Documente Academic
Documente Profesional
Documente Cultură
III Prog Instructions
Încărcat de
varunshyamDescriere originală:
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
III Prog Instructions
Încărcat de
varunshyamDrepturi de autor:
Formate disponibile
Automation– and Drive Technology- SCE
Training document for the company-wide
automation solution
Totally Integrated Automation (T I A)
Appendix III
Basic programming instructions
LAD/FBD/STL in STEP 7
T I A Training document Page 1 of 32 Appendix III
Last revision: 02/2002 Basic programming instructions LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
This document was provided by Siemens A&D SCE (automation and drive technology, Siemens A&D
Cooperates with Education) for training purposes. Siemens does not make any type of guarantee regarding
its contents.
The passing on or duplication of this document, including the use and report of its contents, is only permitted
within public and training facilities.
Exceptions require written permission by Siemens A&D SCE (Mr. Knust: E-Mail:
michael.knust@hvr.siemens.de). Offences are subject to possible payment for damages caused. All rights
are reserved for translation, and any case of patenting or GM entry.
We thank the company Michael Dziallas Engineering and the instructors of vocational schools as well as
further persons for the support with the production of the document.
T I A Training document Page 2 of 32 Appendix III
Last revision: 02/2002 Basic programming instructions LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
PAGE:
1. Forward......................................................................................................... ....... 5
2. Basic Programming Instructions................................................................... ... 6
2.1 Assignment.............................................................................................. ............. 6
2.2 AND - Operation.............................................................................. ..................... 6
2.3 OR - Operation............................................................................ ......................... 7
2.4 AND - before OR - Operation............................................................ ................... 7
2.5 OR - before AND - Operation....................................................... ........................ 8
2.6 Query on signal state 0................................................................ ........................ 9
2.7 Exclusive - OR - Operation........................................................................... ........ 9
2.8 Query of outputs..................................................................................... .............. 10
2.9 R- S – Storage functions............................................................. ......................... 10
2.9.1 Reset dominant......................................................................... ........................... 11
2.9.2 Set dominant............................................................................. ........................... 11
2.10 Edge Operations.................................................................................. ............... 12
2.10.1 Positive Edge (FP)..................................................................................... ........... 12
2.10.2 Negative Edge (FN)............................................................................. ................. 13
2.11 Timer Functions.......................................................................................... ........ 14
2.11.1 Release timer (FR) only in STL.................................................................. .......... 14
2.11.2 Start timer (SI/SE/SD/SS/SF)................................................................ ............... 14
2.11.3 Timer Value (TV)................................................................................................. .. 15
2.11.4 Reset timer (R).............................................................................. ....................... 15
2.11.5 Load timer (L/LC)............................................................................................... ... 15
2.11.6 Query signal state of timer (Q).................................................................. ........... 16
2.11.7 Pulse timer (SI)............................................................................................. ........ 16
2.11.8 Extended pulse timer (SE).......................................................... ......................... 17
2.11.9 On-delay timer (SD)......................................................................................... ..... 18
2.11.10 Retentive On-delay timer (SS)...................................................... ....................... 19
2.11.11 Off-delay timer (SF)............................................................................... ............... 20
2.12 Clock Pulse Generators...................................................................... ............... 21
T I A Training document Page 3 of 32 Appendix III
Last revision: 02/2002 Basic programming instructions LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
PAGE:
2.13 Counter Operations............................................................................... ............. 22
2.13.1 Release counter (FR) only in STL............................................................. ........... 22
2.13.2 Counter Up (CU)........................................................................................ ........... 22
2.13.3 Counter Down (CD)...................................................................... ........................ 22
2.13.4 Set counter (S).................................................................................................... .. 23
2.13.5 Counter Value (CV).............................................................................................. . 23
2.13.6 Reset counter (R)......................................................................... ........................ 23
2.13.7 Load Counter (L/LC).................................................................................. ........... 23
2.13.8 Query signal state of counter (Q)............................................................. ............ 24
2.14 Load- and Transfer Operations (L/T) only in STL...................................... ...... 25
2.15 Comparison Functions............................................................. ......................... 26
2.16 Program Organization.............................................................................. .......... 27
2.16.1 Block Call (CALL)......................................................................... ........................ 27
2.16.2 Conditional Call (CC)................................................................................. ........... 27
2.16.3 Unconditional Call (UC)......................................................................... ............... 28
2.16.4 Open a data block (OPN).................................................................... ................. 28
2.16.5 Block End Conditional (BEC) only in STL..................................... ....................... 28
2.16.6 Block End Unconditional (BEU) only in STL........................................................ 29
2.17 Jump Operations............................................................................. ................... 30
2.17.1 Jump Unconditional (JU).................................................................... .................. 30
2.17.2 Jump if RLO=1/RLO=0 (JC/JCN)........................................................ ................. 30
2.17.3 Loop (LOOP) only in STL.................................................................... ................. 31
2.18 Null Operations..................................................................................... .............. 31
2.18.1 Null operation 0/1 (NOP 0/NOP 1) only in STL.......................................... .......... 31
2.19 Processing of the RLO.............................................................................. ......... 32
2.19.1 Negate RLO (NOT) only in STL................................................. ......................... 32
2.19.2 Set RLO (SET) only in STL............................................................ ...................... 32
2.19.3 Reset RLO (CLR) only in STL.............................................................. ................ 32
2.19.4 Save RLO (SAVE) only in STL........................................................... .................. 32
T I A Training document Page 4 of 32 Appendix III
Last revision: 02/2002 Basic programming instructions LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
1. FORWARD
Appendix III is needed during processing of all modules.
Basics of
STEP 7- Programming
2 - 3 days A modules
Additional functions of
STEP 7- Programming
2- 3 days B modules
Industrial field bus Sequencer Process
system programming visualization
2- 3 days D modules 2- 3 days C 2- 3 days F modules
modules C
IT- Communication
with SIMATIC S7
1- 2 days E modules
Learning goal:
The reader receives a collection of the most important programming instructions which are
needed for the solution of the tasks of programming in the modules within this appendix.
Requirements:
In order for the instructions and the programming mode to be understood, the following knowledge
is assumed:
• PLC- Programming basics (e.g. Appendix I – PLC-Programming basics with SIMATIC S7-
300)
Forward Program instructions
T I A Training document Page 5 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2. BASIC PROGRAMMING INSTRUCTIONS
The following programming instructions are sufficient for the basics of programming. This is
however not a complete listing of all instructions. Information for further instructions in
LAD/FBD/STL can be found in the manuals or in the on-line help under the point of language
description LAD, FBD and/or STL.
2.1 ASSIGNMENT
The assignment (=) copies the logical operation result (RLO) of the preceding operation and
assigns it to the following operand.
An operation chain can be locked by an assignment.
LAD STL
A I 0.0
I 0.0 Q0.0 = Q 0.0
|| ()
FBD
Q 0.0
I 0.0 =
2.2 AND - OPERATION
The AND -Operation corresponds to a series connection of contacts in the circuit diagram. At the
output Q 0.0, the signal status 1 appears if all inputs exhibit a signal status 1 at the same time. If
one of the inputs exhibits a signal status 0, the output remains in a signal status 0.
LAD STL
A I 0.0
I 0.0 I 0.1 Q 0.0 A I 0.1
|| || () = Q 0.0
FBD
Q 0.0
I 0.0
& =
I 0.1
Forward Program instructions
T I A Training document Page 6 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.3 OR - OPERATION
The OR -Operation corresponds to a parallel connection of contacts in the circuit diagram. At the
output Q 0.1, a signal status 1 appears if at least one of the inputs exhibits a signal status 1. Only
if all inputs exhibit a signal status 0, will the signal status at the output remain on 0.
LAD STL
O I 0.2
I 0.2 Q 0.1
O I 0.3
|| () = Q 0.1
I 0.3
||
FBD Q 0.1
I 0.2
>1 =
I 0.3
2.4 AND - BEFORE OR - OPERATION
The AND- before -OR -Operation corresponds to a parallel set-up of several contacts in the circuit
diagram.
With these branches from rows and parallel circuits aligned together, the output 0.1 is fed the
signal status 1, if in at least one branch of all contacts switched in the row are closed (have a
signal status 1).
The AND before OR- Operations are programmed without parentheses in the STL representation,
however the parallel circuit branches must be separated by the input of the character O (OR
function). First the AND functions are edited and from their results the result of the OR function is
formed. The first AND function (I 0,0, I 0,1) becomes separated by the second AND function (I 0,2,
I 0,3) through the single O (OR function).
LAD FBD STL
I 0.0 A I 0.0
I 0.0 I 0.1 Q 0.1 A I 0.1
|| || &
() I 0.1
Q 0.1 U
O
I 0.2 I 0.3 A I 0.2
A I 0.3
|| || >1 = = Q 0.1
I 0.2
&
I 0.3
The AND- Operations have priority and will always execute before the OR- Operations.
Forward Program instructions
T I A Training document Page 7 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.5 OR - BEFORE AND - OPERATION
The OR – before -AND operation corresponds to a series connection of several contacts joined in
parallel in the circuit diagram.
With these branches from the rows and parallel circuits aligned together, the output 1.0 is fed the
signal status 1, if in both branches at least one of the contacts switched in the row is closed (have
a signal status 1).
LAD FBD STL
A(
I 1.0 O I 1.0
I 1.0 I 1.2 Q 1.0 >1 O I 1.1
Q 1.0 )
|| || () I 1.1
A(
I 1.1 I 1.3 O I 1.2
|| || & = O I 1.3
I 1.2 )
>1 = Q 1.0
I 1.3
Parenthesis must be used on the OR- Operations so that they will have a higher priority than the
AND- Operations.
Forward Program instructions
T I A Training document Page 8 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.6 QUERY ON SIGNAL STATE 0
The debugging for the signal status 0 corresponds in a contact-afflicted circuit to an open contact
and is realized in the connection AND NOT (AN), OR NOT (ON) and EXCLUSIVE OR NOT (XN).
Example of an OR NOT - Operation:
LAD STL
O I 0.2
I 0.2 Q 0.1
ON I 0.3
|| () = Q 0.1
I 0.3
|/|
FBD Q 0.1
I 0.2
>1 =
I 0.3
2.7 EXCLUSIVE - OR - OPERATION
The circuit shows an exclusive-OR operation (X), with which the output 1.0 is switched on (signal
status 1) if only one of the inputs exhibits a signal status of 1. In an contact-afflicted circuit, this
can be realized only with normally open and closed contacts.
LAD STL
I 1.0 I 1.1 Q 1.0
|| |/| () X I 1.0
I 1.0 I 1.1 X I 1.1
|/| || = Q 1.0
FBD
I 1.0
XOR Q 1.0
I 1.1
Caution: The exclusive- OR- Operation should only be used with exactly two inputs.
Forward Program instructions
T I A Training document Page 9 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.8 QUERY OF OUTPUTS
For the switching on of the outputs Q 1.0 and Q 1.1, different conditions apply. In these cases a
current path and/or an operation symbol must be planned for each output. There the automation
equipment can query not only the signal status of inputs, outputs, bit memories, etc. It will also
query the outputs Q 1.1 and Q 1.0 from the AND operation.
FBD STL
Q 1.0
A I 1.0
I 1.0 A I 1.1
I 1.1
& = =
A
Q 1.0
Q 1.0
A I 1.2
Q 1.1 = Q 1.1
Q 1.0
& =
I 1.2
LAD
I 1.0 I 1.1 Q 1.0
|| || ()
Q 1.0 I 1.2 Q 1.1
|| || ()
2.9 R - S – STORAGE FUNCTIONS
According to DIN 40900 and DIN 19239, an R-S memory function is represented as a rectangle
with the set input S and the reset input R. A signal status 1 at the set input S sets the memory
function. A signal status 1 at the reset input R results in the resetting of the memory function. A
signal status 0 at the inputs R and S does not change the previously set condition. Should a
signal status 1 be applied to both inputs R and S simultaneously, the function will be set or reset.
This priority resetting or setting must be considered with programming.
Forward Program instructions
T I A Training document Page 10 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.9.1 RESET DOMINANT
LAD(1) STL
I 1.1 Q 2.0
A I 1.1
|| (S) S Q 2.0
I 1.0 Q 2.0 A I 1.0
R Q 2.0
|| (R)
LAD(2) FBD Q 2.0
Q 2.0
I 1.1 Q 2.0
SR I 1.1 S
|| S Q () Q 2.0
I 1.0
|| R I 1.0 R Q =
The last operations programmed are worked on by the control with priority. In the example the set
operation is first implemented; the output Q 2.0 is again reset and remains reset for the remainder
of program processing.
This brief setting of the output is accomplished only in the process image. A signal status on the
pertinent I/O rack is not affected during program processing.
2.9.2 SET DOMINANT
In accordance with section 4.10.1. the exit Q 2.1 in this example is set with priority.
LAD(1) STL
I 1.1 Q 2.1
A I 1.1
|| (R) R Q 2.1
I 1.0 Q 2.1 A I 1.0
S Q 2.1
|| (S)
LAD(2) Q 2.1 FBD Q 2.1
I 1.1 Q 2.1
RS I 1.1 R
|| R Q () Q 2.1
I 1.0
|| S I 1.0 S Q =
Forward Program instructions
T I A Training document Page 11 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.10 EDGE OPERATIONS
The edge (flank) operations collect in contrary to a static signal status "0" and "1" the signal
change e.g. of a input. The program of an edge operation corresponds to an edge-recognizing
contact in a relay circuit.
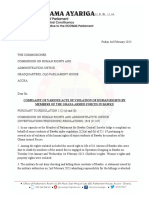
2.10.1 POSITIVE EDGE (FP)
If a rising (positive) edge (change from “0“ to “1“) is recognized by I 0.2, then Q 4.0 for a OB1-
Cycle is set to “1“. This output can be again used e.g. to set a memory bit. A rising edge is
recognized, as the automation system stores the RLO, which supplied the operation A, in the edge
memory bit M 2.0 and compares it with the RLO of the preceding cycle.
The advantage of the second type of representation in LAD/FBD is that logical operations can also
be present at the input of the edge operation.
LAD/FBD
STL
I 0.2
Q 4.0 A I 0.2
POS FP M 2.0
Q ( ) = Q 4.0
M 2.0 M_BIT
or:
M 2.0 Q 4.0
I 0.2 P ()
Signal state chart
I 0.2 1
0
M 2.0 1
0
1
Q 4.0
0
OB1Cycle 1 2 3 4 5 6 7 8 9 10 11 12
Forward Program instructions
T I A Training document Page 12 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.10.2 NEGATIVE EDGE (FN)
If a falling (negative) edge (change of “1“ to “0“) is recognized by I 0.2, then Q 4.0 for a OB1-Cycle
is set to “1“. This output can be used again e.g. to set a memory bit. A falling edge is recognized,
as the automation system stores the RLO, which supplied the operation A in the edge memory bit
M 2.0, and compares it with the RLO of the preceding cycle. The advantage of the second type of
representation in LAD/FBD is that logic operations can also be present at the input of the edge
operation.
LAD/FBD
STL
I0.2
Q 4.0 A I 0.2
NEG FN M 2.0
A ( ) = Q4.0
M 2.0 M_BIT
or:
M 2.0 Q 4.0
I 0.2 N ()
Signalstate chart
I 0.2 1
0
M 2.0 1
0
1
Q 4.0
0
OB1Cycle 1 2 3 4 5 6 7 8 9 10 11 12
Forward Program instructions
T I A Training document Page 13 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.11 TIMER FUNCTIONS
For the realization of control tasks, different timer functions must be frequently used. The timer
functions are integrated in the CPU of the automation equipment. The setting of the desired
running time and the starting of the timer function must be made by the user program. The
SIMATIC - Automation devices place a certain number of timer elements (CPU dependent) with
different timer functions at one’s disposal. A 16-bit-word is assigned to each of the time elements.
The following functions can be programmed with a timer:
2.11.1 RELEASE TIMER (FR) ONLY IN STL
A positive edge change ( from “0“ to “1“ ) in the operation result of the release timer operation (FR)
will release a timer.
For starting or for the normal function of a timer, the release is not needed. The release is used
only in order to re-trigger a current time i.e. to let it start again. This restart is possible only if the
starting operation is edited further with the RLO ‘1‘.
The operation release (FR) exists only in the programming language
STL
2.11.2 START TIMER (SI/SE/SD/SS/SF)
With a signal change at the start input (positive edge), the timer is started. In order to start a timer,
you must insert three operations in its STL program:
• Query of a signal status e.g.:
• Load a starting time into ACCU 1 A I 0.0
• Start operations (alternatively SI, SE, SD, SS or SF) L S5T#2S
SE T5
Forward Program instructions
T I A Training document Page 14 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.11.3 TIMER VALUE (TV)
A timer should always execute for a certain time. The length of time value TV can be assigned
either as a pre-defined constant in the program or can be given as data to an input word IW, to an
output word QW, to a data item DBW/DIW, to a local word LW or to a memory bit word MW.
Updating the time decreases the current value in each case by a unit in an interval, which was
specified by the time base.
You can load a pre-defined current value with the following syntax:
• L W#16#abcd
- with: a = binary coded time base(e.g. time interval or representation unit; see below)
- bcd = time value in BCD- Format
• L S5T#aH_bbM_ccS_dddMS
- with: a = hours, bb = minutes, cc = seconds and ddd = Milliseconds
- The time basis is selected automatically
Time base:
The time base defines the interval, in which the time is decreased by a unit. Values with no exact
multiple of the time interval are cut off. Values, whose representation unit for the desired range is
too large, are rounded off.
Time basis Binary code Time length
10ms 00 10MS to 9S_990MS
100ms 01 100MS to 1M_39S_900MS
1s 10 1S to 16M_39S
10s 11 10S to 2H_46M_30S
2.11.4 RESET TIMER (R)
A signal at the reset input terminates the processing of the timer. The current time is deleted and
the output Q of the time cell is reset.
2.11.5 LOAD TIMER (L/LC)
A time is stored in a binary coded time word. The value in the word can be loaded as a dual
number (DUAL) or as a BCD number (DEC) into the ACCU and be transferred from there into
other operands - ranges. With STL programming, you have the choice between L T1 for the query
of the dual number and LC T1 for the query of the BCD number.
Forward Program instructions
T I A Training document Page 15 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.11.6 QUERY SIGNAL STATE OF TIMER (Q)
A timer can be queried on its signal status of (“0“ or “1“). Signal statuses can be queried - with A
T1, AN T1, ON T1, etc.... and can later be used for further logical operations.
You can select five different timers:
2.11.7 PULSE TIMER (SI)
The output of a timer, which is started as a pulse, is fed a signal status 1 after starting. (1). The
output is reset, if the programmed length of time has elapsed (2), if the starting signal is reset to
zero (3) or if at the reset input of the timer, a signal status 1 is applied (4). A positive edge change
(of “0“ to “1“) in the logical operation result of the operation release (FR), which starts the time
again (5). This restart is possible only if the starting operation is edited further with the RLO ‘1‘.
FBD STL
T1
A I 0.2
S_PULSE FR T1 Release of the timer T1
(only in STL)
I0.0 S BI MW0 A I 0.0
L S5T#2S Load start time (2s) in ACCU 1
S5T#2S TV DEC MW2 SI T1 Start timer T1 as a pulse
A I 0.1
I0.1 R Q Q 4.0 R T1 Reset timer T1
L T1 Load timer T1 DUAL-coded
T MW0
LAD LC T1 Load timer T1 BCD-coded
T1 T MW2
A T1 Query of the timer T1
S_PULSE = Q 4.0
I0.0 Q 4.0
S
Q ()
S5T#2S TV BI MW0
I0.1 R DEC MW2
Signal state chart with release (FR)
I 0.2 1
0
I 0.0 1
0
I 0.1 1
0
1
Q 4.0 T T T 0
1 2 3 4 5
Forward Program instructions
T I A Training document Page 16 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.11.8 EXTENDED PULSE TIMER (SE)
The output of a timer, which is started as an extended pulse, is fed a signal status 1 after starting
(1). The output is released, if the given length of time has elapsed (2) or if the resetting input of
the timer function is switched on (5).
When the time runs, switching the start input off does not cause the output to reset (locking) (3).
Step - while the time still runs - a renewed signal changes on 1 at the start input and the timer is
again started (re-triggered) (4).
FBD STL
T1
A I 0.0
S_PEXT L S5T#2S Load start time (2s) in ACCU 1
SE T1 Start timer T1 as a pulse
I0.0 S BI MW0 A I 0.1
R T1 Reset timer T1
S5T#2S TV BCD MW2 L T1 Load timer T1 DUAL-coded
T MW0
I0.1 R Q Q 4.0 LC T1 Load timer T1 BCD-coded
T MW2
A T1 Query of the timer T1
LAD = Q 4.0
T1
S_PEXT
I0.0 Q 4.0
S Q ()
S5T#2S TV BI MW0
I0.1 R BCD MW2
Signalstate diagram
I 0.0 1
0
I 0.1 1
0
1
Q 4.0 T T T 0
1 2 3 4 5
Forward Program instructions
T I A Training document Page 17 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.11.9 ON –DELAY TIMER (SD)
The output of a timer, which is started as a signal delay, is fed a signal status 1 after starting only if
the programmed time has elapsed and the RLO 1 is applied at the start input (1). The switching
on of the start input also causes a switching on of the output Q in the given length of time. The
output will reset, if the start input is switched off (2) or if a signal status of 1 is applied at the reset
input of the timer (3). The output Q is not switched on if during time running, the start input is
switched off or a signal status of 1 at the reset input of the timer is closed.
FBD STL
D T1
A I 0.0
S_ODT L S5T#2S Load time (2s) in ACCU 1
SD T1 Start timer T1 as a pulse
I0.0 S BI MW0 A I 0.1
R T1 Reset timer T1
S5T#2S TV BCD MW2 L T1 Load timer T1 DUAL-coded
T MW0
I0.1 R Q Q 4.0 LC T1 Load timer T1 BCD-coded
T MW2
A T1 Query of the timer T1
LAD = Q 4.0
T1
S_ODT
I0.0 Q 4.0
S
Q ()
S5T#2S TW BI MW0
I0.1 R BCD MW2
Signal state diagram
I 0.0 1
0
I 0.1 1
0
T T 1
Q 4.0 T
0
1 2 3
Forward Program instructions
T I A Training document Page 18 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.11.10 RETENTIVE ON-DELAY TIMER (SS)
The output of a timer, which is started as a retentive ON delay, is fed a signal status 1 after
starting only if the programmed time has elapsed (1). The function no longer requires an RLO 1
after starting at the start input, thus it cannot be switched off (locking) (3).
The output is reset only if the reset input of the timer function is switched on (2). As long as the
time is running, a switching off and renewed switching on of the start input causes the timer
function to become once again started (re-triggered) (4).
FBD STL
T1
A I 0.0
S_ODTS L S5T#2S Load time (2s) in ACCU 1
SS T1 Start timer T1 as a pulse
I0.0 S BI MW0 A I 0.1
R T1 Reset timer T1
S5T#2S TV BCD MW2 L T1 Load timer T1 DUAL-coded
T MW0
I0.1 R Q Q 4.0 LC T1 Load timer T1 BCD-coded
T MW2
A T1 Query of the timer T1
LAD = Q 4.0
T1
S_ODTS
I0.0 Q 4.0
S
Q ()
S5T#2S TV BI MW0
I0.1 R BCD MW2
Signalstate diagram
I 0.0 1
0
I 0.1 1
0
T T T 1
Q 4.0
0
1 2 3 4
Forward Program instructions
T I A Training document Page 19 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.11.11 OFF-DELAY TIMER (SF)
With a signal change (positive edge) at the start input of a timer which is started as a switched off
delay, the output Q of the timer function is switched on (1). If the start input is switched off, the
output is still supplied with the signal status 1 until the programmed time has elapsed (2).
Switching the start input (negative edge) around the given length of time, causes the switching of
the input off. The output of the timer is also switched off, if at the reset input, the signal status 1 is
applied (4). While the time runs, the renewed switching on of the time function causes the
execution time to be stopped and then again started only by the next switching off of the start input
(3).
If both the start input and the reset input of the timer function are fed a signal status 1, the exit of
the timer will only be set if the dominate reset is switched off (5).
FBD STL
T1
A I 0.0
S_OFFDT L S5T#2S Load start time (2s) in ACCU 1
SF T1 Start timer T1 as a pulse
I0.0 S BI MW0 A I 0.1
R T1 Reset timer T1
S5T#2S TW BCD MW2 L T1 Load timer T1 DUAL-coded
T MW0
I0.1 R Q Q 4.0 LC T1 Load timer T1 BCD-coded
T MW2
A T1 Query of the T1
LAD = Q 4.0
T1
S_OFFDT
I0.0 Q 4.0
S
Q ()
S5T#2S TW BI MW0
I0.1 R BCD MW2
Signal state diagram
I 0.0 1
0
I 0.1 1
0
1
Q 4.0 T
T 0
1 2 3 4 5
Forward Program instructions
T I A Training document Page 20 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.12 CLOCK PULSE GENERATORS
Clock pulse generators clocks are used for different checking -, monitoring and control tasks. In
digital technology, they are called astable trigger circuits. Frequently in operation practice, one
needs a flash frequency or fault signals.
In the CPU S7-300, there exists a parameterized clock memory, that can
be set with the Tool S7 Configuration.
Clock memory parameterizing:
Clock memories are memory bits inside of “clock memory bytes“. Any memory bit of the CPU
becomes a “clock memory byte“ by parameterizing (Double click on the CPU line in the Tool
Configuration!). A clock memory changes its binary value periodically.
If you activate Clock Memory (check is visible in the small control box), then you must also
determine the number of the memory byte. The selected memory byte cannot be used for the
intermediate storage of data.
Period length from clock:
Each bit of the clock memory byte is assigned a period length/frequency. The following
assignments apply:
Bit: 7 6 5 4 3 2 1 0
Period length (s): 2 1.6 1 0.8 0.5 0.4 0.2 0.1
Frequency (Hz): 0.5 0.625 1 1.25 2 2.5 5 10
Forward Program instructions
T I A Training document Page 21 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.13 COUNTER OPERATIONS
In control engineering, counter functions are needed for collecting the number of items or pulses
and for the evaluation of times and distances. In the SIMATIC S7, counters are already integrated
in the CPU. These counters possess their own reserved storage area. The range of the count
value lies between 0 and 999.
The following functions can be programmed with a counter:
2.13.1 RELEASE COUNTER (FR) ONLY IN STL
A positive edge change (of “0“ to “1“) in the logical operation of the operation release (FR) releases
a counter.
A counter release is not needed for setting a counter or for normal counting operations. However,
if one wants to set a counter without a rising edge before the appropriate counting operation (CU,
CD or S), then this can take place with a release. This is however possible only if the RLO bit
before the appropriate operation (CU, CD or S) has a signal status “1“.
The operation release (FR) only exists in the programming language
STL.
2.13.2 COUNTER UP (CU)
The value of the addressed counter is increased by 1. The function becomes effective only with a
positive edge change of the logical operation programmed before CU. If the count value achieves
the upper limit of 999, it is no longer increased. (a carry is not generated!)
2.13.3 COUNTER DOWN (CD)
The value of the addressed counter is reduced by 1. The function becomes effective only with a
positive edge change of the logical operation programmed before CD. If the count value achieves
the lower limit 0, it is no longer reduced. (Only positive counter values! )
Forward Program instructions
T I A Training document Page 22 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.13.4 SET COUNTER (S)
In order to set a counter, you must insert three operations into its STL program:
• Query a signal status
e.g.:
• Load a count value
A I 2.3
• Set a counter with the loaded count of the function.
L C#5
This function is only edited by a positive edge change ofS C1
the query.
2.13.5 COUNTER VALUE (CV)
If a counter is set, then the contents of ACCU 1 are used as the count . There is a possibility to
code the count value either as binary or BCD code. The following operands are possible:
- Input word IW ..
- Output word QW ..
- Memory bit word MW ..
- Data word DBW/DIW ..
- Local data wordLW ..
- Constant C#5, 2#...etc.
2.13.6 RESET COUNTER (R)
The counter is set to zero (to reset) with RLO 1. The counter remains unchanged with RLO 0.
Resetting a counter works statically. During a satisfied resetting condition, a counter can be
neither set nor counted.
2.13.7 LOAD COUNTER (L/LC)
A count is stored in a counter word binary code. The value in the counter can be loaded as a dual
number (DU) or as BCD number (DE) into the ACCU and be transferred from there into other
operand ranges. With STL programming, you have the choice between L C1 for the query of the
dual number and LC C1 for the query of the BCD number.
Forward Program instructions
T I A Training document Page 23 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.13.8 QUERY SIGNAL STATE OF COUNTER (Q)
A counter can be tested for its signal status. The meaning of the signal states are:
Signal state 0 = Counter stays on the value 0;
Signal state 1 = Counter runs, i.e. it is count ready.
Signal statuses can be queried with A C1, AN C1, ON C1, etc.... and can be used for further logical
operations.
FBD C1 STL
COUNTER
I0.0 CU A I 0.7 Release (only in STL)
FR C1
I0.1 CD A I 0.0
I0.2 CU C1 Count up
S CV QW2
A I 0.1
C#5 PV CV_BCD QW4 CD C1 Count down
A I 0.2
I0.3 R Q Q 0.0 L C#5 Load counter with default value
S C1 Set counter with default value
LAD C1 A I 0.3
R C1 Rest counter C1
I0.0 Q 0.0 L C1 Load counter C1 DUAL-coded
COUNTER T QW2
CU Q ()
LC C1 Load counter C1 BCD-coded
I0.1 CD T QW4
A C1 Query of the counter C1
I0.2 S = Q 0.0
C#5 PV CV QW2
I0.3 R CV_BCD QW4
Signal state chart:
FR
CU
CD
Q 0.0
Forward Program instructions
T I A Training document Page 24 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.14 LOAD-AND TRANSFER OPERATIONS (L/T) ONLY IN STL
In the programming language STEP 7, load and transfer operations make byte -, word -, and/or the
double-word orientated exchange of information between input and output modules, the process-
image of the input and output, the timer, the counter, and memory bit storage as well as data
blocks possible. This information exchange is not made directly, but always by the accumulator 1
(ACCU 1). The ACCU 1 is a register in the processor and serves as a buffer.
The information flow is directed as follows:
LOAD: from the source memory into the ACCU 1
TRANSFERRING: of the ACCU into the target memory
LOAD TRANS
ACCU 1
FERRING
SOURCE 31 16 15 0
TARGET MEM.
MEMORY
While the loading contents of the addressed source memory are copied and written into the ACCU
1, The previous ACCU content is transferred into the ACCU 2. When transferring, the contents of
ACCU 1 are copied and written into the addressed target memory.
Since the accumulator content was only copied, it is available for further transfer operations.
STL:
: L IW 0
(*1) (*2)
PII IW 0 QW 4
: T QW 4
ACCU PIQ
: L +5
: T QW 6
Constant +5 ACCU QW 6 PIQ
: BE
*1: Process-image of the input area *2: Process-image of the output area
Load and transferring are absolute operations, which are implemented independently of the logical
operations result in each cyclic circulation.
Forward Program instructions
T I A Training document Page 25 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.15 COMPARISON FUNCTIONS
The programming language STEP 7 offers the possibility of comparing two numerical values
directly and advancing the result of the comparison (RLO) immediately. A condition for it is that
both numbers have the same number format. The following pairs of numerical values can be
compared:
• two integers ( 16 Bit Symbol: I )
• two integers ( 32 Bit Symbol: D )
• two real numbers (Floating point numbers. 32 Bit, Symbol: R )
There are 6 different comparison operations to choose from:
equal = =
unequal <>
Is word of counter C1 greater or equal > = To word of counter C2 ?
( in Accu 2) greater > ( in Accu 1 )
smaller or equal < =
smaller <
With the comparison functions, two values which lie in the ACCUs 1 and 2 are compared directly
with each other. With the first load operation, the first operand (e.g. IW 0) is loaded into ACCU 1.
With the second load operation, first the first operand is reloaded by the ACCU 1 into ACCU 2 and
then the second operand (e.g. IW 2) is loaded into ACCU 1. Afterwards the numerical values in
the arithmetic block in both accumulators are compared with one another bit by bit. The result of
the comparison is binary. If the desired comparison is satisfied, the operation result becomes 1. If
the desired comparison is not satisfied, then the RLO becomes 0.
FBD / LAD STL ACCU 1 ACCU 2
Q 4.7
IW 0 * * *
CMP ( ) L IW 0
> I
IIW 0 IN 1
IW 2 IW 0
L IW 2
IIW 2 IN 2
> I Arithmetic block
= Q 4.7 RLO
Forward Program instructions
T I A Training document Page 26 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.16 PROGRAM ORGANIZATION
2.16.1 BLOCK CALL (CALL)
With the module call CALL, you can call functions (FCs) and functional blocks (FBs) as well as
system functions (SFCs) and system function blocks (SFBs). At the same time parameters can be
transferred and/or variables described as well as opened in the FB or SFB associated local data
blocks (See: further reference function “Variable declaration in code blocks“). If no variables are
defined in the called block, then this operation corresponds to the operation UC.
STL
CALL FB1, DB20
IN := IW 1 IN (Formal parameter) assigned to IW 1 (Actual parameter).
OUT := OUT (Formal parameter) assigned to no parameter.
TEST := TEST (Formal parameter) assigned to no parameter.
LAD/FBD
2.16.2 CONDITIONAL CALL (CC)
With the block call CC you can call functions (FCs) and functional blocks (FBs) as well as system
functions (SFCs) and system function blocks (SFBs). However, they cannot transfer any
parameters and/or describe variables. The call is implemented only if the logical operation result
amounts to a “1“.
LAD/FBD STL
A I 0.0
I 0.0 FC 1 CC FC 1
| | (CALL)
Forward Program instructions
T I A Training document Page 27 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.16.3 UNCONDITIONAL CALL (UC)
With the module call UC, you can call functions (FCs) and functional blocks (FBs) as well as
system functions (SFCs) and system function blocks (SFBs). They can transfer however no
parameters and/or describe variables. The call is implemented independently from the logical
operation result.
LAD/FBD STL
UC FC 1
FC 1
(CALL)
2.16.4 OPEN A DATA BLOCK (OPN)
With the operation open data block (OPN), you can open a data block (DB) or instance -data block
(DI), in order to access the contained data (e.g. with load and transfer operations).
LAD/FBD STL
OPN DB 1
DB 1 L DBW 0
T MW 1
( OPN )
2.16.5 BLOCK END CONDITIONAL (BEC) ONLY IN STL
Depending on the logical operation result, this operation terminates the processing of the current
block and jumps back into the block that was previously called. This operation occurs only if the
logical operation result amounts to “1“.
STL
A I 0.0
BEC
Forward Program instructions
T I A Training document Page 28 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.16.6 BLOCK END UNCONDITIONAL (BEU) ONLY IN STL
This operation terminates the processing of the current block and jumps back into the previous
block. This operation occurs independently from the logical operation result.
STL
...(any statements)
BEU
Forward Program instructions
T I A Training document Page 29 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.17 JUMP OPERATIONS
2.17.1 JUMP UNCONDITIONAL (JU)
The operation JU interrupts the normal execution of the program and jumps to the branch label
indicated in the operand. The jump occurs independently from the logical operation result.
LAD/FBD STL
Network 1
Network 1
SUP
( JMP ) ...(any statements)
JU SUP
Network 4
Network 4
I 1.1 Q 4.1 SUP: U I 1.1
SUP
SUP: S Q 4.1
| | ( S )
2.17.2 JUMP IF RLO=1/RLO=0 (JC/JCN)
The conditioned jump operations interrupt the normal execution of the program and initiate a jump
to the branch label indicated in the operand. The jump takes place as a function of the logical
operation result. The following conditioned jump operations can be implemented:
• JC : Jump when RLO = 1
• JCN : Jump when RLO = 0
LAD/FBD STL
Network 1
Network 1
I 0.0 SUP1 A I 0.0
JC SUP1 (When RLO = 1)
| | ( JMP ) A I 0.0
SUP2 JCN SUP2 (When RLO = 0)
(JMPN) SUP1: Network 4
SUP1: A I 0.1
Network 4
S Q 4.1
SUP1 I 0.1 Q 4.1
SUP2: Network 8
| | ( S ) SUP2: A I 0.2
S Q 4.2
Network 8
SUP2 I 0.2 Q 4.2
| | ( S )
Forward Program instructions
T I A Training document Page 30 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.17.3 LOOP (LOOP) ONLY IN STL
With a program loop (LOOP), you can edit a program section several times. In addition you must
load a constant into the low order word from the ACCU 1. This number is then decreased by ‘1’ by
the operation LOOP. Afterwards the value of this number is examined for < > 0. If it does not
amount to ‘0’, then a jump is implemented to the label of the operation LOOP; otherwise the next
operation is implemented.
L 5
NEXT: T MB 10
L MB 10
LOOP NEXT
The program loop (LOOP) exists only in the programming language
STL.
2.18 NULL OPERATIONS
2.18.1 NULL OPERATION 0 / 1 (NOP 0/NOP 1) ONLY IN STL
These operations do not implement a function and do not affect contents of the status words. The
compiler needs the null operations for re-compilation, e.g. from STL into LAD.
Forward Program instructions
T I A Training document Page 31 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
2.19 PROCESSING OF THE RLO
In STEP 7 there are operations with which the logical operation result (RLO) can be altered. Since
the RLO is directly affected, these operations do not possess operands.
2.19.1 NEGATE RLO (NOT) ONLY IN STL
You can negate (return) the actual RLO in a program with the operation NOT. If the actual RLO is
‘0’, then the operation NOT changes it into ‘1’.
2.19.2 SET RLO (SET) ONLY IN STL
You can set the RLO-bit unconditionally to ‘1‘ in the program with the operation SET.
2.19.3 RESET RLO (CLR) ONLY IN STL
You can reset the RLO-bit unconditionally to ‘0‘ in the program with the operation CLR.
2.19.4 SAVE RLO (SAVE) ONLY IN STL
You can save the RLO for future use in the status bit (BR) of the status word in the program with
the operation SAVE.
The status word contains bits, which you can access in the operand of the
bit and word logical operations.
BR CC1 CC0 OV OS OR STA RLO /FC
e.g.: Bit8 Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
Statement list: Signal state: Logical operation result(RLO):
SET 1
= M 1.0 1
= I 0.0 1
CLR 0
= M 1.0 0
= I 0.0 0
NOT 1
SAVE 1 save in BR- Bit in the status word
Forward Program instructions
T I A Training document Page 32 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
Automation– and Drive Technology- SCE
Forward Program instructions
T I A Training document Page 33 of 32 Appendix III
Last revision: 02/2002 Basic programming operations LAD/FBD/STL in STEP 7
S-ar putea să vă placă și
- Process Simulate ABB Controller: Siemens Siemens SiemensDocument16 paginiProcess Simulate ABB Controller: Siemens Siemens SiemensBruno FreitasÎncă nu există evaluări
- The Lucid Dream Exchange Magazine Issue 36Document36 paginiThe Lucid Dream Exchange Magazine Issue 36api-384230967% (3)
- MotoSimEG Manual en 06Document342 paginiMotoSimEG Manual en 06jon6101Încă nu există evaluări
- Global 2 Tip Dress Setup Users Manual For 7.5 REV 1.0Document40 paginiGlobal 2 Tip Dress Setup Users Manual For 7.5 REV 1.0zganonÎncă nu există evaluări
- Et200sp Di 16x24vdc ST Manual en-US en-USDocument31 paginiEt200sp Di 16x24vdc ST Manual en-US en-USQuy HoangÎncă nu există evaluări
- MT45115 S 1512 PresentationDocument1.284 paginiMT45115 S 1512 PresentationDébora CristinaÎncă nu există evaluări
- Release Notes RobotStudio 2019-5 PDFDocument44 paginiRelease Notes RobotStudio 2019-5 PDFXanti Zabala Da RosaÎncă nu există evaluări
- Basler Ace GigE Users ManualDocument360 paginiBasler Ace GigE Users ManualAyan Ghosh100% (1)
- Process Simulate Training DAYS4 5 Version 12.1.3Document83 paginiProcess Simulate Training DAYS4 5 Version 12.1.3BOULAL MEDÎncă nu există evaluări
- XXXXXDocument38 paginiXXXXXGarrett HughesÎncă nu există evaluări
- YuMi Presentacion PDFDocument47 paginiYuMi Presentacion PDFLily ParadaÎncă nu există evaluări
- 3HAC032104-En (Robot Studio Manual)Document594 pagini3HAC032104-En (Robot Studio Manual)jaschaÎncă nu există evaluări
- Kuka Profinet CP 1616: Kuka Robot Group Controller OptionDocument55 paginiKuka Profinet CP 1616: Kuka Robot Group Controller OptionshrusÎncă nu există evaluări
- Rexroth Weld Tech Repair Process Overview PSI6XXX - XXX PlatformDocument10 paginiRexroth Weld Tech Repair Process Overview PSI6XXX - XXX PlatformBobyÎncă nu există evaluări
- 3HAC028509-001 Rev - enDocument34 pagini3HAC028509-001 Rev - enRoberto VillegasÎncă nu există evaluări
- Solve, The Mckinsey GameDocument47 paginiSolve, The Mckinsey GamesjÎncă nu există evaluări
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionDe la EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionÎncă nu există evaluări
- KUKA KR C4 Assembly and Operating Instructions GuideDocument33 paginiKUKA KR C4 Assembly and Operating Instructions GuideArturo PuenteÎncă nu există evaluări
- Electronic Position Switches - Application Manual - ABB RoboticsDocument84 paginiElectronic Position Switches - Application Manual - ABB RoboticsPrabhu100% (2)
- S7-200 Programmable Controller - Step 7 Micro WinDocument482 paginiS7-200 Programmable Controller - Step 7 Micro Winapi-3704887100% (2)
- KR C4 PROFIBUS KSS VSS 85 86 enDocument57 paginiKR C4 PROFIBUS KSS VSS 85 86 enshrusÎncă nu există evaluări
- Ba - CP 1616 CP 1604 - 76Document46 paginiBa - CP 1616 CP 1604 - 76mÎncă nu există evaluări
- IV Field BusDocument65 paginiIV Field BusvarunshyamÎncă nu există evaluări
- Training Document For The Company-Wide Automation Solution Totally Integrated Automation (T I A)Document20 paginiTraining Document For The Company-Wide Automation Solution Totally Integrated Automation (T I A)varunshyamÎncă nu există evaluări
- Application Manual: Servo Gun SetupDocument82 paginiApplication Manual: Servo Gun SetupLuis ClaudioÎncă nu există evaluări
- Off-Line Programming Techniques For Multirobot Cooperation SystemDocument17 paginiOff-Line Programming Techniques For Multirobot Cooperation SystemShaw MxÎncă nu există evaluări
- WKP115S Activities PDFDocument424 paginiWKP115S Activities PDFh_eijy2743Încă nu există evaluări
- PDC350G - Service Part ListDocument56 paginiPDC350G - Service Part ListhanafisuhaimiÎncă nu există evaluări
- Siemens FM352-5Document246 paginiSiemens FM352-5Nguyen Le Thanh VuÎncă nu există evaluări
- Robcad BrochureDocument4 paginiRobcad BrochureWesley SaidÎncă nu există evaluări
- ABB Robotics. Operating Manual Seam Tracking With Weldguide and MultiPassDocument102 paginiABB Robotics. Operating Manual Seam Tracking With Weldguide and MultiPassluisMaciasCATÎncă nu există evaluări
- Application Manual (Flexpendant SDK)Document220 paginiApplication Manual (Flexpendant SDK)Herminio Gómez100% (1)
- RobotComms Fanuc v1Document19 paginiRobotComms Fanuc v1Adriana Salazar0% (1)
- b04 Data BlocksDocument18 paginib04 Data BlocksvarunshyamÎncă nu există evaluări
- RobowareDocument442 paginiRobowareRui LopesÎncă nu există evaluări
- Interbus Ibs CMD g4Document408 paginiInterbus Ibs CMD g4pinguinofiestero100% (1)
- KST CR Motion Cooperation 22 enDocument147 paginiKST CR Motion Cooperation 22 enMindaugas RimkusÎncă nu există evaluări
- Operating Manual - Robot Studio 5.14Document520 paginiOperating Manual - Robot Studio 5.14Thuy Vo CongÎncă nu există evaluări
- RMR DOKU V20 E LDocument133 paginiRMR DOKU V20 E LAbez Five100% (1)
- CAD SetupInstallation GuideDocument48 paginiCAD SetupInstallation GuideXi GuoÎncă nu există evaluări
- DX100 Instruction ManualDocument270 paginiDX100 Instruction Manualalan_smoÎncă nu există evaluări
- DCS - User - Manual - En-Just Connections ExampleDocument13 paginiDCS - User - Manual - En-Just Connections Exampleretox9000Încă nu există evaluări
- KUKA OfficeLite 82 enDocument39 paginiKUKA OfficeLite 82 enaugusto_1956Încă nu există evaluări
- Tia Portal V13 Keyboard ShortcutsDocument8 paginiTia Portal V13 Keyboard ShortcutsErnesto Nestum MendesÎncă nu există evaluări
- Et200sp Im 155 6 PN ST Manual en-US en-USDocument62 paginiEt200sp Im 155 6 PN ST Manual en-US en-USPhilÎncă nu există evaluări
- KST GripperSpotTech 31 en PDFDocument53 paginiKST GripperSpotTech 31 en PDFfaspÎncă nu există evaluări
- #1. SmartStruxure Lite Training - Introduction Ver 1.1.0 - 0Document55 pagini#1. SmartStruxure Lite Training - Introduction Ver 1.1.0 - 0cosmin_butanescuÎncă nu există evaluări
- Robot Studio Operating Manual PDFDocument288 paginiRobot Studio Operating Manual PDFKhang Nguyen0% (1)
- Siemens PLM Tecnomatix Digital Manufacturing For Trace Ability WP Tcm73 4931Document10 paginiSiemens PLM Tecnomatix Digital Manufacturing For Trace Ability WP Tcm73 4931adi20019Încă nu există evaluări
- Ba KR 16 Arc HW enDocument207 paginiBa KR 16 Arc HW enBerkanBağÎncă nu există evaluări
- Integration of KUKA KR16 Robot and Siemens PLC, CPU315-2DP PDFDocument20 paginiIntegration of KUKA KR16 Robot and Siemens PLC, CPU315-2DP PDFTrungÎncă nu există evaluări
- Milling Robot 03 enDocument88 paginiMilling Robot 03 enM12N70% (1)
- Delmia From DSDocument3 paginiDelmia From DSJhhen B. ChoudharyÎncă nu există evaluări
- KST ConveyorTech 71 enDocument108 paginiKST ConveyorTech 71 enphong viÎncă nu există evaluări
- Install KUKA - Sim 2.1 enDocument11 paginiInstall KUKA - Sim 2.1 enpepeÎncă nu există evaluări
- Ultra 3000 Integration ManualDocument180 paginiUltra 3000 Integration ManualdjtremorzÎncă nu există evaluări
- FD Controller Instruction Manual Palletize Function: 5th EditionDocument112 paginiFD Controller Instruction Manual Palletize Function: 5th EditionrmlÎncă nu există evaluări
- X2C Servo Gun: - A New Generation of Modular Welding GunDocument5 paginiX2C Servo Gun: - A New Generation of Modular Welding GunRoshin RajÎncă nu există evaluări
- Embedded Hypervisor The Ultimate Step-By-Step GuideDe la EverandEmbedded Hypervisor The Ultimate Step-By-Step GuideÎncă nu există evaluări
- CANopen Master For S7-1200-3263-CM CANopen - User ManualDocument68 paginiCANopen Master For S7-1200-3263-CM CANopen - User ManualvarunshyamÎncă nu există evaluări
- End User License Agreement For Android Mobile Applications: Free of Charge and Commercial VersionsDocument3 paginiEnd User License Agreement For Android Mobile Applications: Free of Charge and Commercial VersionsvarunshyamÎncă nu există evaluări
- 479-0244-Anybus Communicator CAN PROFINET-IO User ManualDocument89 pagini479-0244-Anybus Communicator CAN PROFINET-IO User ManualvarunshyamÎncă nu există evaluări
- BC Hmi Ce Manual Umsw01fDocument143 paginiBC Hmi Ce Manual Umsw01fvarunshyamÎncă nu există evaluări
- Data LoggingDocument18 paginiData LoggingvarunshyamÎncă nu există evaluări
- Air BoosterDocument8 paginiAir BoostervarunshyamÎncă nu există evaluări
- S7 - Standard FunctionsDocument756 paginiS7 - Standard FunctionsAkram SayeedÎncă nu există evaluări
- b04 Data BlocksDocument18 paginib04 Data BlocksvarunshyamÎncă nu există evaluări
- Relationship Between TorqueDocument3 paginiRelationship Between Torquevarunshyam100% (1)
- Training Document For The Company-Wide Automation Solution Totally Integrated Automation (T I A)Document18 paginiTraining Document For The Company-Wide Automation Solution Totally Integrated Automation (T I A)varunshyamÎncă nu există evaluări
- 3.0 Momentum Catalog July02Document100 pagini3.0 Momentum Catalog July02varunshyamÎncă nu există evaluări
- Master CPU 315-2Dp Slave ET200MDocument20 paginiMaster CPU 315-2Dp Slave ET200MSamehibrahemÎncă nu există evaluări
- 6.0 Zelio Smart Relay - PLCDocument27 pagini6.0 Zelio Smart Relay - PLCvarunshyamÎncă nu există evaluări
- TwidoSoft - UntitledDocument1 paginăTwidoSoft - UntitledvarunshyamÎncă nu există evaluări
- ADDCDocument1 paginăADDCvarunshyamÎncă nu există evaluări
- Operator Dialogue Terminals: Selection GuideDocument22 paginiOperator Dialogue Terminals: Selection GuidevarunshyamÎncă nu există evaluări
- Hechethorn - The Secret Societies of All Ages and Countries, Vol. I (1875) PDFDocument417 paginiHechethorn - The Secret Societies of All Ages and Countries, Vol. I (1875) PDFsongpoetÎncă nu există evaluări
- Innovation Corrupted The Rise and Fall of EnronDocument4 paginiInnovation Corrupted The Rise and Fall of EnronPratyaksh SehgalÎncă nu există evaluări
- PizzaOrder Assignment Working CodingDocument3 paginiPizzaOrder Assignment Working CodinginpreetkÎncă nu există evaluări
- APPELANTDocument30 paginiAPPELANTTAS MUNÎncă nu există evaluări
- Elec Final OutputDocument3 paginiElec Final Outputluebert kunÎncă nu există evaluări
- Fundamentals of Parenteral NutritionDocument4 paginiFundamentals of Parenteral NutritionankammaraoÎncă nu există evaluări
- Additive ManufactDocument61 paginiAdditive ManufactAnca Maria TruscaÎncă nu există evaluări
- 1927 To 1939 New PDFDocument8 pagini1927 To 1939 New PDFahmed razaÎncă nu există evaluări
- Cristoforo BuondelmontiDocument15 paginiCristoforo BuondelmontiAnna AchiolaÎncă nu există evaluări
- Police Law EnforcementDocument4 paginiPolice Law EnforcementSevilla JoenardÎncă nu există evaluări
- IEEE Romania SectionDocument14 paginiIEEE Romania SectionLucian TomaÎncă nu există evaluări
- IdentifyDocument40 paginiIdentifyLeonard Kenshin LianzaÎncă nu există evaluări
- Lesson Plan 9th Grade ScienceDocument2 paginiLesson Plan 9th Grade Scienceapi-316973807Încă nu există evaluări
- The Philippine Diary ProjectDocument37 paginiThe Philippine Diary ProjectLilibeth OchiaÎncă nu există evaluări
- 16 Leases (Lessee) s19 FinalDocument35 pagini16 Leases (Lessee) s19 FinalNosipho NyathiÎncă nu există evaluări
- Chraj 1Document6 paginiChraj 1The Independent GhanaÎncă nu există evaluări
- Software Engineering - Legacy SoftwareDocument9 paginiSoftware Engineering - Legacy SoftwaresanthoshthefunÎncă nu există evaluări
- Motor-Catalog English 2013 PDFDocument80 paginiMotor-Catalog English 2013 PDFILham Dwi PutraÎncă nu există evaluări
- Safety Competency TrainingDocument21 paginiSafety Competency TrainingsemajamesÎncă nu există evaluări
- My Home Is My CastleDocument9 paginiMy Home Is My CastleNur ZhanÎncă nu există evaluări
- FSR 3.0 Frame Generation Mod Test Status (By LukeFZ)Document10 paginiFSR 3.0 Frame Generation Mod Test Status (By LukeFZ)Gabriel GonçalvesÎncă nu există evaluări
- DerivativeDocument29 paginiDerivativeMohit AggarwalÎncă nu există evaluări
- Inside The Mind of A Master ProcrastinatorDocument5 paginiInside The Mind of A Master ProcrastinatorDianaÎncă nu există evaluări
- Financial Proposal: Cost Summaries For Installation of PV Power SystemsDocument16 paginiFinancial Proposal: Cost Summaries For Installation of PV Power SystemsSamuel AbebawÎncă nu există evaluări
- Am No. 98-5-01-SC, Nov 9 1998 in Re Hon Mateo ValenzuelaDocument9 paginiAm No. 98-5-01-SC, Nov 9 1998 in Re Hon Mateo Valenzuelaian clark MarinduqueÎncă nu există evaluări
- Samsung Galaxy Beam GT I8530 User ManualDocument172 paginiSamsung Galaxy Beam GT I8530 User ManualFirdaus AhmadÎncă nu există evaluări
- Quiz 4Document5 paginiQuiz 4Diegiitho Acevedo MartiinezÎncă nu există evaluări