S-ar putea să vă placă și
- Accident-Statistics,-Buzzer-During-Any-Accident DOCUMENTATIONDocument13 paginiAccident-Statistics,-Buzzer-During-Any-Accident DOCUMENTATIONsaikumar0% (1)
- Project Robo 1Document25 paginiProject Robo 1wasifazimÎncă nu există evaluări
- Human Detection Robot DetailsDocument6 paginiHuman Detection Robot DetailschirayilrichardÎncă nu există evaluări
- Guid - Volume Atenuator and Source SelectionDocument23 paginiGuid - Volume Atenuator and Source SelectionDementia AlexÎncă nu există evaluări
- IR Transmitter and Receiver Circuit DiagramDocument21 paginiIR Transmitter and Receiver Circuit DiagramAndy ZhuÎncă nu există evaluări
- War Field Spying Robot With Night Vision Wireless Camera: Submitted byDocument26 paginiWar Field Spying Robot With Night Vision Wireless Camera: Submitted byankita dhengaleÎncă nu există evaluări
- DRM Receptor EspetacularDocument13 paginiDRM Receptor Espetacularlivre130Încă nu există evaluări
- Hand Gesture Control Robot PDFDocument3 paginiHand Gesture Control Robot PDFMd IrfanÎncă nu există evaluări
- Cell Phone DetectorDocument5 paginiCell Phone DetectorLarry DanganÎncă nu există evaluări
- IR Remote Control Extender Circuit GuideDocument4 paginiIR Remote Control Extender Circuit GuideAhmedÎncă nu există evaluări
- 5 6066828862526850364Document24 pagini5 6066828862526850364Vivek Kalpana Laxman NarsaleÎncă nu există evaluări
- Thesis Report FinalDocument25 paginiThesis Report FinalThanhha Nguyen100% (2)
- Mobile DetectorDocument10 paginiMobile Detectorvikky8520Încă nu există evaluări
- Only CH 3Document15 paginiOnly CH 3mnotcoolÎncă nu există evaluări
- Mobile Sniffer: D. Mohan KumarDocument2 paginiMobile Sniffer: D. Mohan KumarIjjada VivekanandaÎncă nu există evaluări
- Line Following RobotDocument54 paginiLine Following RobotGautam RaaviÎncă nu există evaluări
- Micro Based Safty Gaurd For BlindsDocument6 paginiMicro Based Safty Gaurd For BlindsPrabhat SagarÎncă nu există evaluări
- Blind Transmitter Turns TVs On/Off from PocketDocument11 paginiBlind Transmitter Turns TVs On/Off from Pocketdummy1957jÎncă nu există evaluări
- Automatic Room Light Controller With Visitor Counter: DescriptionDocument10 paginiAutomatic Room Light Controller With Visitor Counter: DescriptionDanny PinheiroÎncă nu există evaluări
- OBD II Interface Chip Data SheetDocument8 paginiOBD II Interface Chip Data SheetbigcumÎncă nu există evaluări
- ICFYCC Robot for Industrial SafetyDocument8 paginiICFYCC Robot for Industrial SafetyManoj KumarÎncă nu există evaluări
- Mini Project ReportDocument27 paginiMini Project Reportakhilmadhu2010Încă nu există evaluări
- M.Siva Prasadu Reddy: Submitted byDocument18 paginiM.Siva Prasadu Reddy: Submitted bySai AdithyaÎncă nu există evaluări
- Cell Phone Operated LandroverDocument31 paginiCell Phone Operated Landrover8bitrebellionÎncă nu există evaluări
- 20 Jerbin Joy KolencherilDocument5 pagini20 Jerbin Joy Kolencherilmonish pmÎncă nu există evaluări
- 1 Level 1. LED Chaser: 74ls138 74ls163Document5 pagini1 Level 1. LED Chaser: 74ls138 74ls163Sahil BhatiaÎncă nu există evaluări
- Universal RobotDocument120 paginiUniversal RobotRajkumar NmlÎncă nu există evaluări
- Obstacle Sensed Switching in Industrial ApplicationsDocument68 paginiObstacle Sensed Switching in Industrial ApplicationsAbhijit PattnaikÎncă nu există evaluări
- ECE1Document11 paginiECE1Hermogenes L. Jr MejiaÎncă nu există evaluări
- Infrared Emitter From CMOS 555 Robot RoomDocument6 paginiInfrared Emitter From CMOS 555 Robot RoomnkimlevnÎncă nu există evaluări
- Se-3 Stereo Encoder: PCS ElectronicsDocument5 paginiSe-3 Stereo Encoder: PCS ElectronicsHartadi Hendro SoekmonoÎncă nu există evaluări
- Low Cost 20MHz Function Generator With MAX038Document10 paginiLow Cost 20MHz Function Generator With MAX038buditux100% (1)
- V7i4 0235Document4 paginiV7i4 0235Irlandi MuhammadÎncă nu există evaluări
- Design and Implementation of Line Follower Robot Using Arduino MicrocontrollerDocument4 paginiDesign and Implementation of Line Follower Robot Using Arduino MicrocontrollerFahru ZainiÎncă nu există evaluări
- 1386camflougerobot BlueprintDocument22 pagini1386camflougerobot BlueprintPrathamesh AsawaleÎncă nu există evaluări
- LINE - MAZE SOLVING ROBOTDocument10 paginiLINE - MAZE SOLVING ROBOTtcteh86Încă nu există evaluări
- Generate Melodies Using M348X ICDocument9 paginiGenerate Melodies Using M348X ICMagesh KumarÎncă nu există evaluări
- Applied Science Private UniversityDocument12 paginiApplied Science Private UniversityRobin OhanyanÎncă nu există evaluări
- Infrared Based Industrial Gate Entry/Exits Management SystemDocument28 paginiInfrared Based Industrial Gate Entry/Exits Management SystemnirveshdagarÎncă nu există evaluări
- 2 Transistors TransmitterDocument145 pagini2 Transistors Transmittertying2005Încă nu există evaluări
- Print OutDocument13 paginiPrint Outnazece08Încă nu există evaluări
- Embedded Based Anti-Collision System in Trains and Controlling of Unmanned Rail GatesDocument22 paginiEmbedded Based Anti-Collision System in Trains and Controlling of Unmanned Rail GatesAdeline WinsterÎncă nu există evaluări
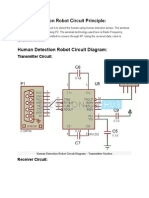
- Human Detection Robot Circuit PrincipleDocument4 paginiHuman Detection Robot Circuit PrincipleAli KhanÎncă nu există evaluări
- Realtek RTL2832U: The Mystery Chip at The Heart of RTL-SDRDocument2 paginiRealtek RTL2832U: The Mystery Chip at The Heart of RTL-SDRMoh MohÎncă nu există evaluări
- 222 MHZ Transverter, Mark 3: Paul Wade W1Ghz ©2020Document27 pagini222 MHZ Transverter, Mark 3: Paul Wade W1Ghz ©2020Sharbel AounÎncă nu există evaluări
- Smart AntennaDocument68 paginiSmart Antennaravikumar rayalaÎncă nu există evaluări
- User Manual - Dual Band Selectiv Repeater - PODRP27 NewDocument10 paginiUser Manual - Dual Band Selectiv Repeater - PODRP27 NewIvo TakahÎncă nu există evaluări
- Automatic Street LightDocument13 paginiAutomatic Street LightReymark CrisostomoÎncă nu există evaluări
- Obstacle Avoider Using Atmega 8, IR Sensor, Embedded C Programming On AVR TutorialDocument7 paginiObstacle Avoider Using Atmega 8, IR Sensor, Embedded C Programming On AVR TutorialMUDAM ALEKYAÎncă nu există evaluări
- Fluke187 IR Interface Notes PDFDocument5 paginiFluke187 IR Interface Notes PDFLakmalÎncă nu există evaluări
- Physics ProjecrtDocument7 paginiPhysics ProjecrtASHUTOSH KUMARÎncă nu există evaluări
- Rdac XF InstallationDocument20 paginiRdac XF InstallationSergii OkochaÎncă nu există evaluări
- DDS RF Signal Generator Design GuideDocument9 paginiDDS RF Signal Generator Design GuideIan McNairÎncă nu există evaluări
- Wireless Data Communication Infrared LedDocument21 paginiWireless Data Communication Infrared LedAparna BhardwajÎncă nu există evaluări
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDDe la EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDÎncă nu există evaluări
- Spanish2 Lesson 1Document9 paginiSpanish2 Lesson 1Manase RomeoÎncă nu există evaluări
- 22W Bridge / Stereo Audio Amplifier With Clipping Detector: ProtectionsDocument22 pagini22W Bridge / Stereo Audio Amplifier With Clipping Detector: ProtectionsManase RomeoÎncă nu există evaluări
- Resurse ProgramareDocument3 paginiResurse ProgramareManase RomeoÎncă nu există evaluări
- Datasheet ICE3A1065LJ v23 30 Jun 2011.FmDocument1 paginăDatasheet ICE3A1065LJ v23 30 Jun 2011.FmManase RomeoÎncă nu există evaluări
- 22W Bridge / Stereo Audio Amplifier With Clipping Detector: ProtectionsDocument22 pagini22W Bridge / Stereo Audio Amplifier With Clipping Detector: ProtectionsManase RomeoÎncă nu există evaluări
- Manual MobilenotetakerDocument54 paginiManual MobilenotetakerManase RomeoÎncă nu există evaluări
- Axp202 Axp209 Pmu Datasheet EnglishDocument48 paginiAxp202 Axp209 Pmu Datasheet EnglishJhon Fredy Diaz CorreaÎncă nu există evaluări
- FCC-B Radio Frequency Interference StatementDocument94 paginiFCC-B Radio Frequency Interference StatementManase RomeoÎncă nu există evaluări
- En CD00000159Document10 paginiEn CD00000159Manase RomeoÎncă nu există evaluări
- MCDocument61 paginiMCManase RomeoÎncă nu există evaluări
- Tds Lifecamvx 1000Document1 paginăTds Lifecamvx 1000johnsonaaaÎncă nu există evaluări
- LCD Monitor Service Manual: Model: ASUS VK266HDocument148 paginiLCD Monitor Service Manual: Model: ASUS VK266HManase RomeoÎncă nu există evaluări
- 200W Audio Amplifier PDFDocument2 pagini200W Audio Amplifier PDFLaurentiu IacobÎncă nu există evaluări
- Mic5205 (Ic On AP Out 3.3v)Document10 paginiMic5205 (Ic On AP Out 3.3v)shaolinkhoaÎncă nu există evaluări
- WP Building Installing and Configuring A Radius ServerDocument8 paginiWP Building Installing and Configuring A Radius ServerManase Romeo100% (1)
- Amplificadores LM PDFDocument8 paginiAmplificadores LM PDFJhonny IDÎncă nu există evaluări
- SMD CatalogDocument80 paginiSMD Catalogpbradaric91% (11)
- Calcularea VarsteiDocument1 paginăCalcularea VarsteibicaarghiraÎncă nu există evaluări
- LinuxFoundationX LFS101xDocument16 paginiLinuxFoundationX LFS101xChristian Cahuana RiverosÎncă nu există evaluări
- Amplificadores LM PDFDocument8 paginiAmplificadores LM PDFJhonny IDÎncă nu există evaluări
- LM317T (Ka317)Document6 paginiLM317T (Ka317)Manase RomeoÎncă nu există evaluări
- NEIDocument75 paginiNEIManase RomeoÎncă nu există evaluări
- SIEMENS RAA21 SeriesDocument6 paginiSIEMENS RAA21 SeriesKeo SokhimÎncă nu există evaluări
- Sany Part ManualDocument467 paginiSany Part ManualKumlachew Ali86% (7)
- EN500 Manual V1.0Document228 paginiEN500 Manual V1.0nntuan03100% (1)
- Chapter 4Document24 paginiChapter 4dj5Up3r d4v3Încă nu există evaluări
- Industrial Drive Control AssignmentDocument1 paginăIndustrial Drive Control AssignmentAbhay tiwariÎncă nu există evaluări
- GMAe BA - AGS531021-01 EN 03-2016Document72 paginiGMAe BA - AGS531021-01 EN 03-2016Пламен СимонскиÎncă nu există evaluări
- D4B8048BC6A-4-Cylinder Injection Engine (1 4 L Direct Injection Engine Turbocharger and Supercharger)Document245 paginiD4B8048BC6A-4-Cylinder Injection Engine (1 4 L Direct Injection Engine Turbocharger and Supercharger)Carlos Garcia Godoy100% (1)
- Edsa PaladinDocument64 paginiEdsa PaladinDaniel GutierrezÎncă nu există evaluări
- Safe WorkingDocument34 paginiSafe WorkingLeobardo Genaro Roque NájeraÎncă nu există evaluări
- Microprocessor ClassificationDocument5 paginiMicroprocessor Classificationsurya pratapÎncă nu există evaluări
- 2013-2014 Electrical Book ListDocument2 pagini2013-2014 Electrical Book Listmohamad nouhÎncă nu există evaluări
- GR04.F01 FipaDocument2 paginiGR04.F01 FipaHIDRAFLUIDÎncă nu există evaluări
- Guide to the Main Types of Pumps Used on ShipsDocument21 paginiGuide to the Main Types of Pumps Used on ShipsOm Prakash RajÎncă nu există evaluări
- Upgrading a Quad 303 amp with a NET Audio PSU board in under 40 stepsDocument1 paginăUpgrading a Quad 303 amp with a NET Audio PSU board in under 40 stepsragleta1406Încă nu există evaluări
- Getting Started With The ESP8266 ESP 12Document7 paginiGetting Started With The ESP8266 ESP 12marius_danila8736100% (2)
- RRB Junior Engineer Electronics Mock Test QuestionsDocument31 paginiRRB Junior Engineer Electronics Mock Test QuestionsthirumalÎncă nu există evaluări
- Liner Top Packer and Latch Seal Assy Rev2Document1 paginăLiner Top Packer and Latch Seal Assy Rev2JasonÎncă nu există evaluări
- Lab Report 11Document6 paginiLab Report 11James Lemuel MallapreÎncă nu există evaluări
- Kioti RX6630PSC-JP, RX7330PSC-JP Tractor Parts ManualDocument10 paginiKioti RX6630PSC-JP, RX7330PSC-JP Tractor Parts ManualLisakolyÎncă nu există evaluări
- WPS LPS HPS CM FM TS: Fpso Marechal Duque de Caxias (Mero 3 Project)Document1 paginăWPS LPS HPS CM FM TS: Fpso Marechal Duque de Caxias (Mero 3 Project)Md Abu BorhanÎncă nu există evaluări
- MAX 100-125kW 3-phase string inverter with 10 MPPTs and IP66 protectionDocument2 paginiMAX 100-125kW 3-phase string inverter with 10 MPPTs and IP66 protectionJeroen SÎncă nu există evaluări
- Ball Joint Service and InspectionDocument6 paginiBall Joint Service and InspectionthehillnlÎncă nu există evaluări
- Sensors and Switches Product InformationDocument2 paginiSensors and Switches Product InformationgeorgerouseÎncă nu există evaluări
- Bando Product Selector Pages 33 35Document3 paginiBando Product Selector Pages 33 35Daniele DuarteÎncă nu există evaluări
- Capacities of Various Plant and MachineryDocument4 paginiCapacities of Various Plant and MachineryRightie CubeÎncă nu există evaluări
- Ple 1me120 EuDocument4 paginiPle 1me120 EuMuslimin PutraÎncă nu există evaluări
- Submittal: Series: HSC, Diesel EngineDocument14 paginiSubmittal: Series: HSC, Diesel EngineOmar MuqtharÎncă nu există evaluări
- Documentazione T E C N I C A: User'S ManualDocument164 paginiDocumentazione T E C N I C A: User'S ManualAlexander100% (1)
- DELTA NC300 M EN 20130419 HighDocument138 paginiDELTA NC300 M EN 20130419 HighImam SyaefudinÎncă nu există evaluări