S-ar putea să vă placă și
- Bitcoin Manifesto - Satoshi NakamotoDocument9 paginiBitcoin Manifesto - Satoshi NakamotoJessica Vu100% (1)
- Scissor Lift Truck Safety and Operating ProcedureDocument7 paginiScissor Lift Truck Safety and Operating Procedurenatuan74Încă nu există evaluări
- MATLAB Advanced Programming PDFDocument84 paginiMATLAB Advanced Programming PDFBlue100% (1)
- Answer:: Activity in StatisticsDocument3 paginiAnswer:: Activity in StatisticsRovz GC BinÎncă nu există evaluări
- Digital Design Flow Eda ToolDocument94 paginiDigital Design Flow Eda ToolKrish GokulÎncă nu există evaluări
- RobocodeDocument114 paginiRobocodeJibin George100% (2)
- Reconfigurable Computing: The Theory and Practice of FPGA-Based ComputationDe la EverandReconfigurable Computing: The Theory and Practice of FPGA-Based ComputationÎncă nu există evaluări
- Fast Fourier TransformsDocument19 paginiFast Fourier Transformsapi-3837905Încă nu există evaluări
- Heath y Carter 67Document18 paginiHeath y Carter 67Simon HenriquezÎncă nu există evaluări
- Guideline For Design of Small Hydro Power PlantsDocument210 paginiGuideline For Design of Small Hydro Power PlantsRatnaSiswaty Amir100% (3)
- Guideline For Design of Small Hydro Power PlantsDocument210 paginiGuideline For Design of Small Hydro Power PlantsRatnaSiswaty Amir100% (3)
- Exam Style Answers 3 Asal Physics CBDocument2 paginiExam Style Answers 3 Asal Physics CBAnshul ShahÎncă nu există evaluări
- Build and Release ManagementDocument103 paginiBuild and Release ManagementXuan NguyenÎncă nu există evaluări
- Octave AtBFHDocument296 paginiOctave AtBFHlllÎncă nu există evaluări
- Intelligent Sensor Design Using the Microchip dsPICDe la EverandIntelligent Sensor Design Using the Microchip dsPICÎncă nu există evaluări
- BigDFT Manual 1.4Document35 paginiBigDFT Manual 1.4Sunghyun KimÎncă nu există evaluări
- Stability of Concrete Gravity Dams Against Sliding Contact On The Bottom of Dam Foundation Using The Software ABAQUS and RS-DAMDocument15 paginiStability of Concrete Gravity Dams Against Sliding Contact On The Bottom of Dam Foundation Using The Software ABAQUS and RS-DAMFoolad Gharb100% (1)
- MMW Chapter 2Document43 paginiMMW Chapter 2Ada Edaleen A. Diansuy100% (1)
- PIC Microcontroller Projects in C: Basic to AdvancedDe la EverandPIC Microcontroller Projects in C: Basic to AdvancedEvaluare: 5 din 5 stele5/5 (10)
- ns-3 Tutorial: ns-3 Project Feedback: Ns-Developers@isi - EduDocument62 paginins-3 Tutorial: ns-3 Project Feedback: Ns-Developers@isi - EdumayureshbandÎncă nu există evaluări
- CS50 NotesDocument2 paginiCS50 NotesFelix WongÎncă nu există evaluări
- Reprocessed Polypropylene CopolymerDocument2 paginiReprocessed Polypropylene Copolymernatuan74Încă nu există evaluări
- NG 4Document35 paginiNG 4pmdelgado2Încă nu există evaluări
- PajekDocument98 paginiPajekJ. RodríguezÎncă nu există evaluări
- Net LogoDocument106 paginiNet LogoFa KoÎncă nu există evaluări
- Oopic ManualDocument106 paginiOopic Manualkmyl75Încă nu există evaluări
- Master ThesisDocument155 paginiMaster ThesisAnkur MutrejaÎncă nu există evaluări
- Imfit HowtoDocument29 paginiImfit HowtoGreenhouse MiceÎncă nu există evaluări
- Freefem3D Documentation.: ST Ephane Del Pino, Olivier PironneauDocument64 paginiFreefem3D Documentation.: ST Ephane Del Pino, Olivier PironneauShubhankar BhowmickÎncă nu există evaluări
- Pajek ManualDocument104 paginiPajek Manualmnkrose100% (1)
- Elmer Gui ManualDocument49 paginiElmer Gui ManualTadeu FelixÎncă nu există evaluări
- Osm Rendering Foss4g2010Document51 paginiOsm Rendering Foss4g2010tarokudo3600% (1)
- Tao GATE User ManualDocument663 paginiTao GATE User Manualsquaks7Încă nu există evaluări
- Making Presentations With LaTeXDocument85 paginiMaking Presentations With LaTeXado4112893Încă nu există evaluări
- Time Net, Manual de UsuarioDocument104 paginiTime Net, Manual de UsuarioAlvar SanchezÎncă nu există evaluări
- Implementing Surfaces in Open GLDocument74 paginiImplementing Surfaces in Open GL21680112Încă nu există evaluări
- Feynarts 3.9: User'S GuideDocument96 paginiFeynarts 3.9: User'S GuidetobyopferÎncă nu există evaluări
- Eworld Dev 0.9 AlphaDocument89 paginiEworld Dev 0.9 Alphazouba1Încă nu există evaluări
- GMT Tutorial PDFDocument28 paginiGMT Tutorial PDFDiego Almeida-SilvaÎncă nu există evaluări
- KDE Frameworks CookbookDocument52 paginiKDE Frameworks Cookbookjim_macbookÎncă nu există evaluări
- M21C GridGeneratorDocument80 paginiM21C GridGeneratorFrenki Tres WidyantoroÎncă nu există evaluări
- Calculating Strut-And-Tie Models With Fachwerk and Fachwerk3DDocument9 paginiCalculating Strut-And-Tie Models With Fachwerk and Fachwerk3DSebastian StefanescuÎncă nu există evaluări
- Guide To OSPLDocument74 paginiGuide To OSPLtestuzermanÎncă nu există evaluări
- GMSH GuidelineDocument19 paginiGMSH GuidelineQuazi Shammas100% (1)
- User's Guide For Quantum ESPRESSO (v.6.5)Document26 paginiUser's Guide For Quantum ESPRESSO (v.6.5)Thalia Miranda PereiraÎncă nu există evaluări
- Workreport: Clusters With ELXDocument27 paginiWorkreport: Clusters With ELXjavier_p_dÎncă nu există evaluări
- Qtiplot Manual enDocument322 paginiQtiplot Manual enGennaro TrianiÎncă nu există evaluări
- OptiFDTD TutorialsDocument36 paginiOptiFDTD TutorialsDr-Mandeep SinghÎncă nu există evaluări
- Lab SamplesDocument22 paginiLab SamplesNormalia SamianÎncă nu există evaluări
- Ns 3 TutorialDocument105 paginiNs 3 TutorialGwangwoo ParkÎncă nu există evaluări
- A Survivor's Guide To Java Program Analysis With SootDocument47 paginiA Survivor's Guide To Java Program Analysis With SootphtcostaÎncă nu există evaluări
- Modeller I IntroductionDocument12 paginiModeller I IntroductionjesusÎncă nu există evaluări
- Wavelab Architecture: Jonathan Buckheit and David Donoho, Stanford University December, 2005Document42 paginiWavelab Architecture: Jonathan Buckheit and David Donoho, Stanford University December, 2005dezdeepblueÎncă nu există evaluări
- JFlexDocument48 paginiJFlexsakibatorÎncă nu există evaluări
- Otb Software GuideDocument746 paginiOtb Software GuideDiego ZagoÎncă nu există evaluări
- Ns 3 TutorialDocument105 paginiNs 3 TutorialparabavireoÎncă nu există evaluări
- Py QGISDocument49 paginiPy QGISlogr054nÎncă nu există evaluări
- AC CastemDocument51 paginiAC CastemsovsepÎncă nu există evaluări
- Bullet Quick StartDocument12 paginiBullet Quick StartRogalÎncă nu există evaluări
- Imunes User GuideDocument63 paginiImunes User GuidefstazićÎncă nu există evaluări
- Aafigure Documentation: Release 0.5Document27 paginiAafigure Documentation: Release 0.5railsdontskÎncă nu există evaluări
- Can Open Slave Software ManualDocument65 paginiCan Open Slave Software ManualSyed Mohammad NaveedÎncă nu există evaluări
- Tutorial Manual: LaxisDocument114 paginiTutorial Manual: LaxisMu HardiÎncă nu există evaluări
- High-Performance Tomographic Reconstruction Using OpenCLDocument99 paginiHigh-Performance Tomographic Reconstruction Using OpenCLSebastian SchuberthÎncă nu există evaluări
- Connect Tutorial GeologDocument59 paginiConnect Tutorial GeologkodogsaktiÎncă nu există evaluări
- CBR SystemDocument94 paginiCBR SystemJose Rafael CruzÎncă nu există evaluări
- Osgibook Preview 20090110Document229 paginiOsgibook Preview 20090110Pedro SilvaÎncă nu există evaluări
- Spyglass ManualDocument36 paginiSpyglass ManualbearunagiriÎncă nu există evaluări
- Multi-Platform Graphics Programming with Kivy: Basic Analytical Programming for 2D, 3D, and Stereoscopic DesignDe la EverandMulti-Platform Graphics Programming with Kivy: Basic Analytical Programming for 2D, 3D, and Stereoscopic DesignÎncă nu există evaluări
- Embedded System Design on a Shoestring: Achieving High Performance with a Limited BudgetDe la EverandEmbedded System Design on a Shoestring: Achieving High Performance with a Limited BudgetEvaluare: 4 din 5 stele4/5 (1)
- Pipe Jacking v21 PDFDocument17 paginiPipe Jacking v21 PDFsawwahwahÎncă nu există evaluări
- A Method of Assessing Experimental Design in Mechanical Engineering LaboratoriesDocument13 paginiA Method of Assessing Experimental Design in Mechanical Engineering Laboratoriesnatuan74Încă nu există evaluări
- MechEngHandbook v2 PDocument28 paginiMechEngHandbook v2 Pnatuan74Încă nu există evaluări
- Numerical Modeling of Disc Brake System in Frictional Contact PDFDocument18 paginiNumerical Modeling of Disc Brake System in Frictional Contact PDFnatuan74Încă nu există evaluări
- Herle EPJE SoumisDocument17 paginiHerle EPJE Soumisnatuan74Încă nu există evaluări
- Finite Volume Method: 17.1 The Partial Differential EquationDocument16 paginiFinite Volume Method: 17.1 The Partial Differential EquationabilashurmiseÎncă nu există evaluări
- Memrecam GX-1 Plus Data SheetDocument2 paginiMemrecam GX-1 Plus Data Sheetnatuan74Încă nu există evaluări
- 409812Document102 pagini409812natuan74Încă nu există evaluări
- PV PEG DSa4 0311Document4 paginiPV PEG DSa4 0311natuan74Încă nu există evaluări
- PV PEG DSa4 0311Document4 paginiPV PEG DSa4 0311natuan74Încă nu există evaluări
- Capillary RheometerDocument11 paginiCapillary Rheometercitadel811Încă nu există evaluări
- Implement Turbulence ModelDocument12 paginiImplement Turbulence Modelnatuan74Încă nu există evaluări
- Ubuntu 13.04Document145 paginiUbuntu 13.04Adrian PahomieÎncă nu există evaluări
- 1 s2.0 S1001605811602382 MainDocument9 pagini1 s2.0 S1001605811602382 Mainnatuan74Încă nu există evaluări
- DKE292 Ch18Document36 paginiDKE292 Ch18natuan74Încă nu există evaluări
- مضخة الطرد المركزى- كتيب للتحميلDocument128 paginiمضخة الطرد المركزى- كتيب للتحميلGrundfosEgypt100% (4)
- Gambit 2.3 Exercise 04 Size Functions Boundary LayersDocument7 paginiGambit 2.3 Exercise 04 Size Functions Boundary Layersnatuan74Încă nu există evaluări
- Robertson NonNewtonianNotesDocument85 paginiRobertson NonNewtonianNotesnatuan74Încă nu există evaluări
- Oldroyd ModelDocument7 paginiOldroyd Modelnatuan74Încă nu există evaluări
- Quiz 4Document6 paginiQuiz 4William Jordache SaraivaÎncă nu există evaluări
- Expense QuotasDocument3 paginiExpense QuotasabhiÎncă nu există evaluări
- EENG (INFE) 115 F16-17 Final Exam-SOLUTIONSDocument9 paginiEENG (INFE) 115 F16-17 Final Exam-SOLUTIONSTeki ChweÎncă nu există evaluări
- AyazDocument17 paginiAyazAnsar NiazÎncă nu există evaluări
- ABSTRACTDocument41 paginiABSTRACTSaidhaÎncă nu există evaluări
- 1997-01 Anal. Chem. 69, 3069-3075Document7 pagini1997-01 Anal. Chem. 69, 3069-3075jfrojas60Încă nu există evaluări
- Nanoantenna Directivity and EnhancementDocument4 paginiNanoantenna Directivity and EnhancementRitesh kumar NayakÎncă nu există evaluări
- Experiment 1: Output and Delay Thayja Rae O. Magana: Display (LED) Binary Decimal HexadecimalDocument2 paginiExperiment 1: Output and Delay Thayja Rae O. Magana: Display (LED) Binary Decimal HexadecimalThayja Rae Opiana MaganaÎncă nu există evaluări
- PHYSICS Matters For GCE O' Level Subject Code:5054: Unit 2: KinematicsDocument34 paginiPHYSICS Matters For GCE O' Level Subject Code:5054: Unit 2: KinematicsIqra ArshadÎncă nu există evaluări
- For Integral Representations For Analytic Functions Cauchy Integral FormulaDocument7 paginiFor Integral Representations For Analytic Functions Cauchy Integral Formulasiddh_kec2003Încă nu există evaluări
- Torreti - Bachelard e FenomenotecnicaDocument19 paginiTorreti - Bachelard e FenomenotecnicaGabriel Kafure da RochaÎncă nu există evaluări
- No. 19 Potential PCA Interpretation Problems For Volatility Smile Dynamics Dimitri Reiswich, Robert TompkinsDocument42 paginiNo. 19 Potential PCA Interpretation Problems For Volatility Smile Dynamics Dimitri Reiswich, Robert TompkinsS.K. Tony WongÎncă nu există evaluări
- CASTEP StartupDocument38 paginiCASTEP StartupMuraleetharan BoopathiÎncă nu există evaluări
- Zomato Kolkata Restaurants Dataset: Ankur Pandey Class-1MBAO Register Number - 2228211Document6 paginiZomato Kolkata Restaurants Dataset: Ankur Pandey Class-1MBAO Register Number - 2228211Academic BunnyÎncă nu există evaluări
- What Is Direct VariationDocument2 paginiWhat Is Direct VariationMharaTootÎncă nu există evaluări
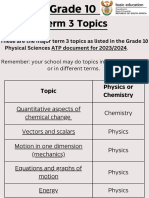
- Grade 10 Term 3 TopicsDocument10 paginiGrade 10 Term 3 TopicsOwamiirh RsaÎncă nu există evaluări
- 1 Eigenvalues, Eigenvectors, Eigenspaces: Eigenvalue Characteristic ValueDocument17 pagini1 Eigenvalues, Eigenvectors, Eigenspaces: Eigenvalue Characteristic ValueSarit BurmanÎncă nu există evaluări
- 01 Thermal ExpansionDocument9 pagini01 Thermal ExpansionCelphy TrimuchaÎncă nu există evaluări
- AlgebraDocument2 paginiAlgebraNumber1tutorÎncă nu există evaluări
- Nowak 2017Document8 paginiNowak 2017Bogdan Marian SorohanÎncă nu există evaluări
- Mikroniek 2010 2 1Document7 paginiMikroniek 2010 2 1Vipin YadavÎncă nu există evaluări
- Phy C332 167Document2 paginiPhy C332 167Yuvraaj KumarÎncă nu există evaluări
- Peter Maandag 3047121 Solving 3-Sat PDFDocument37 paginiPeter Maandag 3047121 Solving 3-Sat PDFVibhav JoshiÎncă nu există evaluări