S-ar putea să vă placă și
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Study of Structural Behaviour of Gravity Dam With Various Features of Gallery by FEMDocument8 paginiStudy of Structural Behaviour of Gravity Dam With Various Features of Gallery by FEMIDESÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Optimal Placement of DG For Loss Reduction and Voltage Sag Mitigation in Radial Distribution Systems Using ABC AlgorithmDocument6 paginiOptimal Placement of DG For Loss Reduction and Voltage Sag Mitigation in Radial Distribution Systems Using ABC AlgorithmIDESÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Various OSI Layer Attacks and Countermeasure To Enhance The Performance of WSNs During Wormhole AttackDocument6 paginiVarious OSI Layer Attacks and Countermeasure To Enhance The Performance of WSNs During Wormhole AttackIDESÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Rotman Lens Performance AnalysisDocument6 paginiRotman Lens Performance AnalysisIDESÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Opportunities and Challenges of Software CustomizationDocument11 paginiOpportunities and Challenges of Software CustomizationIDESÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Shot Boundary Detection Using Radon Projection MethodDocument5 paginiShot Boundary Detection Using Radon Projection MethodIDESÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- License Agreement - The Resolve StoreDocument2 paginiLicense Agreement - The Resolve StoreNino BezerraÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- TRIPS AgreementDocument6 paginiTRIPS Agreementanuc07Încă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Manual de Densitometro InglesDocument91 paginiManual de Densitometro Inglesprincipito12Încă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
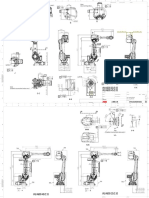
- Irb 4600Document3 paginiIrb 4600Arvydas Gaurilka0% (1)
- Increase The Frequency Resolution of PWM ModulesDocument10 paginiIncrease The Frequency Resolution of PWM Modulesxeratule100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Time Team - Colne PrioryDocument57 paginiTime Team - Colne PrioryWessex ArchaeologyÎncă nu există evaluări
- Specman E Reference PDFDocument1.520 paginiSpecman E Reference PDFAntonio AlencarÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Exchanging Value: Negotiating Technology Licensing AgreementsDocument182 paginiExchanging Value: Negotiating Technology Licensing AgreementskarolyedwinÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Fme Project StakeholderDocument35 paginiFme Project StakeholderikrudisÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Ieee C135.61-2006Document15 paginiIeee C135.61-2006lduong4Încă nu există evaluări
- Terminal Lubrication General Guidelines - Crimp Lubrication Guidelines - 20170516 - Legal ApprovedDocument1 paginăTerminal Lubrication General Guidelines - Crimp Lubrication Guidelines - 20170516 - Legal ApprovedChung LeÎncă nu există evaluări
- Protection of Copyright in The Digital Age The Role and Liabilities of ISPs in IndiaDocument7 paginiProtection of Copyright in The Digital Age The Role and Liabilities of ISPs in Indiavipul0457Încă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Mysql Workshop Environment: Ivan Ma 2019-03Document8 paginiMysql Workshop Environment: Ivan Ma 2019-03Dang Huu AnhÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- United States PatentDocument8 paginiUnited States PatentClaudinei MayerÎncă nu există evaluări
- Plastic Mesh Sleeving For Parts Protection & PackagingDocument4 paginiPlastic Mesh Sleeving For Parts Protection & PackagingRoccinanteÎncă nu există evaluări
- Wire Crochet Ring Tutorial WBDDocument20 paginiWire Crochet Ring Tutorial WBDJerry Lynn ThompsonÎncă nu există evaluări
- Sightreading Jazz Bass Clef EtudesDocument18 paginiSightreading Jazz Bass Clef EtudesKent Hayden100% (2)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- JCA SketchUp Lesson 09 1572363541Document18 paginiJCA SketchUp Lesson 09 1572363541FUNT STERLING. РАЗРАБОТЧИК ИГРÎncă nu există evaluări
- Robotiq Palletizing: SolutionDocument97 paginiRobotiq Palletizing: SolutionKien Nguyen TrungÎncă nu există evaluări
- Code of Practice For Concrete Structures For The Storage of Líquids NZS 3106-1986Document79 paginiCode of Practice For Concrete Structures For The Storage of Líquids NZS 3106-1986Josué Azurín RendichÎncă nu există evaluări
- LicenseDocument2 paginiLicenseDZ07 DZ07Încă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- SMC 9.3.1Document424 paginiSMC 9.3.1nagap1914Încă nu există evaluări
- EP Family Corp. v. Chen - Order On Default JudgmentDocument10 paginiEP Family Corp. v. Chen - Order On Default JudgmentSarah BursteinÎncă nu există evaluări
- Manual Monitor Contec 6000 PDFDocument116 paginiManual Monitor Contec 6000 PDFLuisa Fernandez100% (1)
- Manual Tekla18Document90 paginiManual Tekla18Caraiane CatalinÎncă nu există evaluări
- Innovative Marketing Strategies Raise AwarenessDocument4 paginiInnovative Marketing Strategies Raise Awarenessakarshverma01Încă nu există evaluări
- Sertraline Hydrocloride ProjectDocument10 paginiSertraline Hydrocloride ProjectkarthikÎncă nu există evaluări
- The Perfect French - Self-Study GuideDocument18 paginiThe Perfect French - Self-Study GuideFaith Cyril67% (3)
- IPL Reviewer - Midterms - Ver 2Document23 paginiIPL Reviewer - Midterms - Ver 2Louise Nicole AlcobaÎncă nu există evaluări
- GSK Fresenius IPAB Order 1 Aug 1 2013 PDFDocument37 paginiGSK Fresenius IPAB Order 1 Aug 1 2013 PDFPragyaÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)