S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
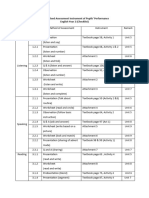
- Penyelarasan Instrumen Pentaksiran PBD Tahun 2 2024Document2 paginiPenyelarasan Instrumen Pentaksiran PBD Tahun 2 2024Hui YingÎncă nu există evaluări
- 04 Vaca Muerta Shale PDFDocument14 pagini04 Vaca Muerta Shale PDFsanty222Încă nu există evaluări
- English 1 - R&J - Character Comparison PaperDocument2 paginiEnglish 1 - R&J - Character Comparison PaperDexter 'Koogi Mane' DaysÎncă nu există evaluări
- Bodies That MatterDocument6 paginiBodies That MatterLorena FernandezÎncă nu există evaluări
- SCHLEICH - Advanced Test Technologies - GLP1-e - PE+IR+HVAC PDFDocument4 paginiSCHLEICH - Advanced Test Technologies - GLP1-e - PE+IR+HVAC PDFRakesh Kumar VermaÎncă nu există evaluări
- Master Pages:: Creating A Site-Wide Layout Using Master PagesDocument18 paginiMaster Pages:: Creating A Site-Wide Layout Using Master PagesCarlos LopezÎncă nu există evaluări
- Food Specification - Fresh Produce Cut - FinalDocument10 paginiFood Specification - Fresh Produce Cut - FinalSwamy AÎncă nu există evaluări
- MIS (Management Information Systems) : Margaret RouseDocument3 paginiMIS (Management Information Systems) : Margaret RouseSANDUN KAVINDAÎncă nu există evaluări
- Ecdsa PDFDocument56 paginiEcdsa PDFMarcos CariÎncă nu există evaluări
- Kinesiology For The Martial Arts PDFDocument50 paginiKinesiology For The Martial Arts PDFB'MAZ100% (4)
- Lllllllllllllllllillll - L - L - !) !) ) L) (L) !) ) L! (L) LLLLLLLLLLLLLLLLLLLLLLLLLLDocument6 paginiLllllllllllllllllillll - L - L - !) !) ) L) (L) !) ) L! (L) LLLLLLLLLLLLLLLLLLLLLLLLLLesssiÎncă nu există evaluări
- Method Statement For Surface Preparation and Coating For Pipes Fittings (Perma)Document10 paginiMethod Statement For Surface Preparation and Coating For Pipes Fittings (Perma)Mohamed KhalilÎncă nu există evaluări
- OpenSees Future Direction 2017Document39 paginiOpenSees Future Direction 2017fariasgarciarojasÎncă nu există evaluări
- SAP SD ConsultantDocument5 paginiSAP SD Consultantneverever143Încă nu există evaluări
- 10 Heuristic Principles: by Jakob NielsenDocument16 pagini10 Heuristic Principles: by Jakob NielsenKelum JayamannaÎncă nu există evaluări
- Educational Planning (Felipe)Document102 paginiEducational Planning (Felipe)Felipe Beranio Sullera Jr.100% (4)
- Formalization of UML Use Case Diagram-A Z Notation Based ApproachDocument6 paginiFormalization of UML Use Case Diagram-A Z Notation Based ApproachAnonymous PQ4M0ZzG7yÎncă nu există evaluări
- Application LetterDocument8 paginiApplication LetterProbiotik Organik PalembangÎncă nu există evaluări
- Developing Training Program For Effective and Quality Volleyball PlayersDocument13 paginiDeveloping Training Program For Effective and Quality Volleyball PlayersDeogracia BorresÎncă nu există evaluări
- South Coast LIDAR Project, 2008 - Delivery 1 QC AnalysisDocument15 paginiSouth Coast LIDAR Project, 2008 - Delivery 1 QC AnalysisariesugmÎncă nu există evaluări
- Whats Dupont SGP Interlayerldsts PDFDocument3 paginiWhats Dupont SGP Interlayerldsts PDFnightact44Încă nu există evaluări
- 2005 - Quality Criteria of Transdisciplinary ResearchDocument78 pagini2005 - Quality Criteria of Transdisciplinary Researchis03lcmÎncă nu există evaluări
- The Reading The Mind in The Eyes Test: Testretest Reliability and Preliminary Rsychometric Rroperties of The German VersionDocument9 paginiThe Reading The Mind in The Eyes Test: Testretest Reliability and Preliminary Rsychometric Rroperties of The German VersionSEP-PublisherÎncă nu există evaluări
- Enterprise Exam Style QuestionsDocument2 paginiEnterprise Exam Style Questionsapi-301785352Încă nu există evaluări
- Pathway Foundation T'SDocument113 paginiPathway Foundation T'SDo HuyenÎncă nu există evaluări
- Table With Row Headers in Column A and Column Headers in Rows 5 To 7. Leading Dots Indicate SubpartsDocument2 paginiTable With Row Headers in Column A and Column Headers in Rows 5 To 7. Leading Dots Indicate SubpartsJeffrey DuqueÎncă nu există evaluări
- NadiAstrologyAndTransitspart 2Document7 paginiNadiAstrologyAndTransitspart 2Jhon Jairo Mosquera RodasÎncă nu există evaluări
- Phase Transformations in Metals and Alloys PDFDocument37 paginiPhase Transformations in Metals and Alloys PDFWillmans Nolberto Ticlla MostaceroÎncă nu există evaluări
- Uci Xco Me Results XDocument4 paginiUci Xco Me Results XSimone LanciottiÎncă nu există evaluări
- LAMP StackDocument10 paginiLAMP Stackaami6Încă nu există evaluări