Documente Academic
Documente Profesional
Documente Cultură
TCC Zat
Încărcat de
Elvis AlbarelloTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
TCC Zat
Încărcat de
Elvis AlbarelloDrepturi de autor:
Formate disponibile
UNIVERSIDADE ESTADUAL DO OESTE DO PARAN UNIOESTE CENTRO DE ENGENHARIA E CINCIAS EXATAS CAMPUS DE FOZ DO IGUAU CURSO DE ENGENHARIA ELTRICA
DESENVOLVIMENTO DE UM SISTEMA DE AQUISIO DOS SINAIS DE UMA REDE CAN UTILIZANDO RADIOFREQUNCIA ATRAVS DA PORTA USB
GUILHERME ZAT
FOZ DO IGUAU - PR 2011
2011
DESENVOLVIMENTO DE UM SISTEMA DE AQUISIO DOS SINAIS DE UMA REDE CAN UTILIZANDO RADIOFREQUNCIA ATRAVS DA PORTA USB
UNIOESTE ENGENHARIA ELTRICA
GUILHERME ZAT
DESENVOLVIMENTO DE UM SISTEMA DE AQUISIO DOS SINAIS DE UMA REDE CAN UTILIZANDO RADIOFREQUNCIA ATRAVS DA PORTA USB
Relatrio de estagio apresentado ao curso de Engenharia Eltrica da Universidade Estadual do Oeste do Paran, como parte integrante dos requisitos para obteno do titulo de Engenheiro Eletricista.
Orientador: Prof. Carlos Henrique Zanelato Pantaleo, Dr.
FOZ DO IGUAU 2011
GUILHERME ZAT
DESENVOLVIMENTO DE UM SISTEMA DE AQUISIO DOS SINAIS DE UMA REDE CAN UTILIZANDO RADIOFREQUNCIA ATRAVS DA PORTA USB
Relatrio de estagio apresentado ao Curso de Engenharia Eltrica da Universidade Estadual do Oeste do Paran, aprovado pela comisso julgadora:
___________________________________________________________ Docente Supervisor de Estgio: Prof. Dr. Carlos Henrique Zanelato Pantaleo Professor da UNIOESTE Campus de Foz do Iguau
_______________________________________________ Prof. Moacir Fonteque Professor da UNIOESTE Campus de Foz do Iguau
_________________________________________________ Eng. Msc. Silvia Frazo Matos Engenheira da Diviso de Engenharia Civil e Arquitetura (ENCC.DT) da ITAIPU Binacional
_________________________________________________ Prof. Dr. Eldio Lobo Coord. de Estgio Supervisionado do Curso de Eng. Eltrica UNIOESTE Campus de Foz do Iguau
Foz do Iguau, 27 de Outubro de 2011
Dedico este trabalho a toda a minha famlia e ao nosso Pai Celestial que ele sempre ilumine o nosso caminho.
AGRADECIMENTOS
Agradeo a todos os docentes que me ajudaram na minha formao, capacitao e instruo acadmica. Agradeo ao meu orientador que tornou possvel a concluso deste trabalho, desde o inicio ajudando nas minhas duvidas, fornecendo equipamentos e componentes eletrnicos e possibilitando o desenvolvimento do mesmo no laboratrio de controle e automao (LCA). Agradeo a todos os meus colegas pelas dicas de programao em linguagem JAVA e tambm pelas ideias para a melhoria do sistema. Agradeo a todos os meus familiares que sempre me apoiaram em todas as etapas da minha vida e me incentivaram a sempre buscar novos conhecimentos e conseguiram me fornecer a oportunidade de cursar e finalizar o curso. Sendo assim, agradeo a esta oportunidade fornecida e a todos que nela se fizeram presentes.
O sucesso ir de fracasso em fracasso sem perder entusiasmo. Winston Churchill
RESUMO
ZAT, G. (2011). Desenvolvimento De Um Sistema De Aquisio Dos Sinais De Uma Rede CAN Utilizando Radiofrequncia Atravs Da Porta USB. Relatrio de Estagio (Graduao) Curso de Engenharia Eltrica, Universidade Estadual do Oeste do Paran UNIOESTE, Foz do Iguau, 2011.
Nas aplicaes industriais vem se utilizando, em escala cada vez maior, o protocolo de comunicao CAN, sendo assim, criou-se a demanda de aquisio e armazenamento dos dados que transitam por esta. Nesta perspectiva, este trabalho consiste na pesquisa dos protocolos de comunicao, USB e ZigBee, e na execuo de um prottipo de aquisio dos dados utilizando estes protocolos juntamente com uma interface grfica programada em Java e com um sistema de banco de dados em MySQL. Para a construo deste prottipo foram utilizados microcontroladores da famlia PIC da empresa Microchip e os mdulos XBee da empresa Digi, antiga MaxStream. Apesar dos problemas encontrados na comunicao entre a interface grfica e o microcontrolador foi possvel obter resultados satisfatrios nos testes realizados, tornando o sistema de aquisio vivel e confivel.
Palavras-chave: Rede CAN, ZigBee, XBee, microcontroladores, PIC, USB, sistema de monitoramento, sistema de aquisio.
ABSTRACT
ZAT, G. (2011). Desenvolvimento De Um Sistema De Aquisio Dos Sinais De Uma Rede CAN Utilizando Radiofrequncia Atravs Da Porta USB. Relatrio de Estagio (Graduao) Curso de Engenharia Eltrica, Universidade Estadual do Oeste do Paran UNIOESTE, Foz do Iguau, 2011.
In industrial applications has been using, in ever-increasing scale, the CAN communication protocol, so this created a demand for acquisition and storage of data passing through it. In this perspective, this work is the research of communication protocols, USB and ZigBee, and implementation of a prototype data acquisition using these protocols along with a graphical user interface, programmed in Java, and with a system database, in MySQL. For the construction this prototype was used the PIC microcontroller, from Microchip company, and the Digi company's XBee modules, formerly MaxStream. Despite the problems encountered in communication between the GUI and the microcontroller was possible to obtain satisfactory results in tests, making the acquisition system affordable and reliable.
Key-words: CAN bus, ZigBee, XBee, microcontrolers, PIC, USB, monitoring system, acquiring system.
10
LISTA DE ILUSTRAES
Figura 2.1 - Camadas do modelo ISO/OSI definidas pelos padres IEEE 802.15.4 e ZigBee ..................................................................................................... 26 Figura 2.2 - Rede do tipo estrela e seus componentes ....................................... 27 Figura 2.3 - Rede do tipo malha e seus componentes ........................................ 27 Figura 2.4 - Rede do tipo rvore e seus componentes. ...................................... 28 Figura 2.5 - Digrama EER do banco de dados. .................................................. 33 Figura 2.6 - Tela Inicial da Interface Grfica. ...................................................... 33 Figura 2.7 - Tela de Cadastro dos Sensores. ..................................................... 34 Figura 2.8 - Tela de Listagem dos Sensores Cadastrados. ................................ 34 Figura 2.9 - Tela de Listagem das Aquisies Armazenadas. ............................ 35 Figura 2.10 - Tela de Configurao da Comunicao com a Porta Serial. ......... 36 Figura 2.11 - Circuito de Comunicao entre o Computador e a Rede ZigBee .. 37 Figura 2.12 - Placa Final de Comunicao entre o Computador e a rede ZigBee. .................................................................................................................................. 38 Figura 2.13 - Tela Inicial do Programa X-CTU. ................................................... 39 Figura 2.14 - Tela de Configurao do Modulo. .................................................. 40 Figura 2.15 - Circuito Eltrico do Prottipo de Comunicao entre a Rede CAN e a rede ZigBee. ........................................................................................................... 41 Figura 2.16 - Placa do Prottipo de Comunicao da Rede CAN com a Rede ZigBee. ...................................................................................................................... 42 Figura 2.17 - Circuito Eltrico do Prottipo de Rede CAN. ................................. 43 Figura 2.18 Prottipo da rede CAN montado em uma protoboard. .................. 44
11
LISTA DE TABELAS
Tabela 2.1 - Relao entre algumas taxas de transmisso e as distancias mximas suportadas ................................................................................................. 22 Tabela 3.1 - Planilha de Custos para Execuo do Projeto. ............................... 45
12
SUMRIO
1. INTRODUO ................................................................................................ 14 1.1. DESCRIO DO PROBLEMA.................................................................. 14 INFORMAES GERAIS SOBRE A EMPRESA: ............................................. 15 1.2. JUSTIFICATIVAS ..................................................................................... 17 1.3. OBJETIVOS.............................................................................................. 18 1.3.1. Objetivos gerais ................................................................................. 18 1.3.2. Objetivos especficos ......................................................................... 18 2. METODOLOGIA ............................................................................................. 19 2.1. ESTADO DA ARTE DO SISTEMA ............................................................ 19 2.1.1. Universal Serial Bus (USB) ................................................................ 19 2.1.1.1. Descritores .................................................................................. 20 2.1.1.2. Classes de dispositivos ............................................................... 21 2.1.1.2.1. Human Interface Device (USB-HID) ..................................... 21 2.1.1.2.2. Communication Device Class (USB-CDC) ........................... 21 2.1.2. Controller Area Network (CAN) .......................................................... 21 2.1.2.1. Prioridade e identificador de mensagem ..................................... 22 2.1.2.2. Tratamento de erros .................................................................... 23 2.1.2.3. Componentes necessrios para o desenvolvimento da rede ...... 23 2.1.2.3.1. MCP 2510 ............................................................................. 23 2.1.2.3.2. MCP 2551 ............................................................................. 23 2.1.3. IEEE 802.15.4 .................................................................................... 23 2.1.3.1. Camada fsica ............................................................................. 24 2.1.3.2. Subcamada MAC ........................................................................ 25 2.1.4. ZigBee ............................................................................................... 25 2.1.4.1. Tipologia da rede ......................................................................... 26 2.1.4.1.1. Estrela (Star) ......................................................................... 27 2.1.4.1.2. Malha (Mesh) ........................................................................ 27 2.1.4.1.3. rvore (Tree)......................................................................... 28 2.1.5. Ferramentas Computacionais ............................................................ 28 2.1.5.1. Linguagem de programao C .................................................... 28 2.1.5.2. Linguagem de programao Java ............................................... 28
13
2.1.5.3. Interface de Desenvolvimento Netbeans ..................................... 29 2.1.5.4. Interface de Desenvolvimento Eclipse ........................................ 29 2.1.5.5. MySQL ........................................................................................ 29 2.1.6. Microcontroladores ............................................................................ 29 2.1.6.1. Microcontroladores PIC ............................................................... 30 2.1.6.1.1. Microcontrolador PIC 18F2550 ............................................. 31 2.1.6.1.2. Microcontrolador PIC 18F4550 ............................................. 31 2.1.6.1.3. Microcontrolador PIC 18F2580 ............................................. 31 2.2. DESENVOLVIMENTO DA INTERFACE GRFICA .................................. 32 2.3. DESENVOLVIMENTO DE UM PROTTIPO DE COMUNICAO ENTRE UM COMPUTADOR E A REDE ZIGBEE................................................................ 36 2.4. DESENVOLVIMENTO DE UM PROTTIPO DE COMUNICAO ENTRE A REDE CAN E A REDE ZIGBEE. ......................................................................... 40 2.5. DESENVOLVIMENTO DE UM PROTTIPO DE COMUNICAO ATRAVS DE REDE CAN ..................................................................................... 42 3. PLANILHA DE CUSTOS ................................................................................ 45 4. CRONOGRAMA DE ATIVIDADES................................................................. 46 5. RESULTADOS OBTIDOS .............................................................................. 48 6. CONCLUSES ............................................................................................... 49 REFERENCIAS BIBLIOGRFICAS................................................................... 50 ANEXO A DATASHEET DO MICROCONTROLADOR PIC18F2550/4550 .... 53 ANEXO B DATASHEET DO MICROCONTROLADOR PIC18F2580 ............. 55 ANEXO C DATASHEET DO TRANSCEIVER CAN MCP2551 ....................... 57 ANEXO D DATASHEET DO CONTROLADOR CAN MCP2510 ..................... 58 ANEXO E DATASHEET XBEE SERIES 2 ...................................................... 59
14
1.INTRODUO
Neste trabalho apresentado o projeto construtivo de um sistema de aquisio de dados, atravs de radiofrequncia, de uma rede de comunicao de dados. O sistema de aquisio utiliza o protocolo USB (Universal Serial Bus) para a transmisso dos dados para o computador, onde neste as informaes
transportadas pela rede sero catalogados, tratados e armazenados, onde o usurio do sistema poder visualiza-los em uma interface grfica amigvel e de utilizao confortvel. A rede de comunicao ser desenvolvida utilizando o padro CAN (Controller Area Network), onde nesta estaro dispostos dispositivos eletrnicos para a atuao e tambm para sensoriamento. A utilizao de radiofrequncia se dar no transporte das informaes da rede at o sistema de aquisio, onde sero estudos possveis caso de reduo na taxa de transmisso, aumento da taxa de erros ou possveis incompatibilidades do modelo.
1.1.DESCRIO DO PROBLEMA
Com a nova lei 12.334/2010 que institui a Poltica Nacional de Segurana de Barragens e cria o Sistema Nacional de Informaes sobre Segurana de Barragens, sendo um dos seus objetivos promover o monitoramento e o acompanhamento das aes de segurana empregadas pelos responsveis por barragens, os sistemas de monitoramentos estaro sendo empregados em escala cada vez maior criando assim a necessidade da aquisio e armazenamento destes dados. O protocolo de comunicao CAN criado para uso automotivo sendo a sua aplicao mais comum a em dispositivos eletrnicos dentro de veculos. Nos ltimos vinte anos este protocolo apresentou diversas vantagens sobre os outros, sendo assim este vem se tornando cada vez mais utilizados em outros setores da indstria, sendo aplicado em sensores de voo e sistemas de navegao de aeronaves ou at mesmo em aplicaes aeroespaciais [1]. Esta expanso em seus setores de aplicao se d por motivo do baixo custo e de fcil implementao. Juntamente com essa expanso veio a necessidade de armazenamentos dos dados desta rede em um banco de dados, para a posterior consulta e checagem da condio do sistema.
15
INFORMAES GERAIS SOBRE A EMPRESA:
A Unioeste-Foz teve seu incio atravs da criao da Faculdade de Cincias Sociais Aplicadas de Foz do Iguau - FACISA em agosto de 1979 pela FUNEFI Fundao Educacional de Foz do Iguau, oferecendo os cursos de Administrao e Cincias Contbeis [2]. De abril de 1987 a dezembro de 1987, a entidade mantenedora passou a ser Fundao Federao de Instituies do Ensino do Superior do Oeste do Paran, constituindo-se no grande marco do processo de estadualizao das Faculdades de Cascavel, Foz do Iguau, Toledo e Marechal Cndido Rondon [2]. O Decreto n 399 de 27 de abril de 1987, institui a Fundao Federao Estadual de Instituies de Ensino Superior do Oeste do Paran e nomeou tambm a comisso de Implantao da FUNIOESTE. A Lei n 8.680 de 30 de dezembro de 1987, autorizou o Poder Executivo a instituir a Fundao Universidade Estadual do Oeste do Paran, ou seja, transformou a Fundao Federeo em Fundao Universidade. O Decreto n 2.700 de 27 de janeiro de 1988 (DOU n 2.700 28.01.88), criou a Fundao Universidade Estadual do Oeste do Paran e nomeou a Comisso de Implantao para representar o Estado na instituio e instalao da Fundao [2]. A partir de Janeiro de 1988 a entidade mantenedora passa a ser a FUNIOESTE - Fundao Universidade Estadual do Oeste do Paran, conforme Decreto n 2.352 de 27 de janeiro de 1988 - DOU n 2700 de 28.01.88. Em 16 de Julho de 1991 atravs n 9.663 o Governador transforma as Fundaes Estaduais em Autarquias. Em 23 de dezembro de 1994 com a publicao da Portaria n 1784-A do Ministrio da Educao e do Desporto, foi reconhecida a Universidade Estadual do Oeste do Paran - UNIOESTE, com seu novo Estatuto e Regimento de forma MultiCampi, transformando-as em Campi da UNIOESTE [2]. Instalaes Fsicas: 1979 - Iniciou as atividades no prdio da ACIFI e depois nas
dependncias da Escola Parigot de Souza, que nela permaneceu at 1982 [2]. 1982/1982 - Com o contrato de comodato assinado com Estado, a
FACISA passou a ocupar s dependncias do Colgio Estadual Baro do Rio Branco [2].
16
1985 - Com a implantao dos Cursos de Letras e Turismo passou a
ocupar parte das dependncias do Colgio Anglo-Americano da Vila "A", cedidas em comodato, paralelamente com o Colgio Baro do Rio Branco [2]. 1991 - A Direo do Colgio - Anglo Americano no concorda com a
renovao do contrato de comodato e a FACISA muda-se para o antigo Colgio Anglo-Americano da Vila "C". Ocupando parte das instalaes, cedidas pela Prefeitura Municipal de Foz do Iguau, onde permaneceu at a construo da Sede Prpria [2]. 1995 - No dia 14 de fevereiro, j como UNOIESTE - Campus de Foz do
Iguau, por iniciativa do Diretor Administrativo Prof. Jos Vicente Corra Rodrigues a Instituio muda-se para a sua Sede prpria, na Estrada de Furnas, km 1,3 ocupando 36 (trinta e seis) salas de aula e instalando e uma delas, provisoriamente, a parte administrativa [2]. 1997 - No dia 17 de janeiro de 1997, o governador Jaime Lerner
inaugura as instalaes do Campus de Foz do Iguau, com a participao do Reitor da UNIOESTE Prof. Erneldo Schallenberger, do Diretor Geral Brasileiro da Itaipu Binacional Sr. Euclides Girolamo Scalco, Sr. Harry Daij Prefeito Municipal, assina convnio entre a UNIOESTE, o Conselho dos Municpios Lindeiros ao Lago de Itaipu, Prefeitura Municipal de Foz do Iguau e Itaipu Binacional para que o Instituto de Educao Ambiental faa parte do Campus de Foz do Iguau [2].
17
1.2.JUSTIFICATIVAS
Usualmente os computadores onde esto armazenados os bancos de dados no se encontram em lugares prximos ao local de passagem do barramento da rede, alm de algum lugares apresentarem difcil acesso, por esses motivos criou-se a necessidade da utilizao de meios de comunicao sem fio, facilitando assim a manuteno de todos os equipamentos que compem o sistema. Outro problema a falta de portas seriais em computadores mais atuais, como por exemplo, os notebooks, que no apresentam nenhuma porta serial apenas USB para a conexo com os equipamentos, por esse motivo a utilizao de microcontroladores possuindo o recurso de comunicao USB se faz necessria.
18
1.3.OBJETIVOS
1.3.1.Objetivos gerais
Este trabalho tem como meta desenvolver um sistema de aquisio de um sistema de monitoramento, que utiliza rede CAN, fazendo uso de radiofrequncia para a transmisso dos dados da rede para o computador onde estes seriam coletados atravs da porta USB do mesmo. Alm do desenvolvimento deste sistema este trabalho tambm visa a analise da confiabilidade deste sistema de aquisio.
1.3.2.Objetivos especficos
Fazer o estado da arte sobre sistemas automatizados que utilizam os protocolos de comunicao entre sistemas microcontrolados e
computadores; Desenvolvimento de uma interface grfica utilizando linguagem de programao Java para a comunicao entre microcontroladores PIC (Programmable Interface Controller) e o computador (comunicao via USB); Desenvolvimento de um prottipo em bancada para testar a comunicao USB entre o PIC e o PC (Personal Computer); Analisar os resultados obtidos com o primeiro prottipo; Incluir um rede Zigbee (RF Radio frequency) juntamente com o sistema de aquisio de dados via rede CAN para verificar a eficincia desses protocolos de comunicao com o circuito PIC-PC; Analisar a eficincia do sistema completo e publicao dos resultados em meios cientficos.
19
2.METODOLOGIA
Para o desenvolvimento do sistema completo e a realizao de teste foram necessrios alguns estudos sobre os vrios tipos de sistemas microcontrolados existentes e tambm como estes sistemas se comportam quando so utilizados em conjunto vrios protocolos de comunicao.
2.1.ESTADO DA ARTE DO SISTEMA
O sistema a ser desenvolvido realizara a juno de diversos protocolos de comunicao de dados para tornar possvel a aquisio dos dados de uma rede e transmitir os mesmos at um servidor onde estas informaes seriam armazenadas, catalogadas e manipuladas, para um melhor entendimento do usurio final. Sendo assim foram necessrios estudos sobre alguns protocolos de comunicao para o desenvolvimento do sistema de aquisio, esses sendo escolhidos por serem aqueles comumente utilizados em sistemas microcontrolados e em sistemas de redes embarcadas. Foram pesquisados alguns exemplos de sistemas semelhantes ao proposto, sendo encontrados um trabalho realizado sobre a conexo de microcontroladores ao computador utilizando a porta USB [3], e outro projeto sobre a interface entre duas redes CAN com a utilizao de radiofrequncia atravs da utilizao do protocolo ZigBee [4]. A pesquisa foi concentrada na utilizao de sistema com a utilizao de softwares gratuitos ou que possuam verso de demonstrao, tambm foi adotado como premissa a utilizao de linguagens de programao para o desenvolvimento da interface grfica onde a criao de threads fosse intuitiva, possuir extenso gama de bibliotecas prontas, ser uma linguagem portvel. Outra premissa adotada foi de a pesquisa ser realizada somente com projetos, e ou trabalhos de datas posteriores ao ano de 2006.
2.1.1.Universal Serial Bus (USB)
Como a grande diversidade de protocolos de comunicao de dados e conectores padres algumas empresas perceberam a necessidade de se
20
desenvolver um novo que fosse universal, de fcil implementao em qualquer dispositivo, baixo custo de desenvolvimento, ter uma documentao vasta para oferecer suporte ao usurio, ser Plug-and-Play, ter uma velocidade de transmisso de dados alta e sendo tornando assim o protocolo nico e fcil de configurar pelo usurio. Foram desenvolvidas diversas verses, sendo a principal diferena entre elas a velocidade de comunicao, sendo na verso 1.1 de 1,5 Mbps at 12 Mbps ( Lowspeed e Full-speed, respectivamente), na verso 2.0 de 480 Mbps (High-speed) e a ultima desenvolvida at o momento a 3.0, designada comercialmente como USB SuperSpeed, possuindo velocidade de transferncia de 4,8 Gbps. Outras caractersticas importantes alteradas nesta ultima atualizao so a corrente mxima suportada pelo barramento USB, onde nas outras verses era de 500 mA e passando para 900 mA, e tambm a do padro ser agora full-duplex, ou seja os dados so transferidos bidireccionalmente, sendo assim os equipamentos
conectados podem transmitir informaes simultaneamente [3].
2.1.1.1.Descritores
As informaes dos dispositivos, como tipo do dispositivo, identificao do fabricante, nmero de srie do produto e entre outros, so todas armazenadas na hierarquia de descritores dos dispositivos. Na primeira camada desta hierarquia de descritores est disponvel o descritor de dispositivo, nesse onde as informaes sobre o tipo, a classe, o nome, o fabricante do dispositivo, entre outras informaes do mesmo so armazenadas. O segundo nvel desta hierarquia esto localizados os descritores de configurao, onde so armazenadas as informaes de alimentao, numero de interface e outras configuraes do dispositivo. Seguindo a hierarquia existe o descritor de interface que informa a relao entre o dispositivo e o endpoint. E na ultima camada existe o descritor de endpoint onde este informa ao host sobre as vias de comunicaes existentes [3].
21
2.1.1.2.Classes de dispositivos
O protocolo tambm define cdigos de classes que so utilizados para identificar a funcionalidade do dispositivo e assim carregando o driver desenvolvido para a funo especificada Esta caracterstica possibilita aos programadores criarem novos drivers suportando diferentes dispositivos de diversos fabricantes que utilizem um determinado cdigo de classe.
2.1.1.2.1.Human Interface Device (USB-HID)
Esta classe de dispositivo torna possvel a conexo do dispositivo sem a necessidade de instalao de driver no host, tornando assim o uso em teclados e mouses muito comum, facilitando assim a venda destes equipamentos e a conexo destes com o computador. Entre as desvantagens desta classe esto a velocidade de transmisso dos dados e a criao do descritor HID Report, pois nesse descritor que esto armazenadas as informaes dos dados enviados ao host [5].
2.1.1.2.2.Communication Device Class (USB-CDC)
Comumente utilizada em modems e outros dispositivos de comunicao, pois quando o equipamento conectado a um host o mesmo simula uma interface serial (porta com virtual). Sendo assim, a mesma torna-se de fcil desenvolvimento e utilizao [6]. Algumas desvantagens so; Viola o padro de comunicao USB; No funciona com algumas verses de Linux; Necessita de driver especifico, apesar dos sistemas operacionais mais modernos j inclurem os mesmos.
2.1.2.Controller Area Network (CAN)
Protocolo desenvolvido para ser utilizado em redes automotivas interligando e possibilitando os componentes eletrnicos dos automveis se comunicarem, mas
22
hoje em dia um protocolo bastante difundido nas redes industriais, sendo muito implementando em sistemas de monitoramento por ter sido baseado em aplicaes de tempo-real (real-time aplications). A taxa de transmisso de dados pode chegar at 1 Mbps, mas ao se utilizar esta taxa de transmisso diminui-se a mxima distancia da rede (Tabela 2.1) [3].
Tabela 2.1 - Relao entre algumas taxas de transmisso e as distancias mximas suportadas
Taxa de transmisso Distancia mxima do barramento 1 Mbps 500 Kbps 250 Kbps 125 Kbps 40 m 100 m 200 m 500 m
FONTE: Wolfram, T. Bridging two CAN-bus segments using radio communication with the IEEE 802.15.4 protocol. Tese de Mestrado Engenharia Eltrica, Ingenjrshgskolan, Hgskolan, Jnkping, 2009.
2.1.2.1.Prioridade e identificador de mensagem
Para realizar o envio de uma mensagem um dispositivo deve verificar o barramento da rede e ao se apresentar livre a mensagem poder ser enviada, mas se o mesmo estiver ocupado, outro dispositivo estar enviando uma mensagem, este primeiro deve esperar o barramento se tornar livre novamente para ento enviar sua mensagem, no importando a prioridade da sua mensagem. Se dois dispositivos pretendem enviar uma mensagem ao mesmo tempo, os mesmos enviam apenas o inicio da mensagem (parte contendo a prioridade da mesma), sendo assim a prioridade da mensagem verificada e ento a mensagem cuja prioridade for maior enviada e logo aps a mensagem de prioridade menor ser envidada. Esta prioridade de mensagem dada pela utilizao de identificadores de mensagem e quanto menor o valor do mesmo maior a sua prioridade [7]. Como o protocolo utiliza o conceito de mensagens geradas por broadcast, as mesmas apresentam um identificador que representa o n onde foi originada a mensagem, sendo assim os demais ns utilizariam a mesma por apenas verificar o identificador. No padro CAN 2.0A o identificador composto por 11 bits, sendo
23
maior no padro CAN 2.0B onde o mesmo de 29 bits. Um dispositivo utilizando o padro 2.0B consegue utilizar as mensagens do 2.0A, mas isso no ocorre no sentido contrario.
2.1.2.2.Tratamento de erros
Como todos os ns devem receber as mensagens, ao ser detectado um erro no envio da mensagem o envio cessado e ento a mensagem ser retransmitida para todos os ns da rede at no serem encontrados mais erros. Nessa retransmisso da mensagem no tem como saber se ela ser enviada logo em seguida ou se alguma mensagem com o identificador menor ser enviado antes. Por ser uma rede robusta e se o barramento for instalado adequadamente pode-se dizer que a taxa de erros da rede ser praticamente nula [3].
2.1.2.3.Componentes necessrios para o desenvolvimento da rede
2.1.2.3.1.MCP 2510
Este CI (Circuito Integrado) um controlador CAN autnomo, desenvolvido para simplificar as aplicaes que requerem a conectividade com a rede. O microcontrolador se conecta com este controlador atravs de SPI (Serial Peripheral Interface Bus), utilizando os comandos do mesmo para escrita e leitura [8].
2.1.2.3.2.MCP 2551
Este CI um transceiver CAN de alta velocidade, utilizado para a conexo entre o controlador da rede e o barramento da mesma. Este equipamento fornece a capacidade de transmisso e recebimento diferencial para o controlador da rede [9].
2.1.3.IEEE 802.15.4
Este padro foi desenvolvido para suprir as necessidades de aplicaes de baixo-consumo de energia atravs de redes sem fio.
24
um protocolo de pacote de dados baseados em redes CSMA/CA (Carrier Sense Multiple Access with Collission Avoidance), ou seja, o acesso ao meio via acessos mltiplos com verificao de portadora com preveno de coliso sendo que antes de transmitir os dados o dispositivo deve avisar a rede sobre a transmisso e em quanto tempo enviara a mensagem. A segurana realizada de modo a cada camada combater e atuar contra as possveis ameaas a serem encontradas nas redes de transmisso sem fio [10]. O padro IEEE 802.15.4 Full Function Devices possuir trs modos de operao: PAN (Personal Area Network) Coordinator: sendo o principal dispositivo da rede, pois para se criar uma rede com este protocolo devemos ter apenas um dos dispositivos operando neste modo onde este identificara sua prpria rede e as configuraes da mesma; PAN Router: ao termos um dispositivo neste modo de operao o mesmo deve se associar a um PAN Coordinator antes de se comunicar, ou seja, ele no cria a sua rede, mas aps a sua associao qualquer outro dispositivo poder se associar ao mesmo. Um dispositivo configurado como Pan Router devera fornecer os servios de sincronizao para os outros dispositivos que no conseguem se comunicar com o PAN Coordinator. PAN End Device: este dispositivo deve se associar a um PAN Coordinator ou a um PAN Router antes de se comunicar com a rede.
2.1.3.1.Camada fsica
Por este protocolo utilizar a modulao especificada e a tcnica de espalhamento espectral , DSSS (Direct Sequence Spread Spectrum), ou seja, o espalhamento espectral faz uma varredura pelos canais de comunicao da frequncia em um sequencia direta, o mesmo se torna um protocolo pouco suscetvel s interferncias eletromagnticas podendo operar em ambientes agressivos onde outros padres de comunicao sem fio falham [11]. Algumas das principais tarefas da camada fsica deste protocolo so: Ativao ou desativao do transmissor de radio; Seleo das frequncias dos canais
25
Deteco dos nveis de energia do sinal
As faixas de frequncia de operao deste protocolo esto relacionadas com as bandas de frequncia ISM (Industrial, Scientifical and Medical), sendo elas: 868 MHz possuindo nesta faixa de frequncia um nico canal; 915 MHz opera na faixa de frequncia, 902 a 928 MHz, possuindo 10 canais; 2.4 GHz esta a mais utilizada dentro deste padro, sendo a faixa de 2.4 a 2.5 GHz, possuindo 16 canais.
2.1.3.2.Subcamada MAC
Conhecida como camada de controle de acesso ao meio, esta suporta dois meios de operao: Non-beacon enabled mode: Quando um dispositivo Pan Coordinator seleciona este modo no existe envio de beacons, ou seja, no h o envio de uma estrutura sinalizadora, exigindo aos dispositivos PAN Routers estarem continuamente ativos, necessitando uma fonte de energia maior. Beacon enabled mode: neste modo os PAN Routers devem periodicamente enviar beacons para confirmar a presena dos mesmos na rede, permitindo assim aos demais dispositivos a reconhecerem a sua presena [12].
2.1.4.ZigBee
um padro de comunicao de dados para redes sem fio de baixo custo e de baixo consumo, desenvolvido para substituir o uso do Bluetooth em redes WPAN (Wireless Personal Area Network). Este baseado no padro IEEE 802.15.4 de redes sem fio com baixa taxa de transmisso de dados, ou seja, as LR-WPANs (Low Rate Wireless Personal Area Network). O mesmo vem ganhando um grande espao no mercado e na indstria proporcionando uma grande disperso da tecnologia para a sua utilizao em sistemas de controle e/ou monitoramento. Este protocolo tambm fornece flexibilidade para as WSNs (Wireless Sensor Networks) [13].
26
Este protocolo complementa outras camadas do modelo ISO/OSI juntamente com o padro IEEE 802.15.4, onde este implementa as camadas fsicas e a de enlace e o ZigBee constitui nas camadas de rede e de aplicao (Figura 2.1).
Figura 2.1 - Camadas do modelo ISO/OSI definidas pelos padres IEEE 802.15.4 e ZigBee
Os dispositivos ZigBee possuem 3 modos de operao que seguem o padro IEEE 802.15.4, sendo eles: ZigBee Coordinator (ZC): o dispositivo com a finalidade de criar a rede e configurar os parmetros da mesma, sendo associado ao PAN Coordinator; ZigBee Router (ZR): referido como PAN Router, este o dispositivo responsvel pelo roteamento das mensagens dentro da rede; ZigBee End Device (ZED): referido tambm como PAN End Device, este dispositivo no permite outros dispositivos se associarem a ele e tambm no participa do roteamento, sendo um n da rede atuando como sensor e ou atuador. Quando um dispositivo ZC finaliza a criao e configurao da rede ZigBee, o mesmo passara a atuar como um ZR [12].
2.1.4.1.Tipologia da rede
Este protocolo fornece a possibilidade de criao de redes de trs tipologias, sendo elas [11]:
27
2.1.4.1.1.Estrela (Star)
Este tipo de rede centralizado, sendo assim todas as informaes devem passar pelo coordenador para chegar ao seu destinatrio sobrecarregando assim o coordenador (Figura 2.2).
Figura 2.2 - Rede do tipo estrela e seus componentes FONTE: http://paginas.fe.up.pt/~ee01124/ZigBee.htm
2.1.4.1.2.Malha (Mesh)
Redes do tipo malha so descentralizadas sendo assim permitindo a um n se comunicar com qualquer outro dispositivo ao seu alcance. Esta tipologia de rede proporciona um aumento na vida til das fontes de energia dos equipamentos por permitir um consumo de energia mais eficiente ao no serem sobrecarregados os roteadores, e tambm fornece uma maior flexibilidade para a conexo de dispositivos, mas ao mesmo tempo aumenta a complexidade da rede (Figura 2.3).
Figura 2.3 - Rede do tipo malha e seus componentes FONTE: http://paginas.fe.up.pt/~ee01124/ZigBee.htm
28
2.1.4.1.3.rvore (Tree)
Com este tipo de rede o dispositivo possui apenas um nico caminho entre qualquer par de dispositivo, pois para grupo de dispositivos existira apenas um roteador e apenas um coordenador que identificara toda a rede (Figura 2.4).
Figura 2.4 - Rede do tipo rvore e seus componentes. FONTE: http://paginas.fe.up.pt/~ee01124/ZigBee.htm
2.1.5.Ferramentas Computacionais
2.1.5.1.Linguagem de programao C
Criada por Dennis M. Ritchie e Ken Thompson no laboratrio Bell em 1972, sendo uma linguagem poderosa como ferramenta de programao de qualquer tipo de sistema, como exemplo o sistema operacional UNIX. Foi desenvolvida para possibilitar ao usurio a planejar programas estruturados e modulares, tornando o cdigo mais legvel e documentado [14].
2.1.5.2.Linguagem de programao Java
Esta foi desenvolvida na dcada de 90, pela empresa Sun Microsystems, e sendo compilada para um bytecode interpretado pela maquina virtual,
diferentemente das demais linguagens onde so compiladas para um cdigo nativo da maquina, sendo derivada das sintaxes de C/C++.
29
Possui uma vasta gama de aplicaes, sendo muito utilizada para sistemas onde h a necessidade de portabilidade, ou seja, onde existe a necessidade da execuo do programa em diversos sistemas operacionais diferentes e hardwares diferentes. Esta portabilidade possvel devido a sua compilao ser realizada atravs de uma maquina virtual Java, a chamada JVM (Java Virtual Machine) [15].
2.1.5.3.Interface de Desenvolvimento Netbeans Netbeans um ambiente de desenvolvimento integrado (IDE Integrated Development Enviroment), sendo utilizada para a compilao, depurao e execuo e instalao de aplicaes. Esta interface pode ser utilizada em diversas plataformas (sistemas operacionais) [16].
2.1.5.4.Interface de Desenvolvimento Eclipse
Eclipse um ambiente de desenvolvimento de softwares, desenvolvido em linguagem Java, podendo ser usado tanto para a programao de aplicativos tanto em Java quanto diversas outras linguagens de programao atravs do seu sistema de plug-ins [17].
2.1.5.5.MySQL
MySQL um sistema de gerenciamento de bancos de dados, nomeado em homenagem a filha do criador, My. Um banco de dados no MySQL permite criar uma estrutura de tabelas relacionadas entre si. Este sistema desenvolvido em C e C++, sendo de codigo aberto e freeware [18].
2.1.6.Microcontroladores
Microcontroladores,
comumente
chamados
de
MCU,
so
pequenos
computadores, ou seja, so chips inteligentes possuindo processador, memoria e diferentes tipos de perifricos de entrada/sada. O maior diferencial destes pequenos circuitos integrados, ao de um microprocessador de uso geral, o de serem totalmente programveis para realizarem diversas funes sendo assim usualmente
30
embarcados dentro de algum produto comercial, controlando todas as aes deste. Os microcontroladores integram diversos elementos adicionais em suas estruturas internas, como memoria de leitura e escrita (armazenamento de dados), memoria somente de leitura para o armazenamento de programas, e vrios dispositivos perifricos como converses analgicos/digitais e interfaces de entrada e sada de dados [19]. Estes dispositivos trabalham com frequncias de clock baixas comparadas com os processadores atuais, no entanto esta velocidade de processamento adequada para a maioria das aplicaes. Estes componentes so dimensionados nos projetos para minimizar o custo de produo do equipamento, tornando um erro o seu superdimensionamento, pois o custo adicional de cada um destes ser multiplicado pela quantidade de produtos produzidos pela empresa. O projetista possui uma gama enorme de produtos para escolher sendo as principais diferenas em quantidades de pinos de entrada/sada, tenso de alimentao, perifricos internos, velocidade de processamento, e principalmente as quantidades de memoria interna, tanto para armazenamento de dados quanto para o armazenamento das instrues a serem realizadas [20].
2.1.6.1.Microcontroladores PIC
PIC so uma das famlias de microcontroladores fabricados pela empresa Microchip Technology, possuindo diversos nveis de processamentos de dados. O seu nome originou-se de Programmable Interface Controller (Controlador de Interface Programvel). Estes possuem uma extensa variedade de modelos e perifricos internos, alguns destes perifricos so: USARTs Controladores de Comunicao I2C, SPI, USB, Ethernet e CAN; Controladores PWM (Pulse-width modulation); Controladores de Displays de LCD (Liquid Crystal Display); Watchdog timer; Osciladores Internos; RTCC - Real Time Clock and Calendar (Relgio e Calendrio de tempo real);
31
Detectores de falhas na alimentao.
Como qualquer outro microcontrolador estes aceitam apenas programaes em linguagem assembly, mais conhecida como linguagem de maquina. No entanto existem diversos compiladores de linguagem de alto nvel, como o MikroC da empresa MikroEletronika e o PCW da empresa CCS Info, ou at mesmo o SDCC que pode ser configurado para operar com o MPLAB, compilador assembly da empresa Microchip, sendo este ultimo open-source [21].
2.1.6.1.1.Microcontrolador PIC 18F2550
Este microcontrolador da famlia PIC ideal para aplicaes de baixo consumo (nanoWatt) e de conectividade, pois possui o beneficio de diversos tipos de controladores de comunicao, sendo o USB o mais atrativo. O controlador USB deste microcontrolador pode ser utilizado como Low-Speed USB ou como Full-Speed, sendo compatvel com a tecnologia USB V2.0. Outra caracterstica importante deste o regulador de tenso embutido para o controlador USB no necessitando de nenhum componente externo adicional, tornando a utilizao desta tecnologia simples e de baixo-custo [22].
2.1.6.1.2.Microcontrolador PIC 18F4550
Este circuito integrado possui as mesmas funes do PIC18F2550, com a vantagem de apresentar mais pinos de entrada/sada, possibilitando seu uso em aplicaes de grande porte onde existe necessidade de controle de um numero maior de equipamentos [22].
2.1.6.1.3.Microcontrolador PIC 18F2580
Este componente pertencente famlia PIC da empresa microchip, possui diversos recursos, como a tecnologia nanoWatt, permitindo a utilizao deste em aplicaes que necessitem baixo consumo de energia, podendo ser alimentado por pequenas baterias, e o controlador ECAN interno, sendo este ultimo compatvel com a especificao do protocolo CAN 2.0B permitindo mensagens com taxas de at 1 Mbps [23].
32
2.2.DESENVOLVIMENTO DA INTERFACE GRFICA
A interface grfica foi desenvolvida utilizando linguagem de programao Java, e o proposito desta interface a visualizao dos dados e armazenamento em um banco de dados, tornando esta visualizao fcil e cmoda para o usurio, este podendo realizar consulta s tabelas de sensores e de aquisies. Uma das premissas utilizadas para a construo desta interface foi a possibilidade de utilizao da mesma em qualquer sistema operacional (Linux e Windows), tornandoa multi-plataforma. Para o auxilio na construo desta interface foi utilizada a IDE Eclipse, juntamente com um plugin de auxilio, chamado Jigloo. Este plugin torna possvel a visualizao instantnea das janelas construdas para o programa, assim como no Netbeans, tornando a produo desta mais confortvel, no necessitando da compilao e da execuo do programa a cada alterao. Para a comunicao com a porta serial do computador foi utilizada uma API, esta chamada de RxTxComm, se fez necessria o utilizao da mesma pois Java no oferece suporte a esta funo nativamente, sendo possvel apenas atravs de bibliotecas externas. Para o armazenamento dos dados foi utilizado o banco de dados MySQL, sendo este formado por duas tabelas, uma onde sero armazenados os dados de cada sensor, como o local da instalao, ID (identificador), nome, tipo de sensor e tambm uma descrio sobre o mesmo. A outra tabela armazenar as informaes das aquisies, como o ID desta aquisio, o ID do sensor ao qual esta mensagem pertence, a mensagem ou a aquisio propriamente dita e por ultimo a data e hora desta. A forma de ligao das duas tabelas de 1:N, ou seja, podem existir muitas aquisies para um sensor, mas cada aquisio s pertence a um nico sensor (Figura 2.5).
33
Figura 2.5 - Digrama EER do banco de dados.
Na tela inicial tem-se uma interface onde o usurio pode visualizar as aquisies em tempo real (Figura 2.6). Isto foi possvel com a utilizao de threads, que so nada menos do que uma ou mais tarefas realizadas simultaneamente, dentro de um nico programa, sincronizadas ou no. Nesta tela est presente o boto utilizado para a conexo com a porta Serial e tambm uma caixa de texto com um boto para o envio de mensagens para os sensores.
Figura 2.6 - Tela Inicial da Interface Grfica.
A tela da figura 2.7 utilizada para o cadastro das informaes sobre cada sensor no banco de dados, possuindo todos os campos necessrios para o armazenamento no banco de dados.
34
Figura 2.7 - Tela de Cadastro dos Sensores.
Na tela da figura 2.8 possvel realizar a consulta tabela de sensores do banco de dados, esta consulta pode ser realizada atravs do ID do sensor, do seu tipo, nome, local de instalao ou da sua descrio. Tambm possvel mostrar apenas as colunas selecionadas, facilitando a visualizao das informaes de cada sensor.
Figura 2.8 - Tela de Listagem dos Sensores Cadastrados.
35
A figura 2.9 apresenta a tela onde possvel a pesquisa e visualizao das aquisies armazenadas na sua respectiva tabela no banco de dados. Esta pesquisa pode ser realizada atravs do ID do sensor ao qual representa esta aquisio, atravs da prpria mensagem armazenada, ou atravs da sua data e hora, podendo apresentar apenas as informaes dos sensores em um determinado momento possibilitando ao usurio saber o atual estado do sistema, ou em parte do mesmo.
Figura 2.9 - Tela de Listagem das Aquisies Armazenadas.
Na ultima tela (Figura 2.10) pode ser feita a configurao da porta serial em que o programa estar recebendo as mensagens dos sensores, para a realizao da mesma se faz necessrio detectar as portas COM presente no computador no momento, atravs do boto Reconhecer Portas, em seguida selecionar a porta desejada na combo box (caixa de combinao), escolher um baudrate (velocidade de comunicao com a porta serial) predeterminado, salvar as informaes escolhidas atravs do boto Salvar e por ultimo voltar a tela inicial do programa e conectar a esta porta atravs do seu respectivo boto
36
Figura 2.10 - Tela de Configurao da Comunicao com a Porta Serial.
2.3.DESENVOLVIMENTO DE UM PROTTIPO DE COMUNICAO ENTRE UM COMPUTADOR E A REDE ZIGBEE.
Foi desenvolvido um prottipo com a finalidade de receber os dados da rede ZigBee e repass-los para o computador atravs de uma porta USB, para isso foi necessrio primeiramente a construo do circuito eltrico presente na figura 2.11 . Neste circuito est presente o microcontrolador PIC18F2550, que realizara a comunicao com a interface grfica presente no computador atravs da porta USB, simulando uma porta COM, um XBee, responsvel pela comunicao da rede ZigBee com o microcontrolador, um regulador de tenso LM317, pois a tenso no modulo XBee de 3.3V e a tenso fornecida pela porta USB de 5V, e tambem 3 LEDs de indicao, um para a conexo do microcontrolador com o computador, um para o XBee ao liga-lo e o ultimo para a representao da associao a rede do XBee.
37
Figura 2.11 - Circuito de Comunicao entre o Computador e a Rede ZigBee
38
Aps serem realizados diversos testes para o bom funcionamento do circuito em uma protoboard, este foi passado para uma placa de fenolite onde todos os componentes foram soldados e testados novamente tendo-se como um produto final apresentado na figura 2.12
Figura 2.12 - Placa Final de Comunicao entre o Computador e a rede ZigBee.
O modulo XBee requer uma programao adicional para o seu funcionamento como coordenador da rede, esta se faz atravs do programa X-CTU, disponvel no site da prpria empresa fabricante dos mdulos, e um conversor de USB para RS232. Os mdulos veem pr-programados com um firmware bsico, este sendo com o baudrate de 9600 bps e configurado como roteador da rede, por isso necessrio alterar estas configuraes, para isso devemos escolher na tela inicial do programa a porta serial que se comunica com o modulo (Figura 2.13), escolher o velocidade de comunicao adequada e realizar um teste das configuraes atravs do boto Test/Query onde estando corretas as informaes dever retornar com o nome do modulo e sua verso de firmware.
39
Figura 2.13 - Tela Inicial do Programa X-CTU.
Depois de feito os passos corretamente deve-se abrir a aba Modem Configuration (Figura 2.14) e ler as informaes gravadas na memoria interna do modulo atravs do boto Read. Aps realizada a leitura deve-se alterar os parmetros, e ou tipo de funo do modulo para o funcionamento desejado. Os mdulos podem operar em 2 modos, o modo AT (transparente) e o API, o que diferencia estes so os pacotes de dados transmitidos e recebidos, no modo AT o modulo opera como um substituto de uma comunicao serial padro e no API o mesmo possui estrutura definida de comunicao. Para este trabalho foi configurados todos os mdulos como modo transparente e com baudrate de 115200 bps. Para este prottipo o modulo foi definido como sendo o coordenador da rede ZigBee, tornando a criao da rede apenas possvel ao se conectar este no computador.
40
Figura 2.14 - Tela de Configurao do Modulo.
2.4.DESENVOLVIMENTO DE UM PROTTIPO DE COMUNICAO ENTRE A REDE CAN E A REDE ZIGBEE.
Este prottipo possui a finalidade de aquisio das mensagens do barramento da rede CAN e a transmisso destas atravs da rede ZigBee at o computador, onde sero catalogadas e armazenadas. Para a construo do mesmo foi necessrio a construo de um circuito eltrico (Figura 2.15). Neste circuito encontra-se um microcontrolador PIC18F2580, programado para a recepo dos dados e a retransmisso destes atravs do modulo UART para o componente XBee. O modulo XBee, representando por duas barras de pinos, foi devidamente programado como roteador, assim como explicado anteriormente. Neste circuito tambm se fazem presentes o transceiver da rede CAN (MCP2551), 2 LEDs de indicao para o modulo XBee e um regulador de tenso LM317.
41
Figura 2.15 - Circuito Eltrico do Prottipo de Comunicao entre a Rede CAN e a rede ZigBee.
42
Figura 2.16 - Placa do Prottipo de Comunicao da Rede CAN com a Rede ZigBee.
Depois de serem realizados os testes do circuito este foi passado para uma placa de fenolite (Figura 2.16), onde todos os componentes necessrios foram soldados, facilitando o seu manuseio e diminuindo o risco de problemas no mesmo.
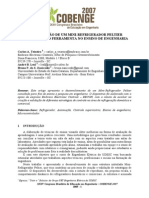
2.5.DESENVOLVIMENTO DE UM PROTTIPO DE COMUNICAO ATRAVS DE REDE CAN
Este prottipo foi desenvolvido com o proposito de representar um sistema de monitoramento de instrumentao de barragens, onde as informaes destes estariam trafegando numa rede CAN. Para a montagem deste prottipo foi utilizado dois PIC18F4550, sendo estes programados em loop, ou seja, um destes envia um byte de inicializao, o outro microcontrolador recebe esta mensagem atravs da rede CAN e incrementa este byte e envia este para o primeiro PIC e finalmente este incrementa novamente este byte e o envia para o segundo PIC, e assim sucessivamente (Figura 2.17). Neste circuito tambm se encontram dois controladores de rede CAN MCP2510, pois o PIC utilizado no possui o controlador ECAN integrado, dois transceiver da rede CAN MCP2551, dois LEDs de indicao, um para cada microcontrolador indicar seu estado de funcionamento, e dois resistores, terminais do barramento da rede CAN com o valor de 120 Ohms cada.
43
Figura 2.17 - Circuito Eltrico do Prottipo de Rede CAN.
44
Este esquema eltrico foi montado, utilizando uma protoboard (Figura 2.18), para a realizao dos testes da rede e tambm do sistema, onde o mesmo no apresentou nenhuma falha, e atendeu a todas as necessidades do projeto.
Figura 2.18 Prottipo da rede CAN montado em uma protoboard.
45
3.PLANILHA DE CUSTOS
Tabela 3.1 - Planilha de Custos para Execuo do Projeto.
Quantidade 2 2 3 1 1 2 2 2 20 4 10 30 6 6 1 1 2 1 2 3 2 2
Valor Unitrio Valor Total CI - LM317 R$ 1,50 R$ 3,00 CI - MCP2510 R$ 5,60 R$ 11,20 CI - MCP2551 R$ 3,50 R$ 10,50 CI - PIC18F2550 R$ 15,70 R$ 15,70 CI - PIC18F2580 R$ 18,00 R$ 18,00 CI - PIC18F4550 R$ 21,00 R$ 42,00 CI - XBee Pro Series 2 R$ 120,00 R$ 240,00 CI - Xbee Series 2 R$ 100,00 R$ 200,00 Componente - Capacitor R$ 0,10 R$ 2,00 Componente - Cristal Oscilador R$ 1,50 R$ 6,00 Componente - LED R$ 0,50 R$ 5,00 Componente - Resistor R$ 0,10 R$ 3,00 Conector - Capa para DB9 R$ 1,50 R$ 9,00 Conector - DB9 R$ 1,20 R$ 7,20 Conector - USB Femea R$ 2,10 R$ 2,10 Estanho - Rolo de 500g 1mm R$ 45,00 R$ 45,00 Placa de Fenolite 10x10 R$ 2,50 R$ 5,00 Soquete - Barra de 40 Pinos R$ 2,00 R$ 2,00 Soquete - DIP 20 Pinos XBee R$ 3,00 R$ 6,00 Soquete - DIP 28 Pinos R$ 0,50 R$ 1,50 Soquete - DIP 40 Pinos R$ 1,20 R$ 2,40 Soquete - DIP 8 Pinos R$ 0,70 R$ 1,40 Total R$ 638,00
Itens
46
4.CRONOGRAMA DE ATIVIDADES
47
48
5.RESULTADOS OBTIDOS
O primeiro teste realizado foi com a interface grfica para o conhecimento na demora da recepo dos dados da porta serial, ento realizou-se um loop em que a informao enviada era retornada na prpria interface grfica, este teste apresentou um resultado onde a informao era recebida apenas 5 milissegundos aps o seu envio. O segundo teste realizado foi com o prottipo de comunicao da rede ZigBee e o computador, este teste consistiu em alterar a distancia do prottipo at o computador juntamente realizado com o teste acima, ou seja aumentar o comprimento do cabo USB conectado entre os mesmos e visualizar quanto alteraria na demora da mensagem recebida. Neste teste pode-se observar que para um comprimento de cabo de at 3m no foi alterado em nenhum milissegundo o resultado acima deste comprimento no foi testado. O terceiro teste consistiu em aumentar a distancia entre os mdulos da rede ZigBee e verificar o quanto tempo era afetado o envio e recebimento da mensagem. Neste teste observou-se com o mdulos o mais prximos possvel um do outro um pequeno aumento no tempo de recepo (8 milissegundos) e quando os mdulos eram separados uma distancia de 20 metros (indoors), estes apresentaram um tempo de recepo de 15 milissegundos, lembrando que estes testes foram realizados com o modulo XBee Series 2, com o modulo XBee Pro Series 2, este tempo abaixou para apenas 10 milissegundos. O quarto teste foi realizado para o conhecimento da distancia mxima entre os dois mdulos da rede ZigBee, consistindo em apenas aumentar a distancia sem se importar com o tempo de recepo, as distancias apresentadas foram de 27 e 63 metros (indoors), sendo estes resultados obtidos pelos mdulos XBee Series 2 e XBee Pro Series 2, respectivamente.
49
6.CONCLUSES
Durante o desenvolvimento deste projeto foram encontrados alguns problemas. O primeiro problema encontrado foi nas bibliotecas para a comunicao da interface grfica com a porta USB, pois como a premissa desta interface era ser multiplataforma e para poder atend-la as bibliotecas para esta comunicao tambm deveriam possuir suporte para ambos os sistemas (Windows e Linux), no caso para a comunicao USB-HID as bibliotecas disponveis no ofereciam este suporte, sendo necessrio trocar o tipo de comunicao com o computador passando a utilizar USB-CDC, e como o programa utilizado para a programao dos microcontroladores era o MikroC o qual no oferece bibliotecas para este tipo de comunicao foi necessrio trocar de compilador para o da empresa CCS Info, o PCW. Apesar dos dois compiladores serem em linguagem de programao C, os mesmos possuem instrues e funes diferentes, sendo necessrio aprender sobre o novo compilador escolhido. A grande vantagem na utilizao destes compiladores de ambos possurem verses de demonstrao sendo possvel a programao dos microcontroladores sem a necessidade da compra destes compiladores. Apesar dos problemas encontrados foi possvel obter resultados satisfatrios para o sistema desenvolvido, sabendo-se que ao se utilizar um XBee Pro as velocidades de transmisso e as distancias entre os mdulos podem ser aumentadas consideravelmente. Nos testes foi possvel analisar que a interface grfica desenvolvida atende a todas as necessidades bsicas do projeto e isso com uma velocidade de resposta extremamente baixa, tornando o sistema ainda mais confivel, tornando o mesmo capacitado para ser instalado em barragens e realizar o monitoramento da mesma. Para o sistema desenvolvido ainda podem ser realizadas algumas melhorias, como por exemplo, a implementao de grficos na interface grfica, sendo estes grficos divididos por cada sensor.
50
REFERENCIAS BIBLIOGRFICAS
[1] Bosch, R., Manual de tecnologia automotiva. 25.ed. So Paulo: Edgard Blcher, 2005.
[2]
Universidade
Estadual
do
Oeste
do
Paran.
Disponvel
em
http://www.foz.unioeste.br/. Acesso em 30 de junho de 2011.
[3] SANTOS, L. Sistema de Comunicao USB com microcontrolador. Monografia de Graduao Curso de Engenharia da Computao, Escola Politcnica de Pernambuco - Universidade de Pernambuco, Pernambuco, 2009.
[4] Wolfram, T. Bridging two CAN-bus segments using radio communication with the IEEE 802.15.4 protocol. Tese de Mestrado Engenharia Eltrica,
Ingenjrshgskolan, Hgskolan, Jnkping, 2009.
[5] USB Device Classes. Disponvel em http://vusb.wikidot.com/usb-deviceclasses. Acesso em 15 de maro de 2011.
[6] USB CDC. Disponvel em http://www.usb-software.org/usb_cdc.php. Acesso em 20 de maro de 2011.
[7] Ibrahim, D. Advanced PIC microcontroller projects in C: from USB to RTOS with the PIC18F series. Elsevier Ltd, Newnes, 2008.
[8]
Datasheet
do
controlador
CAN
MCP2510.
Disponvel
em
http://ww1.microchip.com/downloads/en/DeviceDoc/21291F.pdf. Acesso em 17 de abril de 2011.
[9]
Datasheet
do
transceiver
CAN
MCP2551.
Disponvel
em
http://ww1.microchip.com/downloads/en/DeviceDoc/21667f.pdf. Acesso em 14 de abril de 2011.
51
[10] BRITO, A. V.; OLIVEIRA, G. S.; CAETANO, L. J. Uma Analise da Implementao ZigBee pela Tecnologia Sun SPOT. In: XXIX Congresso da Sociedade Brasileira de Computao, 2009. Bento Gonalves. XXIX Congresso da Sociedade Brasileira de Computao. Porto Alegre: Sociedade Brasileira de Computao, v. 1, 2009.
[11] CARVALHO, L. O. M.; CUNHA, P. S. Seminrio de redes de computadores II 802.15.4 e ZigBee. Disponvel em: Acesso
http://www.gta.ufrj.br/~rezende/cursos/eel879/trabalhos/ZigBee/index.html. em: 23 de abril de 2011.
[12] GHELLERE, G. (2009). Desenvolvimento de um sistema de monitoramento de temperatura no enrolamento de campo das unidades geradoras de Itaipu. Relatrio de Estagio (Graduao) Curso de Engenharia Eltrica, Universidade Estadual do Oeste do Paran UNIOESTE, Foz do Iguau, 2009.
[13] AGGELOU, G. Wireless Mesh Networking: With 802.16, 802.11, and ZigBee. 1 ed. McGraw-Hill Professional, 2008.
[14] MIZRAHI, V. Treinamento em Linguagem C: mdulos 1 e 2. Porto Alegre: Editora McGraw-Hill, 1990.
[15] Deitel, H. e Deitel, P. Java como Programar. 4 ed. Porto Alegre: Bookman, 2003.
[16] Welcome to Netbeans. Disponvel em http://www.netbeans.org. Acesso em 10 de maio de 2011.
[17] Eclipse. Disponvel em http://www.eclipse.org. Acesso em 15 de maio de 2011.
[18] What is MySQL?. Disponvel em http://www.bluemoosetech.com/php-andmysql.php?jid=9&title=What%20is%20MySQL?. Acesso em 23 de maio de 2011.
52
[19] Taub, H. Circuitos Digitais e Microprocessadores. So Paulo: McGraw-Hill, 1984.
[20] Sedra, A. e Smith, K. Microeletrnica. 5 ed. So Paulo: Pearson Prentice Hall, 2007
[21] Microchip Technology. Disponvel em http://www.microchip.com. Acesso em 10 de junho de 2011.
[22] Datasheet do microcontrolador PIC18F2550 e PIC18F4550. Disponvel em http://ww1.microchip.com/downloads/en/DeviceDoc/39632D.pdf. Acesso em 20 de junho de 2011.
[23]
Datasheet
do
microcontrolador
PIC18F2580
disponvel
em
http://ww1.microchip.com/downloads/en/DeviceDoc/39637c.pdf. Acesso em 25 de junho de 2011.
53
ANEXO A DATASHEET DO MICROCONTROLADOR PIC18F2550/4550
54
55
ANEXO B DATASHEET DO MICROCONTROLADOR PIC18F2580
56
57
ANEXO C DATASHEET DO TRANSCEIVER CAN MCP2551
58
ANEXO D DATASHEET DO CONTROLADOR CAN MCP2510
59
ANEXO E DATASHEET XBEE SERIES 2
60
S-ar putea să vă placă și
- Aumento PenianoDocument17 paginiAumento PenianoUmphallus100% (5)
- A Epistemologia Do Professor - BECKERDocument172 paginiA Epistemologia Do Professor - BECKERCarolOenning100% (1)
- FGV 2021 Imbel Cargos de Nivel Medio ProvaDocument9 paginiFGV 2021 Imbel Cargos de Nivel Medio ProvaAnderson GarciaÎncă nu există evaluări
- As2 Unidade 4 Historia Da ArteDocument2 paginiAs2 Unidade 4 Historia Da ArteArquiteto e Eng. TSST Bombeiro civil Rafael Santos100% (1)
- ANFISDocument52 paginiANFISElvis AlbarelloÎncă nu există evaluări
- Embreagens e Volantes 10Document20 paginiEmbreagens e Volantes 10Daniel Willemam TrindadeÎncă nu există evaluări
- Livro Ichnology of Latin America - Web-Libre PDFDocument198 paginiLivro Ichnology of Latin America - Web-Libre PDFIsabel OcañaÎncă nu există evaluări
- DataSheet - Sun 5K 8K 1224Document2 paginiDataSheet - Sun 5K 8K 1224Hedlund ErikÎncă nu există evaluări
- 2502 Barracao PH PB 01 R00Document1 pagină2502 Barracao PH PB 01 R00Elvis AlbarelloÎncă nu există evaluări
- 2502 Barracao Ele Pe 02 R00Document1 pagină2502 Barracao Ele Pe 02 R00Elvis AlbarelloÎncă nu există evaluări
- 2502 Barracao Ele Pe 03 R01Document1 pagină2502 Barracao Ele Pe 03 R01Elvis AlbarelloÎncă nu există evaluări
- Datasheet SUN 7.5K G 2Document1 paginăDatasheet SUN 7.5K G 2Carlos KaduÎncă nu există evaluări
- Datasheet SUN 7.5K G 2Document1 paginăDatasheet SUN 7.5K G 2Carlos KaduÎncă nu există evaluări
- 2502 Barracao Ele Pe 03 R00Document1 pagină2502 Barracao Ele Pe 03 R00Elvis AlbarelloÎncă nu există evaluări
- 2502 Barracao Ele Pe 02 R01Document1 pagină2502 Barracao Ele Pe 02 R01Elvis AlbarelloÎncă nu există evaluări
- 2435 Ab Silos Santahelena Pe Pda 02 R00Document1 pagină2435 Ab Silos Santahelena Pe Pda 02 R00Elvis AlbarelloÎncă nu există evaluări
- Tabela Clube de ProfissoesDocument11 paginiTabela Clube de ProfissoesElvis AlbarelloÎncă nu există evaluări
- 2502 Barracao Ele Pe 01 R00Document1 pagină2502 Barracao Ele Pe 01 R00Elvis AlbarelloÎncă nu există evaluări
- 2435 Ab Silos Santahelena Pe Pda 01 R00Document1 pagină2435 Ab Silos Santahelena Pe Pda 01 R00Elvis AlbarelloÎncă nu există evaluări
- 2502 Barracao Ele Pe 01 R00Document1 pagină2502 Barracao Ele Pe 01 R00Elvis AlbarelloÎncă nu există evaluări
- Apresentação Comuta ElétricaDocument5 paginiApresentação Comuta ElétricaElvis AlbarelloÎncă nu există evaluări
- Redes PDH&SDHDocument49 paginiRedes PDH&SDHOtavio Filho FilhoÎncă nu există evaluări
- Apresentação Comuta EngenhariaDocument6 paginiApresentação Comuta EngenhariaElvis AlbarelloÎncă nu există evaluări
- Ficha Cadastral Pessoa JurídicDocument4 paginiFicha Cadastral Pessoa JurídicElvis AlbarelloÎncă nu există evaluări
- Atestando Que Recebeu o ServiçoDocument1 paginăAtestando Que Recebeu o ServiçoElvis AlbarelloÎncă nu există evaluări
- Painel de LedDocument82 paginiPainel de LedHamilton MarquesÎncă nu există evaluări
- Laudo PerfectaDocument1 paginăLaudo PerfectaElvis AlbarelloÎncă nu există evaluări
- Bruno Raposo TeseDocument98 paginiBruno Raposo TeseElvis AlbarelloÎncă nu există evaluări
- Solicitação de Acesso - MinigeraçãoDocument1 paginăSolicitação de Acesso - MinigeraçãoElvis AlbarelloÎncă nu există evaluări
- Aula 5 Sistemas de ComuniDocument29 paginiAula 5 Sistemas de ComuniElvis AlbarelloÎncă nu există evaluări
- AE28ELDocument3 paginiAE28ELElvis AlbarelloÎncă nu există evaluări
- Aula 5 Sistemas de ComuniDocument29 paginiAula 5 Sistemas de ComuniElvis AlbarelloÎncă nu există evaluări
- 03 Feedforward e Backpropagation1Document18 pagini03 Feedforward e Backpropagation1Elvis AlbarelloÎncă nu există evaluări
- 411-Carlos Alberto TeixeiraDocument13 pagini411-Carlos Alberto TeixeiraElvis AlbarelloÎncă nu există evaluări
- Projeto1Document1 paginăProjeto1Elvis AlbarelloÎncă nu există evaluări
- SLIDE 4 Aula Unidade 4 - Processamento de Produtos para SaúdeDocument23 paginiSLIDE 4 Aula Unidade 4 - Processamento de Produtos para SaúdeGlaucinea CoutinhoÎncă nu există evaluări
- Aula 08 - Processo Civil IIIDocument21 paginiAula 08 - Processo Civil IIIJennifer NunesÎncă nu există evaluări
- Tornar-Se Diarista: A Percepção Das Empregadas Domésticas Sobre Seu Trabalho em Regime de DiáriasDocument116 paginiTornar-Se Diarista: A Percepção Das Empregadas Domésticas Sobre Seu Trabalho em Regime de DiáriasCecy Bezerra de MeloÎncă nu există evaluări
- Região Centro OesteDocument3 paginiRegião Centro OesteValdecyr SantosÎncă nu există evaluări
- Uma Conversa Sobre A BíbliaDocument17 paginiUma Conversa Sobre A BíbliaGustavo MoreiraÎncă nu există evaluări
- 10 Dicas para Reduzir Os Riscos para o Trabalhador Da Construção Civil - DDS OnlineDocument2 pagini10 Dicas para Reduzir Os Riscos para o Trabalhador Da Construção Civil - DDS OnlineAmorim AmorimÎncă nu există evaluări
- Livro Didático É MuletaDocument3 paginiLivro Didático É MuletaantonioÎncă nu există evaluări
- 5 e 6aula - Hierarquia de MemoriaDocument66 pagini5 e 6aula - Hierarquia de MemoriaRANT2Încă nu există evaluări
- Refugiados D O BrasilDocument11 paginiRefugiados D O BrasilcryhoneyÎncă nu există evaluări
- Edital Convocacao 003 2023Document11 paginiEdital Convocacao 003 2023Priscilla PaixaoÎncă nu există evaluări
- Animais Ed InfDocument8 paginiAnimais Ed InfCentro EducaçãoÎncă nu există evaluări
- Curso 109906 Aula 04 v1Document85 paginiCurso 109906 Aula 04 v1Iury NeivaÎncă nu există evaluări
- Abrindo Caixa de PandoraDocument2 paginiAbrindo Caixa de PandoraTayrine SantosÎncă nu există evaluări
- Diário de Um Ladrão de Oxigênio by AnônimoDocument113 paginiDiário de Um Ladrão de Oxigênio by AnônimojaquelinearodriguesÎncă nu există evaluări
- 3.2. Aspiral HermenêuticaDocument22 pagini3.2. Aspiral HermenêuticaMário AlbuquerqueÎncă nu există evaluări
- Relatório de Entrega de Atividades Extensionistas Atual-2Document2 paginiRelatório de Entrega de Atividades Extensionistas Atual-2Ana AzevedoÎncă nu există evaluări
- Prof. Tacia - Lição 10 REVISÃO AV1 - Logística 22 A 26.5Document53 paginiProf. Tacia - Lição 10 REVISÃO AV1 - Logística 22 A 26.5Fernanda VitaliÎncă nu există evaluări
- Gerald Holton. As Raízes Da Complementaridade PDFDocument23 paginiGerald Holton. As Raízes Da Complementaridade PDFUmaitan JuniorÎncă nu există evaluări
- NBR 6405 - Maquinas Rodoviarias - Simbolos para Controles Do Operador e Outros Mostradores - PartDocument28 paginiNBR 6405 - Maquinas Rodoviarias - Simbolos para Controles Do Operador e Outros Mostradores - PartSuel VicenteÎncă nu există evaluări
- Atividade 9 - Economia Brasileira Contemporânea - G1 - T1 - 2022 - 2Document2 paginiAtividade 9 - Economia Brasileira Contemporânea - G1 - T1 - 2022 - 2Ana Carolina CastroÎncă nu există evaluări
- AULA 3 - Redação - Como Organizar Meu Pensamento - Profa. PambaDocument8 paginiAULA 3 - Redação - Como Organizar Meu Pensamento - Profa. PambaPaulinha GazarianÎncă nu există evaluări
- MONTEIRO - ET - ALLI - URBI - FAVELAS - Cartografias - Resistencias - 2018Document20 paginiMONTEIRO - ET - ALLI - URBI - FAVELAS - Cartografias - Resistencias - 2018Carla KawanamiÎncă nu există evaluări
- Ebook Homenagem Ao Prof Denilson2 CORRIGIDO CORRETO 2 Thz8d8Document128 paginiEbook Homenagem Ao Prof Denilson2 CORRIGIDO CORRETO 2 Thz8d8adilivsÎncă nu există evaluări
- Lição 10 A Destruição de JerusalémDocument12 paginiLição 10 A Destruição de JerusalémRomário DiasÎncă nu există evaluări