S-ar putea să vă placă și
- 2.1 2SC5200 & 2SA1943 Pow AmplifierDocument2 pagini2.1 2SC5200 & 2SA1943 Pow AmplifierAPLCTNÎncă nu există evaluări
- Padole Driving School - 093259 22170 - AmravatiDocument1 paginăPadole Driving School - 093259 22170 - AmravatiAPLCTNÎncă nu există evaluări
- Awards and Honors Questions and Answers PDFDocument11 paginiAwards and Honors Questions and Answers PDFAPLCTNÎncă nu există evaluări
- RRB NTPC Post-Wise Job Profile and Description 2022Document1 paginăRRB NTPC Post-Wise Job Profile and Description 2022APLCTNÎncă nu există evaluări
- Practice Set: Clerical Cadre (Pre.) ExamDocument9 paginiPractice Set: Clerical Cadre (Pre.) ExamAPLCTNÎncă nu există evaluări
- Ac Motor Controller For Modern Appliances Using Ls7311: FeaturesDocument3 paginiAc Motor Controller For Modern Appliances Using Ls7311: FeaturesAPLCTNÎncă nu există evaluări
- Sbi Po Exam: Prelims (English) Previous PaperDocument12 paginiSbi Po Exam: Prelims (English) Previous PaperAPLCTNÎncă nu există evaluări
- Ethics in Clinical ResearchDocument3 paginiEthics in Clinical ResearchAPLCTN100% (1)
- Ibps RRB Clerk Prelims 2020 Model Paper PDF Set 1Document25 paginiIbps RRB Clerk Prelims 2020 Model Paper PDF Set 1APLCTNÎncă nu există evaluări
- n the field of biomedical engineering, specifically with biomechanics, transport phenomena, biomechatronics, bionanotechnology, and modelling of biological systems. W16 engine of the Bugatti Veyron. Mechanical engineers design engines, power plants, other machines... ...structures, and vehicles of all sizes. History Education Job duties Subdisciplines Modern tools Areas of research Related fields See also References Further reading External links Last edited 4 days ago by Smenjas Wikipedia Content is available under CC BY-SA 3.0 unless otherwise noted. Terms of UsePrivacyDesktopDocument2 paginin the field of biomedical engineering, specifically with biomechanics, transport phenomena, biomechatronics, bionanotechnology, and modelling of biological systems. W16 engine of the Bugatti Veyron. Mechanical engineers design engines, power plants, other machines... ...structures, and vehicles of all sizes. History Education Job duties Subdisciplines Modern tools Areas of research Related fields See also References Further reading External links Last edited 4 days ago by Smenjas Wikipedia Content is available under CC BY-SA 3.0 unless otherwise noted. Terms of UsePrivacyDesktopAPLCTNÎncă nu există evaluări
- SC 5200 1943Document2 paginiSC 5200 1943APLCTNÎncă nu există evaluări
- Competitive Exams: Capacitors: ExamraceDocument1 paginăCompetitive Exams: Capacitors: ExamraceAPLCTNÎncă nu există evaluări
- Schematic Mono-4558b Sheet-1 20180420211056 PDFDocument1 paginăSchematic Mono-4558b Sheet-1 20180420211056 PDFAPLCTNÎncă nu există evaluări
- TDA2030 Subwoofer PCB BoardDocument1 paginăTDA2030 Subwoofer PCB BoardAPLCTNÎncă nu există evaluări
- Confusing GK Questions and AnswersDocument5 paginiConfusing GK Questions and AnswersAPLCTNÎncă nu există evaluări
- Johnson Motor High TorqueDocument1 paginăJohnson Motor High TorqueAPLCTNÎncă nu există evaluări
- Provisional Allotment List of CAP Round-II For The Admission To The First Year of Four YearDocument9 paginiProvisional Allotment List of CAP Round-II For The Admission To The First Year of Four YearAPLCTNÎncă nu există evaluări
- 0 - 30 V Adjustable Voltage, Current Stabilized VoltageDocument2 pagini0 - 30 V Adjustable Voltage, Current Stabilized VoltageAPLCTNÎncă nu există evaluări
- ELECTRICAL PROJECTS USING MATLAB/SIMULINK Multi Machine Power System Stability Enhancement Using Static Synchronous Series Compensator (SSSC)Document5 paginiELECTRICAL PROJECTS USING MATLAB/SIMULINK Multi Machine Power System Stability Enhancement Using Static Synchronous Series Compensator (SSSC)APLCTNÎncă nu există evaluări
- Priti Prabhakar Wakodikar and Bhushan MankarDocument9 paginiPriti Prabhakar Wakodikar and Bhushan MankarAPLCTN0% (1)
- Standard Photo Print SizesDocument2 paginiStandard Photo Print SizesAPLCTNÎncă nu există evaluări
- A Particle Swarm Optimization For Optimal Reactive Power DispatchDocument9 paginiA Particle Swarm Optimization For Optimal Reactive Power DispatchInternational Journal of Research in Science & TechnologyÎncă nu există evaluări
- DocumentDocument4 paginiDocumentAPLCTNÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Industrial Batteries - Network Power Sonnenschein Solar Safe Storage Capacity For Renewable Energy. SpecificationsDocument4 paginiIndustrial Batteries - Network Power Sonnenschein Solar Safe Storage Capacity For Renewable Energy. Specificationssebax123Încă nu există evaluări
- Gennex Retail Price October 2019Document2 paginiGennex Retail Price October 2019Gare OdezimeÎncă nu există evaluări
- 12A ManualDocument2 pagini12A ManualWERMERMÎncă nu există evaluări
- Jindal Power Limited, Tamnar: JPL/OPN-250/SOP/.. 01/29.07.2019 00/00Document4 paginiJindal Power Limited, Tamnar: JPL/OPN-250/SOP/.. 01/29.07.2019 00/00Chandramani PatelÎncă nu există evaluări
- Arken 2500 PrimeDocument4 paginiArken 2500 PrimeOmar Saeed SaeedÎncă nu există evaluări
- Technical Data Input File Site Study TurDocument2 paginiTechnical Data Input File Site Study TurthanhluanvtÎncă nu există evaluări
- Testing and Certification ServicesDocument12 paginiTesting and Certification ServicesBash MatÎncă nu există evaluări
- Danfoss VLT HVAC FC100 Manual PDFDocument149 paginiDanfoss VLT HVAC FC100 Manual PDFalphons3Încă nu există evaluări
- Inverter 12VDC To 220VAC 100 Watt by Power Transistor 2N3055Document19 paginiInverter 12VDC To 220VAC 100 Watt by Power Transistor 2N3055Bank100% (1)
- All Topics Power SystemDocument126 paginiAll Topics Power Systemtony kimaniÎncă nu există evaluări
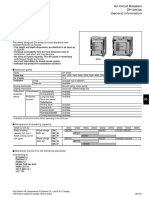
- Fuji dh08 800 A Air Circuit BreakerDocument53 paginiFuji dh08 800 A Air Circuit BreakerVăn Hùng NguyễnÎncă nu există evaluări
- IEEE Transactions Power Apparatus and Systems, Vol. No. 2, February 1981 798Document14 paginiIEEE Transactions Power Apparatus and Systems, Vol. No. 2, February 1981 798Jocelyne SalgadoÎncă nu există evaluări
- Price List Chint 2021Document54 paginiPrice List Chint 2021dwi meiÎncă nu există evaluări
- 04 CCDocument32 pagini04 CCsareluis2727Încă nu există evaluări
- CSD Manual For CBDocument121 paginiCSD Manual For CBMd. Arifur Kabir100% (2)
- IS5 ManualDocument156 paginiIS5 ManualAnonymous GbfoQcC0% (1)
- Electrical System Design For High Rise BuildingDocument12 paginiElectrical System Design For High Rise Buildingbookbok100% (5)
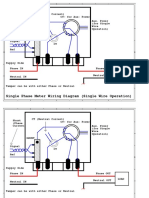
- Single Phase Meter Wiring Diagram (Single Wire Operation) : CT (Neutral Current) Shunt (Phase Current) CT-for Aux: PowerDocument2 paginiSingle Phase Meter Wiring Diagram (Single Wire Operation) : CT (Neutral Current) Shunt (Phase Current) CT-for Aux: PowerchinninitinÎncă nu există evaluări
- Bridgeport - Hardinge Mills - Relay Ext DC Voltage MissingDocument4 paginiBridgeport - Hardinge Mills - Relay Ext DC Voltage Missingasad_masharfeh7401Încă nu există evaluări
- Power Systems Lab PDFDocument54 paginiPower Systems Lab PDFBhanu BkvÎncă nu există evaluări
- S&L - Honeywell BESSDocument19 paginiS&L - Honeywell BESSNguyễn Huy HoàngÎncă nu există evaluări
- Cat VR6Document110 paginiCat VR6Dee Formee100% (7)
- RectimatDocument31 paginiRectimatfndprojectÎncă nu există evaluări
- PRS-785 Generator-Transformer (GT) Protection Instruction ManualDocument294 paginiPRS-785 Generator-Transformer (GT) Protection Instruction ManualDebby Mendoza100% (1)
- Module-14 Rev-06 PDFDocument168 paginiModule-14 Rev-06 PDFMD. Mahmudul Hasan LimonÎncă nu există evaluări
- PSobrecorriente PDFDocument32 paginiPSobrecorriente PDFSebas TenesacaÎncă nu există evaluări
- Relay Symbols and Fuction NumDocument14 paginiRelay Symbols and Fuction NumPrasanna DharmapriyaÎncă nu există evaluări
- Sop HT SWGR MeggeringDocument3 paginiSop HT SWGR MeggeringLincoln DsouzaÎncă nu există evaluări
- Sound Pressure, Sound Power, and Sound Intensity What's The DifferenceDocument1 paginăSound Pressure, Sound Power, and Sound Intensity What's The DifferencebenedictustjwÎncă nu există evaluări
- Solar PV Design ProblemDocument4 paginiSolar PV Design ProblemAjala Oladimeji DurotoluwaÎncă nu există evaluări