S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Composite Materials 2 Mark 16 Mark With Ans Anna University Paper PDFDocument46 paginiComposite Materials 2 Mark 16 Mark With Ans Anna University Paper PDFmagicoolmech712Încă nu există evaluări
- Organizational Behavior - John MiddletonDocument129 paginiOrganizational Behavior - John MiddletonNisha71% (7)
- JNTU KAKINADA - B.Tech - REFRIGERATION and AIR CONDITIONING R13 RT32037A042017 FR 764 PDFDocument8 paginiJNTU KAKINADA - B.Tech - REFRIGERATION and AIR CONDITIONING R13 RT32037A042017 FR 764 PDFmagicoolmech712100% (1)
- Academic Vacancy Position PDFDocument155 paginiAcademic Vacancy Position PDFmagicoolmech712Încă nu există evaluări
- JNTUK - M Tech - 2018 - 1st Semester - Feb - R17 R16 R15 R13 - I2103022018 ADVANCED HEAT AND MASS TRANSFER PDFDocument2 paginiJNTUK - M Tech - 2018 - 1st Semester - Feb - R17 R16 R15 R13 - I2103022018 ADVANCED HEAT AND MASS TRANSFER PDFmagicoolmech712Încă nu există evaluări
- Comparison of Mechanical Properties of Al O and Low Density Polyethylene (LDPE)Document4 paginiComparison of Mechanical Properties of Al O and Low Density Polyethylene (LDPE)magicoolmech712Încă nu există evaluări
- 84 Picon NunezDocument6 pagini84 Picon Nunez1940LaSalleÎncă nu există evaluări
- Artificial Intelligence Knowledge Representation Lecture 05Document22 paginiArtificial Intelligence Knowledge Representation Lecture 05Shut UpÎncă nu există evaluări
- Final Draft Final Research ProposalDocument28 paginiFinal Draft Final Research Proposalapi-432035312Încă nu există evaluări
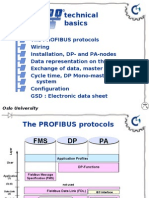
- Technical Basics: Oslo University CollegeDocument19 paginiTechnical Basics: Oslo University Collegesurendratv2007Încă nu există evaluări
- Composition and Resolution of Forces and Condition of Equilibrium of ForcesDocument13 paginiComposition and Resolution of Forces and Condition of Equilibrium of Forcesdevli falduÎncă nu există evaluări
- PHYsicsDocument10 paginiPHYsicsonly1fxisguruÎncă nu există evaluări
- Math Solution ManualDocument46 paginiMath Solution ManualEdzae LilioÎncă nu există evaluări
- Western Mathematics, A Weapon-Bishop A J (Article2)Document16 paginiWestern Mathematics, A Weapon-Bishop A J (Article2)Karigar Medha100% (1)
- Assignments 1 SolutionDocument6 paginiAssignments 1 SolutionAtif Ali100% (1)
- Algorithms - Chapter 1 IntroDocument23 paginiAlgorithms - Chapter 1 IntroSx69Încă nu există evaluări
- Causes and Cures of Regulator InstabilityDocument5 paginiCauses and Cures of Regulator Instabilityratninp9368100% (1)
- MATH3161 Lecture 1Document7 paginiMATH3161 Lecture 1BobÎncă nu există evaluări
- Class X English Maths Chapter17Document16 paginiClass X English Maths Chapter17Deena SÎncă nu există evaluări
- Engineering Mathematics IIDocument102 paginiEngineering Mathematics IIIsaac P PlanÎncă nu există evaluări
- Statistics For Business and Economics 13th Edition Anderson Solutions ManualDocument23 paginiStatistics For Business and Economics 13th Edition Anderson Solutions Manualalberttuyetrcpk100% (23)
- Electric Field and Potential Lab ReportDocument6 paginiElectric Field and Potential Lab ReportAudio books LibraryÎncă nu există evaluări
- Network Topology YashuDocument7 paginiNetwork Topology YashuyashuÎncă nu există evaluări
- Matlab by Rajesh Bandari YadavDocument55 paginiMatlab by Rajesh Bandari Yadavhyma kadakatla100% (2)
- Curve and SurfacesDocument28 paginiCurve and SurfacesAnonymous u87aqFoÎncă nu există evaluări
- Estimation of Measurement Uncertainty in Food Microbiology: The ISO ApproachDocument8 paginiEstimation of Measurement Uncertainty in Food Microbiology: The ISO ApproachJaci DorregarayÎncă nu există evaluări
- Portfolio Optimization in Electricity Markets: Min Liu, Felix F. WuDocument10 paginiPortfolio Optimization in Electricity Markets: Min Liu, Felix F. Wujorge jorgeÎncă nu există evaluări
- Laplace TransformationDocument2 paginiLaplace TransformationSeanne CruzÎncă nu există evaluări
- ExercisesDocument8 paginiExercisesKayalvizhi Selvam0% (1)
- F F R V 0 (2.1) : A) Ideal CSTRDocument12 paginiF F R V 0 (2.1) : A) Ideal CSTRCamiloZapataÎncă nu există evaluări
- A Technique For Factorising Trinomials With Non-Unitary X 2 CoefficientDocument2 paginiA Technique For Factorising Trinomials With Non-Unitary X 2 CoefficientMichael MorganÎncă nu există evaluări
- 873p In003 - en PDocument4 pagini873p In003 - en PdanielcelÎncă nu există evaluări
- Course Outline: Course Title: Linear Algebra Course Code: EDME3201 (ME32A) Level: 3 Semester: 3 Credits: 3Document3 paginiCourse Outline: Course Title: Linear Algebra Course Code: EDME3201 (ME32A) Level: 3 Semester: 3 Credits: 3Perry SinÎncă nu există evaluări
- Mid Exam 2003Document17 paginiMid Exam 2003DavidÎncă nu există evaluări
- SME3013 History of Mathematical Sciences: SEMESTER 1 SESSION 2019/2020Document2 paginiSME3013 History of Mathematical Sciences: SEMESTER 1 SESSION 2019/2020Nur Hana SyamsulÎncă nu există evaluări
- Business Mathematics For ScribdDocument2 paginiBusiness Mathematics For Scribdfire2drinkÎncă nu există evaluări