S-ar putea să vă placă și
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- Three Phase Induction Motor Using Single PhaseDocument8 paginiThree Phase Induction Motor Using Single PhasehezugÎncă nu există evaluări
- A Common-Mode Voltage Reduction Strategy For ADocument6 paginiA Common-Mode Voltage Reduction Strategy For Amalini72Încă nu există evaluări
- Stepping Motor Control CircuitsDocument9 paginiStepping Motor Control CircuitsrfcbaccaratÎncă nu există evaluări
- InverterDocument26 paginiInverteravijeet2828Încă nu există evaluări
- Ieee Current ModeDocument7 paginiIeee Current ModepqqpÎncă nu există evaluări
- Performance Analysis of Z Source Inverter Fed Induction Motor DriveDocument6 paginiPerformance Analysis of Z Source Inverter Fed Induction Motor DriveNagulapati KiranÎncă nu există evaluări
- Ece Vii Power Electronics (06ec73) SolutionDocument77 paginiEce Vii Power Electronics (06ec73) SolutionVijay SaiÎncă nu există evaluări
- High Efficiency DC-to-AC Power Inverter With Special DC InterfaceDocument6 paginiHigh Efficiency DC-to-AC Power Inverter With Special DC InterfacestrahinjaÎncă nu există evaluări
- Matteini PHD Part1Document15 paginiMatteini PHD Part1Anonymous EnggrUsmÎncă nu există evaluări
- Lesson 8 Hard and Soft Switching of Power SemiconductorsDocument12 paginiLesson 8 Hard and Soft Switching of Power SemiconductorsChacko MathewÎncă nu există evaluări
- An Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterDocument5 paginiAn Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterArghya MukherjeeÎncă nu există evaluări
- Researchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsDocument6 paginiResearchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsAnonymous zmV3UaG0TÎncă nu există evaluări
- 06533563Document8 pagini06533563MadhavanIceÎncă nu există evaluări
- Voltage Source Inverter Drive: Ece 504 - Experiment 2Document17 paginiVoltage Source Inverter Drive: Ece 504 - Experiment 2Olimpiu StoicutaÎncă nu există evaluări
- Power Electronic Module - Chapter 1Document27 paginiPower Electronic Module - Chapter 1jayxcell100% (1)
- Research Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper DrivesDocument4 paginiResearch Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper Drivesdivyamanikandan007Încă nu există evaluări
- Low Cost' Three Phase To Single Phase Matrix ConverterDocument6 paginiLow Cost' Three Phase To Single Phase Matrix ConverterRaghu RamÎncă nu există evaluări
- UC3845 Technical ExplanationDocument15 paginiUC3845 Technical ExplanationankurmalviyaÎncă nu există evaluări
- Aplicacion Uc3842Document15 paginiAplicacion Uc3842Gian Mejia100% (1)
- AppNote03 Uc3842Document14 paginiAppNote03 Uc3842Heriberto Flores AmpieÎncă nu există evaluări
- Slua 143Document15 paginiSlua 143Tonia KataÎncă nu există evaluări
- Implementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationDocument6 paginiImplementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationseventhsensegroupÎncă nu există evaluări
- Unit-2-Converter and HVDC System ControlDocument14 paginiUnit-2-Converter and HVDC System ControlT shivaprasad100% (1)
- Self-Oscillating Resonant AC/DC Converter Topology For Input Power-Factor CorrectionDocument11 paginiSelf-Oscillating Resonant AC/DC Converter Topology For Input Power-Factor CorrectionJie99Încă nu există evaluări
- Buck Converter Experiment ReportDocument12 paginiBuck Converter Experiment Reportjeries shehadehÎncă nu există evaluări
- Application of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerDocument5 paginiApplication of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerShreeji ExportsÎncă nu există evaluări
- A Unity Power Factor Converter Using HalfDocument14 paginiA Unity Power Factor Converter Using HalfLivia Faria PeresÎncă nu există evaluări
- Transformer Based Resonant DC Inverter For Brushless DC Motor Drive SystemDocument7 paginiTransformer Based Resonant DC Inverter For Brushless DC Motor Drive SystemStudents Xerox ChidambaramÎncă nu există evaluări
- SVPWM Thesis Prepared by DeekshitDocument81 paginiSVPWM Thesis Prepared by Deekshitchunduri_rambabuÎncă nu există evaluări
- Design of Single Phase Cyclo-Converter Using Cascaded Multilevel InverterDocument5 paginiDesign of Single Phase Cyclo-Converter Using Cascaded Multilevel InverterInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- 00878876Document6 pagini00878876jazzdeepakÎncă nu există evaluări
- Solar InvereterDocument47 paginiSolar InvereterReshma RaviÎncă nu există evaluări
- Unit-2-Converter and HVDC System ControlDocument13 paginiUnit-2-Converter and HVDC System Controlravikumar_ranganÎncă nu există evaluări
- Single Phase To Three Phase SystemDocument57 paginiSingle Phase To Three Phase SystemASK projectsÎncă nu există evaluări
- MCDocument10 paginiMCK.k. HariÎncă nu există evaluări
- A Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueDocument56 paginiA Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueVineetKumarÎncă nu există evaluări
- Fuzzy - Microsoft Word - IJEST11-03-10-070Document8 paginiFuzzy - Microsoft Word - IJEST11-03-10-0702K18/EE/244 VIPESH DUNKWALÎncă nu există evaluări
- 5KVA Inverter Boost H-BridgeDocument8 pagini5KVA Inverter Boost H-BridgeThèm Khát100% (1)
- Lecture No 5Document41 paginiLecture No 5sami ul haqÎncă nu există evaluări
- AC Drives and Soft Starter Application GuideDocument5 paginiAC Drives and Soft Starter Application GuideMinh TranÎncă nu există evaluări
- Induction Motor Drive Using Seven Level Multilevel Inverter For Energy Saving in Variable Torque Load ApplicationDocument8 paginiInduction Motor Drive Using Seven Level Multilevel Inverter For Energy Saving in Variable Torque Load ApplicationAnonymous 22GBLsme1Încă nu există evaluări
- Conv DC-DC Paper ENglishDocument5 paginiConv DC-DC Paper ENglishpepe890305Încă nu există evaluări
- L T D I V F D: Atest Echnological Evelopments N Ariable Requency RivesDocument18 paginiL T D I V F D: Atest Echnological Evelopments N Ariable Requency RivesBijay AgrawalÎncă nu există evaluări
- Battery Inverter For Modularly Structured PV Power Supply SystemsDocument4 paginiBattery Inverter For Modularly Structured PV Power Supply SystemsQM_2010Încă nu există evaluări
- WP AdaptiveCellTopologyDocument6 paginiWP AdaptiveCellTopologyManu MathewÎncă nu există evaluări
- Iceets 2013 6533563Document9 paginiIceets 2013 6533563Steni MoaiÎncă nu există evaluări
- A Novel Control Strategy of Indirect Matrix ConverDocument10 paginiA Novel Control Strategy of Indirect Matrix Convermạnh phanÎncă nu există evaluări
- Power Electronics Chapter 2-2: Applications of Semiconductor DevicesDocument18 paginiPower Electronics Chapter 2-2: Applications of Semiconductor DevicestesfuÎncă nu există evaluări
- Implementation of Full-Bridge Current-Fed Resonant Boost Converter Using PIC MicrocontrollerDocument6 paginiImplementation of Full-Bridge Current-Fed Resonant Boost Converter Using PIC MicrocontrollerAlonso CoradoÎncă nu există evaluări
- Motor Drives BY K .Sunil Kumar Griet-Power ElectronicsDocument4 paginiMotor Drives BY K .Sunil Kumar Griet-Power ElectronicsKalyan KumarÎncă nu există evaluări
- Power SupplyDocument91 paginiPower SupplyshreekadapaÎncă nu există evaluări
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 paginiDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourÎncă nu există evaluări
- Basic BLDC ControllerDocument9 paginiBasic BLDC ControllerRen KiyoshiiÎncă nu există evaluări
- Design and Implementation of ZCS BUCK CONVERTERDocument51 paginiDesign and Implementation of ZCS BUCK CONVERTERAriful Haque100% (1)
- Design of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterDocument4 paginiDesign of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterLawson SangoÎncă nu există evaluări
- AC DC AcDocument3 paginiAC DC AcPhani KumarÎncă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesÎncă nu există evaluări
- Spec - Dappro 16Mb SRAM - 5V - QFP68Document23 paginiSpec - Dappro 16Mb SRAM - 5V - QFP68Deepa DevarajÎncă nu există evaluări
- Silicon NPN Power Transistors: Savantic Semiconductor Product SpecificationDocument3 paginiSilicon NPN Power Transistors: Savantic Semiconductor Product SpecificationDeepa DevarajÎncă nu există evaluări
- Standard Wire Gauge ListDocument3 paginiStandard Wire Gauge ListDeepa DevarajÎncă nu există evaluări
- Tina Ti Spice ModelsDocument17 paginiTina Ti Spice Modelsdragos_bondÎncă nu există evaluări
- Systems Advantages of 1553Document8 paginiSystems Advantages of 1553Deepa DevarajÎncă nu există evaluări
- NPN 2N5671 - 2N5672: H I G H C U R R e N T F A S T S W I T C H I N G A P P L I C A T I o N SDocument0 paginiNPN 2N5671 - 2N5672: H I G H C U R R e N T F A S T S W I T C H I N G A P P L I C A T I o N SDeepa DevarajÎncă nu există evaluări
- 2N5672Document13 pagini2N5672Deepa DevarajÎncă nu există evaluări
- Vehicle Rto Exam FaqDocument1 paginăVehicle Rto Exam FaqDeepa DevarajÎncă nu există evaluări
- 2N6849 LP PMOS IR For Neg SupplyDocument7 pagini2N6849 LP PMOS IR For Neg SupplyDeepa DevarajÎncă nu există evaluări
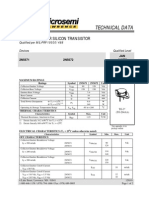
- Technical Data: NPN High Power Silicon TransistorDocument2 paginiTechnical Data: NPN High Power Silicon TransistorDeepa DevarajÎncă nu există evaluări
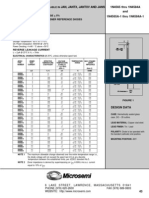
- Eatures Jan, Jantx, and Jantxv D B S P CDocument1 paginăEatures Jan, Jantx, and Jantxv D B S P CDeepa DevarajÎncă nu există evaluări
- Description Appearance: Surface Mount Voidless-Hermetically-Sealed Ultra Fast Recovery Glass RectifiersDocument0 paginiDescription Appearance: Surface Mount Voidless-Hermetically-Sealed Ultra Fast Recovery Glass RectifiersDeepa DevarajÎncă nu există evaluări
- 2 N 5153Document3 pagini2 N 5153Deepa DevarajÎncă nu există evaluări
- Technical Data: PNP High Power Silicon TransistorDocument3 paginiTechnical Data: PNP High Power Silicon TransistorDeepa DevarajÎncă nu există evaluări
- 1N4620Document4 pagini1N4620Deepa DevarajÎncă nu există evaluări
- 2N3637Document0 pagini2N3637Deepa DevarajÎncă nu există evaluări
- 1N4565 4584aDocument3 pagini1N4565 4584aDeepa DevarajÎncă nu există evaluări
- SpecificationsDocument4 paginiSpecificationsDeepa DevarajÎncă nu există evaluări
- Startup Design and Analysis NoteDocument6 paginiStartup Design and Analysis NoteDeepa DevarajÎncă nu există evaluări
- BC548 Transistor Pinout, Equivalent, Working As Amplifier-Switch & DatasheetDocument12 paginiBC548 Transistor Pinout, Equivalent, Working As Amplifier-Switch & DatasheetAderinla OkeowoÎncă nu există evaluări
- ATC100Document20 paginiATC100Juan C ReyesÎncă nu există evaluări
- SDAC CONNECTORS BinaryDocument5 paginiSDAC CONNECTORS BinaryJivendra KumarÎncă nu există evaluări
- Power Factor Testing in Transformer Condition Assessment - Is There A Better Way?Document4 paginiPower Factor Testing in Transformer Condition Assessment - Is There A Better Way?Galih Eka PrimintaÎncă nu există evaluări
- Brochure TMC Industry EngDocument4 paginiBrochure TMC Industry EngJhonatan HernándezÎncă nu există evaluări
- Table E13.gen. Electricity Generation: China, Reference CaseDocument1 paginăTable E13.gen. Electricity Generation: China, Reference CaseChenyang LinÎncă nu există evaluări
- Cost of Electrical Energy and PowerDocument24 paginiCost of Electrical Energy and PowerBayot Aliana Vine A.Încă nu există evaluări
- 14SMG0088 Ran 2T2RL90010L180030L210025 Abdn Mocn NokDocument16 pagini14SMG0088 Ran 2T2RL90010L180030L210025 Abdn Mocn NokIndra SinergiÎncă nu există evaluări
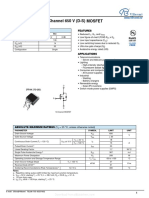
- N-Channel 0 V (D-S) Mosfet: Features Product SummaryDocument8 paginiN-Channel 0 V (D-S) Mosfet: Features Product SummarySajjad HussainÎncă nu există evaluări
- Inrush Current Mitigation TechniquesDocument2 paginiInrush Current Mitigation TechniquesNg Kah JunÎncă nu există evaluări
- 1360-PS-0001 IS WindObserver Manual Issue 14 - Part5Document2 pagini1360-PS-0001 IS WindObserver Manual Issue 14 - Part5AR El Patron KadryÎncă nu există evaluări
- Testing & CommissioningDocument11 paginiTesting & CommissioningK.Ramachandran100% (2)
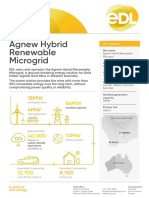
- Edl Agnew Hybrid ProjectDocument2 paginiEdl Agnew Hybrid Projectvictoe sunÎncă nu există evaluări
- HV Electrical Maintenance 2018Document4 paginiHV Electrical Maintenance 2018Hashim Othman IIÎncă nu există evaluări
- Conductive Polymer Chip Tantalum CapacitorDocument38 paginiConductive Polymer Chip Tantalum Capacitormati881Încă nu există evaluări
- APDocument112 paginiAPAbhi 7Încă nu există evaluări
- Chapter 3. CapacitanceDocument33 paginiChapter 3. CapacitanceKonata OzumiÎncă nu există evaluări
- Wiper Washer System - Nissan Sentra 1993Document6 paginiWiper Washer System - Nissan Sentra 1993Alessandro BaffaÎncă nu există evaluări
- Fuse Voltage Drop Chart - Cartridge FuseDocument2 paginiFuse Voltage Drop Chart - Cartridge FuseEudis Pineda100% (2)
- 2 Panel VCB With CR Panel WBSEDCL ApprovedDocument41 pagini2 Panel VCB With CR Panel WBSEDCL ApprovedjoyÎncă nu există evaluări
- PCT - 520672 Xenergy EatonDocument504 paginiPCT - 520672 Xenergy EatonAndes PutraÎncă nu există evaluări
- 400-Ma, 5-V Output, High Input Voltage Ldo Voltage RegulatorDocument14 pagini400-Ma, 5-V Output, High Input Voltage Ldo Voltage RegulatorالمتشــردÎncă nu există evaluări
- What Are The Main Effects of Electric Current and Its ApplicationsDocument2 paginiWhat Are The Main Effects of Electric Current and Its ApplicationsMrinal K Roy75% (4)
- Design and Installation of Stand-Alone Power SystemsDocument16 paginiDesign and Installation of Stand-Alone Power SystemsrohitÎncă nu există evaluări
- 221 Cardiolife Defibrillator Lab5Document3 pagini221 Cardiolife Defibrillator Lab5Salah ElbadawyÎncă nu există evaluări
- TEMPUS EXC DatasheetDocument1 paginăTEMPUS EXC DatasheetMohamed RameesÎncă nu există evaluări
- Comparison of Matlab PST PSAT and DigSILENT PDFDocument6 paginiComparison of Matlab PST PSAT and DigSILENT PDFRaghvendra TiwariÎncă nu există evaluări
- Tilting Assembly Gantry Stationary Base AssemblyDocument1 paginăTilting Assembly Gantry Stationary Base AssemblyKMC BIOMEDICALÎncă nu există evaluări
- Shri Vaari Profile.Document54 paginiShri Vaari Profile.anandpurushothamanÎncă nu există evaluări
- Testing Gto Thyristors: Testing Peak Reverse Voltage (PRV)Document4 paginiTesting Gto Thyristors: Testing Peak Reverse Voltage (PRV)DoDuyBacÎncă nu există evaluări