S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- rr321402 MicroprocessorsDocument8 paginirr321402 MicroprocessorsSRINIVASA RAO GANTAÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Microprocessors Applications Nr410310 18november2005pmDocument1 paginăMicroprocessors Applications Nr410310 18november2005pmNizam Institute of Engineering and Technology LibraryÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Microprocessors May2006 Rr420303Document8 paginiMicroprocessors May2006 Rr420303Nizam Institute of Engineering and Technology LibraryÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Microprocessors and Micro Controllers Nr311902 November AmDocument1 paginăMicroprocessors and Micro Controllers Nr311902 November AmNizam Institute of Engineering and Technology LibraryÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Microprocessors Applications March06 Nr410310Document1 paginăMicroprocessors Applications March06 Nr410310Nizam Institute of Engineering and Technology LibraryÎncă nu există evaluări
- JNTU Old Question Papers 2007Document8 paginiJNTU Old Question Papers 2007Srinivasa Rao G100% (12)
- JNTU Old Question Papers 2007Document8 paginiJNTU Old Question Papers 2007Srinivasa Rao GÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Microprocessors and Interfacing Rr320202Document8 paginiMicroprocessors and Interfacing Rr320202Nizam Institute of Engineering and Technology LibraryÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Microprocessors and Interfacing March06 Rr312001Document8 paginiMicroprocessors and Interfacing March06 Rr312001Nizam Institute of Engineering and Technology LibraryÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Microprocessors and Its Applications March06 Nr312001Document2 paginiMicroprocessors and Its Applications March06 Nr312001Nizam Institute of Engineering and Technology LibraryÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- rr320202 Microprocessors and InterfacingDocument8 paginirr320202 Microprocessors and InterfacingSRINIVASA RAO GANTAÎncă nu există evaluări
- Microprocessors and Interfacing r05220504Document7 paginiMicroprocessors and Interfacing r05220504Nizam Institute of Engineering and Technology LibraryÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Rr322203 Microprocessors MicrocontrollersDocument8 paginiRr322203 Microprocessors Microcontrollersgeddam06108825Încă nu există evaluări
- JNTU Old Question Papers 2007Document7 paginiJNTU Old Question Papers 2007Srinivasa Rao G100% (12)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Rr322203 Microprocessors MicrocontrollersDocument8 paginiRr322203 Microprocessors Microcontrollersgeddam06108825Încă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- JNTU Old Question Papers 2007Document4 paginiJNTU Old Question Papers 2007Srinivasa Rao G100% (1)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Rr320203 Modelling of Power System ComponentsDocument8 paginiRr320203 Modelling of Power System ComponentsSrinivasa Rao G100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Microwave Engineering May2004 NR 320403Document5 paginiMicrowave Engineering May2004 NR 320403Nizam Institute of Engineering and Technology LibraryÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Microwave Engineering November Am Rr311701Document8 paginiMicrowave Engineering November Am Rr311701Nizam Institute of Engineering and Technology LibraryÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Microwave Engineering Jan2003or 320455Document1 paginăMicrowave Engineering Jan2003or 320455Nizam Institute of Engineering and Technology LibraryÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- JNTU Old Question Papers 2007Document8 paginiJNTU Old Question Papers 2007Srinivasa Rao GÎncă nu există evaluări
- Bgs Chapter 2Document33 paginiBgs Chapter 2KiranShettyÎncă nu există evaluări
- Dr. A. Aziz Bazoune: King Fahd University of Petroleum & MineralsDocument37 paginiDr. A. Aziz Bazoune: King Fahd University of Petroleum & MineralsJoe Jeba RajanÎncă nu există evaluări
- F3 Eng Mid-Term 2023Document5 paginiF3 Eng Mid-Term 2023Mwinyi BlogÎncă nu există evaluări
- Organisation Restructuring 2023 MGMT TeamDocument9 paginiOrganisation Restructuring 2023 MGMT TeamArul AravindÎncă nu există evaluări
- Final Box Design Prog.Document61 paginiFinal Box Design Prog.afifa kausarÎncă nu există evaluări
- AMCAT All in ONEDocument138 paginiAMCAT All in ONEKuldip DeshmukhÎncă nu există evaluări
- Faith-Based Organisational Development (OD) With Churches in MalawiDocument10 paginiFaith-Based Organisational Development (OD) With Churches in MalawiTransbugoyÎncă nu există evaluări
- Ielts Reading Whale CultureDocument4 paginiIelts Reading Whale CultureTreesa VarugheseÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Factor Causing Habitual Viewing of Pornographic MaterialDocument64 paginiFactor Causing Habitual Viewing of Pornographic MaterialPretzjay BensigÎncă nu există evaluări
- BIOCHEM REPORT - OdtDocument16 paginiBIOCHEM REPORT - OdtLingeshwarry JewarethnamÎncă nu există evaluări
- How To Create Partner Function in SAP ABAPDocument5 paginiHow To Create Partner Function in SAP ABAPRommel SorengÎncă nu există evaluări
- Right Hand Man LyricsDocument11 paginiRight Hand Man LyricsSteph CollierÎncă nu există evaluări
- Oldham Rules V3Document12 paginiOldham Rules V3DarthFooÎncă nu există evaluări
- Pediatric Autonomic DisorderDocument15 paginiPediatric Autonomic DisorderaimanÎncă nu există evaluări
- Chapter 12 NotesDocument4 paginiChapter 12 NotesIvanTh3Great100% (6)
- What Is Thesis Plural FormDocument8 paginiWhat Is Thesis Plural Formtracyjimenezstamford100% (2)
- Peter Lehr Militant Buddhism The Rise of Religious Violence in Sri Lanka Myanmar and Thailand Springer International PDFDocument305 paginiPeter Lehr Militant Buddhism The Rise of Religious Violence in Sri Lanka Myanmar and Thailand Springer International PDFIloviaaya RegitaÎncă nu există evaluări
- Errol PNP Chief AzurinDocument8 paginiErrol PNP Chief AzurinDarren Sean NavaÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Management Strategy CH 2Document37 paginiManagement Strategy CH 2Meishera Panglipurjati SaragihÎncă nu există evaluări
- Adm Best Practices Guide: Version 2.0 - November 2020Document13 paginiAdm Best Practices Guide: Version 2.0 - November 2020Swazon HossainÎncă nu există evaluări
- CopacabanaDocument2 paginiCopacabanaNereus Sanaani CAñeda Jr.Încă nu există evaluări
- Mathematics Trial SPM 2015 P2 Bahagian BDocument2 paginiMathematics Trial SPM 2015 P2 Bahagian BPauling ChiaÎncă nu există evaluări
- Modern DrmaDocument7 paginiModern DrmaSHOAIBÎncă nu există evaluări
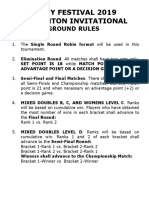
- Ground Rules 2019Document3 paginiGround Rules 2019Jeremiah Miko LepasanaÎncă nu există evaluări
- Assignment 1 Front Sheet: Qualification BTEC Level 5 HND Diploma in Computing Unit Number and Title Submission DateDocument18 paginiAssignment 1 Front Sheet: Qualification BTEC Level 5 HND Diploma in Computing Unit Number and Title Submission DatecuongÎncă nu există evaluări
- Introduction To Public HealthDocument54 paginiIntroduction To Public HealthKristelle Marie Enanoria Bardon50% (2)
- Summar Training Report HRTC TRAINING REPORTDocument43 paginiSummar Training Report HRTC TRAINING REPORTPankaj ChauhanÎncă nu există evaluări
- Genpact - Job Description - One Data and AI - B Tech Circuit and MCA (3) 2Document4 paginiGenpact - Job Description - One Data and AI - B Tech Circuit and MCA (3) 2SHIVANSH SRIVASTAVA (RA2011053010013)Încă nu există evaluări
- Acfrogb0i3jalza4d2cm33ab0kjvfqevdmmcia - Kifkmf7zqew8tpk3ef Iav8r9j0ys0ekwrl4a8k7yqd0pqdr9qk1cpmjq Xx5x6kxzc8uq9it Zno Fwdrmyo98jelpvjb-9ahfdekf3cqptDocument1 paginăAcfrogb0i3jalza4d2cm33ab0kjvfqevdmmcia - Kifkmf7zqew8tpk3ef Iav8r9j0ys0ekwrl4a8k7yqd0pqdr9qk1cpmjq Xx5x6kxzc8uq9it Zno Fwdrmyo98jelpvjb-9ahfdekf3cqptbbÎncă nu există evaluări
- DELA CRUZ - LAC 1 - 002 - Individual Learning Monitoring Plan - Bugtongnapulo INHSDocument2 paginiDELA CRUZ - LAC 1 - 002 - Individual Learning Monitoring Plan - Bugtongnapulo INHSGilbert Dela CruzÎncă nu există evaluări
- How to Teach Nature Journaling: Curiosity, Wonder, AttentionDe la EverandHow to Teach Nature Journaling: Curiosity, Wonder, AttentionEvaluare: 4.5 din 5 stele4.5/5 (3)
- Lower Secondary Science Workbook: Stage 8De la EverandLower Secondary Science Workbook: Stage 8Evaluare: 5 din 5 stele5/5 (1)