S-ar putea să vă placă și
- Project Management - The DisciplineDocument27 paginiProject Management - The DisciplineanilaÎncă nu există evaluări
- What To Include in Financial AnalysisDocument12 paginiWhat To Include in Financial Analysisayushi kapoorÎncă nu există evaluări
- Development & Launch PlannerDocument1 paginăDevelopment & Launch PlannerDr. Syed MasrurÎncă nu există evaluări
- Market Research On 3G ServicesDocument30 paginiMarket Research On 3G ServicesV Satya DeepakÎncă nu există evaluări
- Operations Management/Project ManagementDocument3 paginiOperations Management/Project Managementapi-78568109Încă nu există evaluări
- Pitman Liverpool Data Migration Project Brief - CORRECT VERSIONDocument2 paginiPitman Liverpool Data Migration Project Brief - CORRECT VERSIONNuptias UKÎncă nu există evaluări
- MArketingDocument40 paginiMArketingolsenÎncă nu există evaluări
- Ad Review - UfoneDocument11 paginiAd Review - Ufoneadohadwala3955Încă nu există evaluări
- Assignment On Managing Digital Enterprise of Digital MarketDocument17 paginiAssignment On Managing Digital Enterprise of Digital MarketAllen ShafiÎncă nu există evaluări
- UFONEDocument19 paginiUFONEzohaibssÎncă nu există evaluări
- DHL Company PortraitDocument28 paginiDHL Company PortraitIsmail Hossain TusharÎncă nu există evaluări
- Operations Research Project PresentationDocument10 paginiOperations Research Project PresentationSarabjeet SinghÎncă nu există evaluări
- Computer Architecture - SnARM ProjectDocument8 paginiComputer Architecture - SnARM ProjectProject Symphony Collection100% (2)
- Advertising Plan of UfoneDocument14 paginiAdvertising Plan of Ufonezara_meÎncă nu există evaluări
- Hexaware - CSR Report 2017Document4 paginiHexaware - CSR Report 2017Prashant ThakarÎncă nu există evaluări
- IE4240 Interim Project Report LatestDocument21 paginiIE4240 Interim Project Report LatestginsingÎncă nu există evaluări
- Zong ESS-LBSDocument15 paginiZong ESS-LBSSarmadÎncă nu există evaluări
- Furniture Management System: BachelorDocument66 paginiFurniture Management System: BachelorjissmathewÎncă nu există evaluări
- H S S X S S HDocument4 paginiH S S X S S HahmadskhanÎncă nu există evaluări
- Ipad ProposalDocument3 paginiIpad ProposalAmie Botak100% (1)
- Project GraphicsDocument10 paginiProject GraphicsProject GraphicsÎncă nu există evaluări
- Online Courier ServiceDocument17 paginiOnline Courier Servicekaran619parmarÎncă nu există evaluări
- MRO Product Range From Project Sales Corp, IndiaDocument43 paginiMRO Product Range From Project Sales Corp, IndiaProject Sales CorpÎncă nu există evaluări
- TOR - Distribution of Cooking StovesDocument4 paginiTOR - Distribution of Cooking StovessubxaanalahÎncă nu există evaluări
- Bussiness Project BBA SemesterDocument11 paginiBussiness Project BBA SemesterMohammad AliÎncă nu există evaluări
- Enterprise Resource PlanningDocument15 paginiEnterprise Resource PlanningSwaraj LahotyÎncă nu există evaluări
- 04 ERP Development MethodologyDocument15 pagini04 ERP Development MethodologyDr. Syed MasrurÎncă nu există evaluări
- CSR HDFC Ar 2017 PDFDocument6 paginiCSR HDFC Ar 2017 PDFsiddhartha karÎncă nu există evaluări
- 5 Years of Roadside AssistanceDocument6 pagini5 Years of Roadside AssistancezapperwaterÎncă nu există evaluări
- Car Rental Management SystemDocument7 paginiCar Rental Management SystemTania NÎncă nu există evaluări
- Cib PaperDocument38 paginiCib PaperHAZEM WAGDYÎncă nu există evaluări
- Day 5 - Developing Project Network Diagram PDFDocument54 paginiDay 5 - Developing Project Network Diagram PDFSimran BahlÎncă nu există evaluări
- Bus Ticket Reservation System Highblix Academic Final Year ProjectDocument4 paginiBus Ticket Reservation System Highblix Academic Final Year ProjecthighblixÎncă nu există evaluări
- Zoom CarDocument4 paginiZoom Carmahanth gowdaÎncă nu există evaluări
- Hierarchical ModesDocument19 paginiHierarchical ModesAlexandra MihutÎncă nu există evaluări
- 1introduction To The ProjectDocument1 pagină1introduction To The ProjectTheProject Prayer RopeÎncă nu există evaluări
- A Report On Protection, Maintanence, Operation and Analysing The Transformer and Generator Based On Their PerformanceDocument3 paginiA Report On Protection, Maintanence, Operation and Analysing The Transformer and Generator Based On Their PerformanceSwetha ReddyÎncă nu există evaluări
- Sap CRM TrainingDocument5 paginiSap CRM TrainingspkirubaakaranÎncă nu există evaluări
- Our Operational Methodology: Islamic Television ProjectDocument7 paginiOur Operational Methodology: Islamic Television ProjectDr. Syed Masrur100% (1)
- Guidelines For Summer Project ReportDocument5 paginiGuidelines For Summer Project ReportCHIRAG ABROLÎncă nu există evaluări
- Innovatint Lab Training ManualDocument177 paginiInnovatint Lab Training ManualRomeu NataleÎncă nu există evaluări
- Innovatint Basic Manual PDFDocument75 paginiInnovatint Basic Manual PDFRomeu NataleÎncă nu există evaluări
- Mboo33 - Project Management Set - 1 Solved AssignmentDocument16 paginiMboo33 - Project Management Set - 1 Solved Assignmentved_laljiÎncă nu există evaluări
- Aggregate PlanningDocument7 paginiAggregate PlanningbalashankarrÎncă nu există evaluări
- Innovatint Basic Training Manual PDFDocument66 paginiInnovatint Basic Training Manual PDFRomeu NataleÎncă nu există evaluări
- Etisalat S Connected Commerce PlatformDocument6 paginiEtisalat S Connected Commerce PlatformAhmed SelimÎncă nu există evaluări
- International Marketing of Wrist Watch at NigeriaDocument63 paginiInternational Marketing of Wrist Watch at Nigeriakhantausif2010Încă nu există evaluări
- E Business PlanDocument17 paginiE Business PlanM HABIBULLAHÎncă nu există evaluări
- System AnalysisDocument2 paginiSystem AnalysisKinu VermaÎncă nu există evaluări
- Project Proposal: Erail - Railway Reservation System - Vb6 + Ms AccessDocument2 paginiProject Proposal: Erail - Railway Reservation System - Vb6 + Ms AccessAkash RoyÎncă nu există evaluări
- Project Management ProcessDocument5 paginiProject Management ProcessAlejandro Sanchez100% (1)
- Innovatint Version 3 Plugin and Tools v1 20161129 PDFDocument43 paginiInnovatint Version 3 Plugin and Tools v1 20161129 PDFRomeu NataleÎncă nu există evaluări
- Pestal AnalysisDocument9 paginiPestal AnalysisPriyesh PandeyÎncă nu există evaluări
- Innovatint Version 3 Supported Spectrophotometers v1 20161128 PDFDocument5 paginiInnovatint Version 3 Supported Spectrophotometers v1 20161128 PDFRomeu NataleÎncă nu există evaluări
- Sap Strategy at ColgateDocument6 paginiSap Strategy at ColgateTanushree RoyÎncă nu există evaluări
- CAT400 ProjectProposal Azeem Edited3Document13 paginiCAT400 ProjectProposal Azeem Edited3Ahmad Sufril Azlan MohamedÎncă nu există evaluări
- How to Start a Valet Service Business: Step by Step Business PlanDe la EverandHow to Start a Valet Service Business: Step by Step Business PlanÎncă nu există evaluări
- Information System Development Process: Proceedings of the IFIP WG8.1 Working Conference on Information System Development Process, Como, Italy, 1-3 September, 1993De la EverandInformation System Development Process: Proceedings of the IFIP WG8.1 Working Conference on Information System Development Process, Como, Italy, 1-3 September, 1993Încă nu există evaluări
- Business Strategies Complete Self-Assessment GuideDe la EverandBusiness Strategies Complete Self-Assessment GuideÎncă nu există evaluări
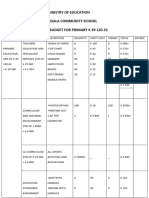
- Ministry of Education Musala SCHDocument5 paginiMinistry of Education Musala SCHlaonimosesÎncă nu există evaluări
- Electrical Estimate Template PDFDocument1 paginăElectrical Estimate Template PDFMEGAWATT CONTRACTING AND ELECTRICITY COMPANYÎncă nu există evaluări
- BSBOPS601 Develop Implement Business Plans - SDocument91 paginiBSBOPS601 Develop Implement Business Plans - SSudha BarahiÎncă nu există evaluări
- GATE General Aptitude GA Syllabus Common To AllDocument2 paginiGATE General Aptitude GA Syllabus Common To AllAbiramiAbiÎncă nu există evaluări
- tdr100 - DeviceDocument4 paginitdr100 - DeviceSrđan PavićÎncă nu există evaluări
- Computer System Architecture: Pamantasan NG CabuyaoDocument12 paginiComputer System Architecture: Pamantasan NG CabuyaoBien MedinaÎncă nu există evaluări
- PovidoneDocument2 paginiPovidoneElizabeth WalshÎncă nu există evaluări
- Final Project Report GMS BtechDocument68 paginiFinal Project Report GMS Btech02Musaib Ul FayazÎncă nu există evaluări
- Bea Form 7 - Natg6 PMDocument2 paginiBea Form 7 - Natg6 PMgoeb72100% (1)
- Fundamental RightsDocument55 paginiFundamental RightsDivanshuSharmaÎncă nu există evaluări
- Scope of Internet As A ICTDocument10 paginiScope of Internet As A ICTJohnÎncă nu există evaluări
- Cds13041 Yamaha PWC Plug-In EcuDocument1 paginăCds13041 Yamaha PWC Plug-In EcuGérôme ZélateurÎncă nu există evaluări
- Audit Certificate: (On Chartered Accountant Firm's Letter Head)Document3 paginiAudit Certificate: (On Chartered Accountant Firm's Letter Head)manjeet mishraÎncă nu există evaluări
- Kompetensi Sumber Daya Manusia SDM Dalam Meningkatkan Kinerja Tenaga Kependidika PDFDocument13 paginiKompetensi Sumber Daya Manusia SDM Dalam Meningkatkan Kinerja Tenaga Kependidika PDFEka IdrisÎncă nu există evaluări
- Effects of Organic Manures and Inorganic Fertilizer On Growth and Yield Performance of Radish (Raphanus Sativus L.) C.V. Japanese WhiteDocument5 paginiEffects of Organic Manures and Inorganic Fertilizer On Growth and Yield Performance of Radish (Raphanus Sativus L.) C.V. Japanese Whitepranjals8996Încă nu există evaluări
- Communication On The Telephone InfoDocument30 paginiCommunication On The Telephone Infomelese100% (1)
- Palm Manual EngDocument151 paginiPalm Manual EngwaterloveÎncă nu există evaluări
- An Over View of Andhra Pradesh Water Sector Improvement Project (APWSIP)Document18 paginiAn Over View of Andhra Pradesh Water Sector Improvement Project (APWSIP)gurumurthy38Încă nu există evaluări
- Matrix of Consumer Agencies and Areas of Concern: Specific Concern Agency ConcernedDocument4 paginiMatrix of Consumer Agencies and Areas of Concern: Specific Concern Agency ConcernedAJ SantosÎncă nu există evaluări
- OrganometallicsDocument53 paginiOrganometallicsSaman KadambÎncă nu există evaluări
- Your Electronic Ticket ReceiptDocument2 paginiYour Electronic Ticket Receiptjoana12Încă nu există evaluări
- Circuitos Digitales III: #IncludeDocument2 paginiCircuitos Digitales III: #IncludeCristiamÎncă nu există evaluări
- Paul Milgran - A Taxonomy of Mixed Reality Visual DisplaysDocument11 paginiPaul Milgran - A Taxonomy of Mixed Reality Visual DisplaysPresencaVirtual100% (1)
- In Partial Fulfillment of The Requirements For The Award of The Degree ofDocument66 paginiIn Partial Fulfillment of The Requirements For The Award of The Degree ofcicil josyÎncă nu există evaluări
- EW160 AlarmsDocument12 paginiEW160 AlarmsIgor MaricÎncă nu există evaluări
- 133 The Science and Understanding of TheDocument14 pagini133 The Science and Understanding of TheCarlos RieraÎncă nu există evaluări
- RetrieveDocument8 paginiRetrieveSahian Montserrat Angeles HortaÎncă nu există evaluări
- Concrete For Water StructureDocument22 paginiConcrete For Water StructureIntan MadiaaÎncă nu există evaluări
- Power For All - Myth or RealityDocument11 paginiPower For All - Myth or RealityAshutosh BhaktaÎncă nu există evaluări
- Between:-Mr. Pedro Jose de Vasconcelos, of Address 14 CrombieDocument2 paginiBetween:-Mr. Pedro Jose de Vasconcelos, of Address 14 Crombiednd offiÎncă nu există evaluări