S-ar putea să vă placă și
- Hybrid Electric Vehicles: Principles and Applications with Practical PerspectivesDe la EverandHybrid Electric Vehicles: Principles and Applications with Practical PerspectivesÎncă nu există evaluări
- SuspensionDocument59 paginiSuspensionSuhas KarajgarÎncă nu există evaluări
- Power Electronics and Electric Drives for Traction ApplicationsDe la EverandPower Electronics and Electric Drives for Traction ApplicationsÎncă nu există evaluări
- Automotive Suspension SystemsDocument72 paginiAutomotive Suspension SystemsRiaBediÎncă nu există evaluări
- Fully Autonomous Vehicles: Visions of the future or still reality?De la EverandFully Autonomous Vehicles: Visions of the future or still reality?Încă nu există evaluări
- 8.0 Brake by Wire Ja505Document16 pagini8.0 Brake by Wire Ja505Nareesh RajÎncă nu există evaluări
- Understanding The Limitations of Different Vehicle Models For Roll Dynamics StudiesDocument27 paginiUnderstanding The Limitations of Different Vehicle Models For Roll Dynamics StudiesAntonio Navarrete0% (1)
- DamperDocument52 paginiDampergnaniofs3960Încă nu există evaluări
- Abs TCS EbdDocument15 paginiAbs TCS EbdNB Huy100% (1)
- Active Control of Quarter Car Suspension System UsDocument10 paginiActive Control of Quarter Car Suspension System UsFaris HadiyantoÎncă nu există evaluări
- HowStuffWorks - Benefits of Hill-Start ControlDocument3 paginiHowStuffWorks - Benefits of Hill-Start ControlfrapedÎncă nu există evaluări
- Suspension Control SystemsDocument39 paginiSuspension Control SystemsKRISHNAPRIYAÎncă nu există evaluări
- Abuki Anti Lock Braking SystemDocument20 paginiAbuki Anti Lock Braking SystemAbubaker MuzayinÎncă nu există evaluări
- Regenerative Braking SystemDocument15 paginiRegenerative Braking SystemVinay KumarÎncă nu există evaluări
- មេរៀន ប្រព័ន្ធហ្វ្រាំង ABSDocument26 paginiមេរៀន ប្រព័ន្ធហ្វ្រាំង ABSYon ChhannakÎncă nu există evaluări
- Anti Lock Brakes ReportDocument23 paginiAnti Lock Brakes Reportjyoti ranjan nayak90% (10)
- Vehicle Suspension DesignDocument63 paginiVehicle Suspension DesignVenkatesh ChegireddyÎncă nu există evaluări
- Suspension SystemsDocument118 paginiSuspension SystemsEZHILARASAN R100% (1)
- Double WishboneDocument6 paginiDouble WishboneRian SteveÎncă nu există evaluări
- Automatic Air Suspension SystemDocument17 paginiAutomatic Air Suspension Systemmonikaneha123100% (1)
- Transmission (Mechanics) PDFDocument11 paginiTransmission (Mechanics) PDFFrancisco Botella JuanÎncă nu există evaluări
- Suspension SystemsDocument23 paginiSuspension SystemsEngr Mansoor AhmadÎncă nu există evaluări
- Ch-10-Steering and Front AxleDocument45 paginiCh-10-Steering and Front Axlekeval patel100% (2)
- Vehicle Suspension Modeling NotesDocument25 paginiVehicle Suspension Modeling Notesahmetlutfu100% (2)
- Chapter 6 - Suspension SystemDocument13 paginiChapter 6 - Suspension SystemLalith Koushik GanganapalliÎncă nu există evaluări
- Modern Brake SystemDocument24 paginiModern Brake Systemfadhilah91Încă nu există evaluări
- Regenerative Braking SystemDocument10 paginiRegenerative Braking SystemDanielDavidSitompulÎncă nu există evaluări
- Brake by Wire SystemsDocument16 paginiBrake by Wire Systemsdevhx86% (7)
- Auto Transmission - NotesDocument34 paginiAuto Transmission - Notesvandanaharikumar100% (2)
- Vehicle Dynamics ProDocument15 paginiVehicle Dynamics ProChirag D PatelÎncă nu există evaluări
- Vehicle Roll EstimatorDocument10 paginiVehicle Roll EstimatorRaja Amer AzimÎncă nu există evaluări
- Modelling Simulation and Control of An Active Suspension SystemDocument10 paginiModelling Simulation and Control of An Active Suspension SystemIAEME PublicationÎncă nu există evaluări
- Mild Hybrid Electric Vehicle (MHEV) - ArchitecturesDocument9 paginiMild Hybrid Electric Vehicle (MHEV) - ArchitecturesRui MendesÎncă nu există evaluări
- Automobile Braking SystemDocument28 paginiAutomobile Braking SystemAli Mohammed Ali AhmedÎncă nu există evaluări
- Electronic Stability Control SystemDocument17 paginiElectronic Stability Control SystemTushar Kadu100% (1)
- Half Car Vehicle Suspension System Using Fuzzy Logic ControllerDocument94 paginiHalf Car Vehicle Suspension System Using Fuzzy Logic Controllerkeval patelÎncă nu există evaluări
- SSP 275 Phaeton Air SuspensionDocument17 paginiSSP 275 Phaeton Air Suspensionภูเก็ต เป็นเกาะÎncă nu există evaluări
- Analysis of Automobile SuspensionDocument13 paginiAnalysis of Automobile SuspensionAfeez AzizÎncă nu există evaluări
- Vehicle Active SuspensionDocument9 paginiVehicle Active SuspensionVivekDhameliya100% (1)
- Vehicle Dynamics TheoryAJM PDFDocument126 paginiVehicle Dynamics TheoryAJM PDFSrinivasarao YenigallaÎncă nu există evaluări
- Car Suspension ModelingDocument27 paginiCar Suspension ModelingAndrés Barón100% (1)
- Active Suspension: Presented by XXXXXXXDocument29 paginiActive Suspension: Presented by XXXXXXXGaurav KumarÎncă nu există evaluări
- Suspension Analysis PDFDocument5 paginiSuspension Analysis PDFramsaiÎncă nu există evaluări
- Mac Pherson StrutDocument7 paginiMac Pherson StrutNitin VarmanÎncă nu există evaluări
- MPC Based Yaw and Lateral Stabilisation Via Active Front Steering and Braking PDFDocument19 paginiMPC Based Yaw and Lateral Stabilisation Via Active Front Steering and Braking PDFKiran KoneÎncă nu există evaluări
- Torsen Traction Differential Technical SheetDocument2 paginiTorsen Traction Differential Technical SheetwadafackaÎncă nu există evaluări
- AbsDocument30 paginiAbsEhtishaam AbbasÎncă nu există evaluări
- Simulation of Passive and Active SuspensionDocument9 paginiSimulation of Passive and Active SuspensionAshish Parihar100% (1)
- 253 Suspension Calc ExplainedDocument1 pagină253 Suspension Calc ExplainedholaqÎncă nu există evaluări
- The Sharan 2011 Electrics/Electronics Design and Function: Service TrainingDocument40 paginiThe Sharan 2011 Electrics/Electronics Design and Function: Service Traininggeorgescurios100% (1)
- Active Suspension SeminarDocument12 paginiActive Suspension Seminarmujeeb0% (1)
- 4 Independed Suspension System 160217041633Document15 pagini4 Independed Suspension System 160217041633Aditya R BharadwajÎncă nu există evaluări
- Suspension System in AutomobilesDocument26 paginiSuspension System in AutomobilesAzher UddinÎncă nu există evaluări
- Suspension System in AutomobilesDocument26 paginiSuspension System in AutomobilesAjay Singh BhadoriaÎncă nu există evaluări
- Editors' Perspectives:: Road Vehicle Suspension Design, Dynamics, and ControlDocument34 paginiEditors' Perspectives:: Road Vehicle Suspension Design, Dynamics, and ControlTech DudeÎncă nu există evaluări
- HevDocument14 paginiHevjungdjudfÎncă nu există evaluări
- Traction Control SystemDocument4 paginiTraction Control Systemzeeshanahmad111100% (1)
- Drone CompleteDocument13 paginiDrone CompleteAdhwareshBharadwajÎncă nu există evaluări
- Data Dictionary - Release 7.1Document869 paginiData Dictionary - Release 7.1Prasad BillahalliÎncă nu există evaluări
- Disclosure MGMT User 1112300 PDFDocument152 paginiDisclosure MGMT User 1112300 PDFPrasad BillahalliÎncă nu există evaluări
- OFSAAI Installation Guide 8.0.1.2.0Document16 paginiOFSAAI Installation Guide 8.0.1.2.0Prasad BillahalliÎncă nu există evaluări
- OFSAAI Installation Guide 8.0.1.2.0Document8 paginiOFSAAI Installation Guide 8.0.1.2.0Prasad BillahalliÎncă nu există evaluări
- OFS Basel Regulatory Capital Basic 6.0.0.0.0 Admin Guide PDFDocument26 paginiOFS Basel Regulatory Capital Basic 6.0.0.0.0 Admin Guide PDFPrasad BillahalliÎncă nu există evaluări
- OFS Basel Regulatory Capital Basic 6.0.0.0.0 Admin Guide PDFDocument26 paginiOFS Basel Regulatory Capital Basic 6.0.0.0.0 Admin Guide PDFPrasad BillahalliÎncă nu există evaluări
- OFSAAI Installation Guide 8.0.1.2.0Document8 paginiOFSAAI Installation Guide 8.0.1.2.0Prasad BillahalliÎncă nu există evaluări
- Disclosure MGMT User 1112300 PDFDocument152 paginiDisclosure MGMT User 1112300 PDFPrasad BillahalliÎncă nu există evaluări
- 00RD CourseIntroduction PDFDocument12 pagini00RD CourseIntroduction PDFPrasad BillahalliÎncă nu există evaluări
- Ifrs 9 Implementation Methodology Guidebook FinalDocument14 paginiIfrs 9 Implementation Methodology Guidebook FinalPrasad BillahalliÎncă nu există evaluări
- OFSAAI Forms Manager User GuideDocument128 paginiOFSAAI Forms Manager User GuidePrasad BillahalliÎncă nu există evaluări
- Oracle Datapump 11g Quickstart - 128718Document12 paginiOracle Datapump 11g Quickstart - 128718jmla69Încă nu există evaluări
- Ifrs9 0916Document36 paginiIfrs9 0916Prasad BillahalliÎncă nu există evaluări
- Cfo Ebrief Ifrs9 p3 3319995Document12 paginiCfo Ebrief Ifrs9 p3 3319995Prasad BillahalliÎncă nu există evaluări
- Types of RiskDocument3 paginiTypes of RisknirmaldevalÎncă nu există evaluări
- InstallGuide FTP61Document48 paginiInstallGuide FTP61Prasad BillahalliÎncă nu există evaluări
- Risk Management - 2Document53 paginiRisk Management - 2Pravin LakudzodeÎncă nu există evaluări
- DMR Ofsrr 2.5.6Document122 paginiDMR Ofsrr 2.5.6Prasad BillahalliÎncă nu există evaluări
- DRM - OfSAA Interface User GuideDocument17 paginiDRM - OfSAA Interface User GuidePrasad BillahalliÎncă nu există evaluări
- Qual CheckDocument32 paginiQual CheckVishnu Vardhan100% (1)
- OFSAAI 7.3.3.0.0 User ManualDocument11 paginiOFSAAI 7.3.3.0.0 User ManualPrasad BillahalliÎncă nu există evaluări
- OBIEE11g Deployment & Change Management Best PracticesDocument35 paginiOBIEE11g Deployment & Change Management Best PracticesPrasad BillahalliÎncă nu există evaluări
- Branch Profitability Measurement An Improved FrameworkDocument8 paginiBranch Profitability Measurement An Improved FrameworkPrasad BillahalliÎncă nu există evaluări
- Exploiting Big Data: Strategies For Integrating With Hadoop To Deliver Business InsightsDocument35 paginiExploiting Big Data: Strategies For Integrating With Hadoop To Deliver Business InsightsPrasad BillahalliÎncă nu există evaluări
- Hyperion Essbase BasicsDocument14 paginiHyperion Essbase BasicsAmit Sharma100% (1)
- Exploiting Big Data: Strategies For Integrating With Hadoop To Deliver Business InsightsDocument35 paginiExploiting Big Data: Strategies For Integrating With Hadoop To Deliver Business InsightsPrasad BillahalliÎncă nu există evaluări
- SREE NILAYAM Ramamurthi NagarDocument6 paginiSREE NILAYAM Ramamurthi NagarPrasad BillahalliÎncă nu există evaluări
- Profitability Manager ERD 11i10 (A)Document1 paginăProfitability Manager ERD 11i10 (A)Prasad BillahalliÎncă nu există evaluări
- Odi 11115 New Features Overview WP 394851Document10 paginiOdi 11115 New Features Overview WP 394851Kevin ChuÎncă nu există evaluări
- Twin Clutch TransmissionDocument237 paginiTwin Clutch TransmissionAkash Mankar100% (1)
- Menghitung Minimum Bollard PullDocument2 paginiMenghitung Minimum Bollard PullWilly SastraleksanaÎncă nu există evaluări
- Malta: Approved Port Facilities in MaltaDocument1 paginăMalta: Approved Port Facilities in MaltaCohal FlorinÎncă nu există evaluări
- Worksheet Titanic Python PDFDocument8 paginiWorksheet Titanic Python PDFrashmimehÎncă nu există evaluări
- UIC Codex 779 9eDocument68 paginiUIC Codex 779 9eMiguel ParÎncă nu există evaluări
- Grade 12 Eapp Lesson 3 Quarter 1Document12 paginiGrade 12 Eapp Lesson 3 Quarter 1Maria Cecilia Loristo0% (1)
- CMR - ModelDocument4 paginiCMR - ModelMariana Vitan64% (11)
- Manual Do Fis Jit VWDocument23 paginiManual Do Fis Jit VWJose Augusto Santos NetoÎncă nu există evaluări
- ME 2010 04 Vehicle Front-End Active AerodynamicsDocument6 paginiME 2010 04 Vehicle Front-End Active AerodynamicsAsha DashÎncă nu există evaluări
- Test Bank For Biology The Unity and Diversity of Life 12th EditionDocument34 paginiTest Bank For Biology The Unity and Diversity of Life 12th Editionoscines.filicide.qzie100% (41)
- Cursed (2nd Draft)Document119 paginiCursed (2nd Draft)Scream-Thrillogy.comÎncă nu există evaluări
- Chittagong Agent ListDocument11 paginiChittagong Agent ListMuhammad0% (2)
- La Razon Social vs. Union Insurance Society of Canton, Ltd. G.R. No. 13983 September 1, 1919 (Perils of The Sea vs. Perils of The Ship) FactsDocument1 paginăLa Razon Social vs. Union Insurance Society of Canton, Ltd. G.R. No. 13983 September 1, 1919 (Perils of The Sea vs. Perils of The Ship) FactsSALMAN JOHAYRÎncă nu există evaluări
- FedEx WebServices DevelopersGuideDocument767 paginiFedEx WebServices DevelopersGuideSantosh TelawaneÎncă nu există evaluări
- LogisticsDocument7 paginiLogisticsNguyễn Thị Thảo VyÎncă nu există evaluări
- Judging Ayodhya: Book ReviewsDocument79 paginiJudging Ayodhya: Book ReviewsUjjwal DixitÎncă nu există evaluări
- Platform Brand - AlbumDocument25 paginiPlatform Brand - AlbumSimon GlennÎncă nu există evaluări
- Kerem David ENGDocument46 paginiKerem David ENGאר מסÎncă nu există evaluări
- Rs 245 CR To Revive Thirumazhisai Township ProjectDocument3 paginiRs 245 CR To Revive Thirumazhisai Township ProjectAr Karthikeyan TamizhÎncă nu există evaluări
- West Tower vs. Phil. Ind. Corp.Document14 paginiWest Tower vs. Phil. Ind. Corp.Antonio Dominic SalvadorÎncă nu există evaluări
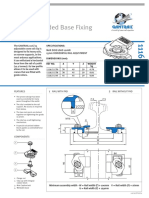
- Gantrail Welded Base Fixing: SpecificationsDocument2 paginiGantrail Welded Base Fixing: SpecificationstobiasÎncă nu există evaluări
- 8frba SeriesDocument2 pagini8frba Seriesargo kuncahyoÎncă nu există evaluări
- Checklist For Inspection of Bridges by Bridge Line UnitsDocument3 paginiChecklist For Inspection of Bridges by Bridge Line UnitsSSE Bridge SSBÎncă nu există evaluări
- History of Skid RowDocument17 paginiHistory of Skid RowkatherinetreesÎncă nu există evaluări
- Affirmations For Defensive DrivingDocument2 paginiAffirmations For Defensive DrivingManju KrushnaÎncă nu există evaluări
- Alfa RomeoDocument12 paginiAlfa RomeoVidysagar Vvec100% (1)
- Tourism Marketing As Promotion of Tourism in Himachal PradeshDocument24 paginiTourism Marketing As Promotion of Tourism in Himachal PradeshRakesh KumarÎncă nu există evaluări
- Incoterms 2012Document60 paginiIncoterms 2012roberts79Încă nu există evaluări
- Highways, Local Economic Structure and Urban DevelopmentDocument20 paginiHighways, Local Economic Structure and Urban DevelopmentAndika AhsanaÎncă nu există evaluări
- Ansi Atex LR CompleteDocument146 paginiAnsi Atex LR CompletePedro SanchezÎncă nu există evaluări
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDe la EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindÎncă nu există evaluări
- Rules of Thumb for Maintenance and Reliability EngineersDe la EverandRules of Thumb for Maintenance and Reliability EngineersEvaluare: 4.5 din 5 stele4.5/5 (12)
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureDe la EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureEvaluare: 4.5 din 5 stele4.5/5 (2)
- A Welder’s Handbook to Robotic ProgrammingDe la EverandA Welder’s Handbook to Robotic ProgrammingEvaluare: 5 din 5 stele5/5 (3)
- A Complete Guide to Safety Officer Interview Questions and AnswersDe la EverandA Complete Guide to Safety Officer Interview Questions and AnswersEvaluare: 4 din 5 stele4/5 (1)
- Functional Safety from Scratch: A Practical Guide to Process Industry ApplicationsDe la EverandFunctional Safety from Scratch: A Practical Guide to Process Industry ApplicationsÎncă nu există evaluări
- Guidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisDe la EverandGuidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisEvaluare: 5 din 5 stele5/5 (1)
- Artificial Intelligence: From Medieval Robots to Neural NetworksDe la EverandArtificial Intelligence: From Medieval Robots to Neural NetworksEvaluare: 4 din 5 stele4/5 (4)
- Guidelines for Auditing Process Safety Management SystemsDe la EverandGuidelines for Auditing Process Safety Management SystemsÎncă nu există evaluări
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!De la EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Evaluare: 4 din 5 stele4/5 (3)
- Workbook to Accompany Maintenance & Reliability Best PracticesDe la EverandWorkbook to Accompany Maintenance & Reliability Best PracticesEvaluare: 3.5 din 5 stele3.5/5 (3)
- The Heart and the Chip: Our Bright Future with RobotsDe la EverandThe Heart and the Chip: Our Bright Future with RobotsÎncă nu există evaluări
- Fire Fighting Pumping Systems at Industrial FacilitiesDe la EverandFire Fighting Pumping Systems at Industrial FacilitiesEvaluare: 4.5 din 5 stele4.5/5 (3)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.De la EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Evaluare: 4 din 5 stele4/5 (5)
- Introduction to Petroleum Process SafetyDe la EverandIntroduction to Petroleum Process SafetyEvaluare: 3 din 5 stele3/5 (2)
- Evil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityDe la EverandEvil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityEvaluare: 4.5 din 5 stele4.5/5 (3)
- Dark Aeon: Transhumanism and the War Against HumanityDe la EverandDark Aeon: Transhumanism and the War Against HumanityEvaluare: 5 din 5 stele5/5 (1)
- Healthy Buildings: How Indoor Spaces Drive Performance and ProductivityDe la EverandHealthy Buildings: How Indoor Spaces Drive Performance and ProductivityEvaluare: 5 din 5 stele5/5 (2)
- Fundamentals of Risk Management for Process Industry EngineersDe la EverandFundamentals of Risk Management for Process Industry EngineersÎncă nu există evaluări
- Romantic Automata: Exhibitions, Figures, OrganismsDe la EverandRomantic Automata: Exhibitions, Figures, OrganismsÎncă nu există evaluări
- Handbook of Hazardous Chemical PropertiesDe la EverandHandbook of Hazardous Chemical PropertiesEvaluare: 5 din 5 stele5/5 (1)