S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Name: Age: Sex:: 18-25 25-35 Above 35 Male FemaleDocument3 paginiName: Age: Sex:: 18-25 25-35 Above 35 Male FemaleAnkit GoyalÎncă nu există evaluări
- Vishal ThakurDocument2 paginiVishal ThakurAnkit GoyalÎncă nu există evaluări
- Working With Emacs: Linux FoundationDocument2 paginiWorking With Emacs: Linux FoundationAnkit GoyalÎncă nu există evaluări
- Section 19. Inter-Integrated Circuit™ (I C™) : HighlightsDocument54 paginiSection 19. Inter-Integrated Circuit™ (I C™) : HighlightsAnkit GoyalÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Compressor Anti-Surge ValveDocument2 paginiCompressor Anti-Surge ValveMoralba SeijasÎncă nu există evaluări
- HKV-8 Valve Catalog SPLRDocument128 paginiHKV-8 Valve Catalog SPLRCabrera RodriguezÎncă nu există evaluări
- CS405PC JP Unit-3Document44 paginiCS405PC JP Unit-3MEGHANA 3Încă nu există evaluări
- Klüberpaste HS 91-21 EN enDocument4 paginiKlüberpaste HS 91-21 EN entroy2k0Încă nu există evaluări
- SPACE GASS 12 ManualDocument968 paginiSPACE GASS 12 Manualozbuild100% (3)
- Midterm Exam Summary For Data Communications PDFDocument9 paginiMidterm Exam Summary For Data Communications PDFKit Jason MonjeÎncă nu există evaluări
- Exam H13-611: IT Certification Guaranteed, The Easy Way!Document96 paginiExam H13-611: IT Certification Guaranteed, The Easy Way!AdeyemiÎncă nu există evaluări
- Case StudyDocument6 paginiCase Studyzaid bin shafiÎncă nu există evaluări
- How To Find Equilibrium Price and Quantity MathematicallyDocument2 paginiHow To Find Equilibrium Price and Quantity MathematicallyJoshua S Mjinja100% (1)
- PowerPoint Practice Exercise 1 InstructionsDocument3 paginiPowerPoint Practice Exercise 1 InstructionsErick OumaÎncă nu există evaluări
- Ns 3 TutorialDocument105 paginiNs 3 TutorialparabavireoÎncă nu există evaluări
- PDF 4.6 MDocument2 paginiPDF 4.6 MmdisicÎncă nu există evaluări
- Introduction To Computer Networks: NetworkDocument61 paginiIntroduction To Computer Networks: NetworkSaihari NarayanÎncă nu există evaluări
- Report OmarDocument14 paginiReport OmarYasir KhursheedÎncă nu există evaluări
- Alkyl Halides and Amines Mcqs KeyDocument3 paginiAlkyl Halides and Amines Mcqs KeySameer HussainÎncă nu există evaluări
- Binomial Poisson Normal DistributionDocument9 paginiBinomial Poisson Normal DistributionFahim MahmudÎncă nu există evaluări
- Ultrasonic Insertion: Technical Information PW-4Document2 paginiUltrasonic Insertion: Technical Information PW-4Miguel ArriecheÎncă nu există evaluări
- Topic: Partnership: Do Not Distribute - Highly Confidential 1Document7 paginiTopic: Partnership: Do Not Distribute - Highly Confidential 1Tharun NaniÎncă nu există evaluări
- Angle DesignDocument245 paginiAngle DesignGian CarloÎncă nu există evaluări
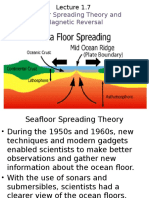
- Seafloor Spreading TheoryDocument16 paginiSeafloor Spreading TheoryMark Anthony Evangelista Cabrieto100% (1)
- Gree Dehumidifier Service ManualDocument58 paginiGree Dehumidifier Service Manualjdv1234Încă nu există evaluări
- ScriptHookDotNet ReadmeDocument8 paginiScriptHookDotNet ReadmeFajar Hari MuliaÎncă nu există evaluări
- Normativ Panouri SandwichDocument58 paginiNormativ Panouri SandwichAlex ChiraÎncă nu există evaluări
- Partial Differential Equations (Pdes)Document5 paginiPartial Differential Equations (Pdes)uploadingpersonÎncă nu există evaluări
- Infinera 7100 Series: Compact and Flexible Packet Optical Transport For The MetroDocument2 paginiInfinera 7100 Series: Compact and Flexible Packet Optical Transport For The MetroTaha AlhatmiÎncă nu există evaluări
- G3600 A4 Brochures PDFDocument4 paginiG3600 A4 Brochures PDFVictor NunezÎncă nu există evaluări
- Digital Signal ProcessingDocument6 paginiDigital Signal Processing5adjcourt allagaddaÎncă nu există evaluări
- Fiitjee Fiitjee Fiitjee Fiitjee: Fortnightly Assessment QuizDocument8 paginiFiitjee Fiitjee Fiitjee Fiitjee: Fortnightly Assessment QuizIshaan BagaiÎncă nu există evaluări
- Catalogue Solid Core PDFDocument16 paginiCatalogue Solid Core PDFdangodÎncă nu există evaluări
- Ericsson Command LineDocument39 paginiEricsson Command LinejulescarrelÎncă nu există evaluări