S-ar putea să vă placă și
- BNM Dental PanelDocument13 paginiBNM Dental PanelfisriiÎncă nu există evaluări
- 802 11Document253 pagini802 11Abraham NdongÎncă nu există evaluări
- Boano Thesis SummaryDocument2 paginiBoano Thesis SummaryfisriiÎncă nu există evaluări
- IIR Filter DesignDocument18 paginiIIR Filter DesignfisriiÎncă nu există evaluări
- Teaching ScheduleDocument1 paginăTeaching SchedulefisriiÎncă nu există evaluări
- IIR Filter DesignDocument18 paginiIIR Filter DesignfisriiÎncă nu există evaluări
- Digital FiltersDocument26 paginiDigital FiltersfisriiÎncă nu există evaluări
- Mitigating The Effect of Interference in Wireless Sensor NetworksDocument8 paginiMitigating The Effect of Interference in Wireless Sensor NetworksfisriiÎncă nu există evaluări
- A New WSN Paradigm For Environmental Monitoring and Data CollectionDocument6 paginiA New WSN Paradigm For Environmental Monitoring and Data CollectionfisriiÎncă nu există evaluări
- Current ResumeDocument3 paginiCurrent ResumefisriiÎncă nu există evaluări
- DSP Hardware: EKT353 Lecture Notes by Professor Dr. Farid GhaniDocument44 paginiDSP Hardware: EKT353 Lecture Notes by Professor Dr. Farid GhanifisriiÎncă nu există evaluări
- Submission Paul Gorday, Motorola Slide 1Document11 paginiSubmission Paul Gorday, Motorola Slide 1fisriiÎncă nu există evaluări
- A New WSN Paradigm For Environmental Monitoring and Data CollectionDocument6 paginiA New WSN Paradigm For Environmental Monitoring and Data CollectionfisriiÎncă nu există evaluări
- 00 InstallationDocument25 pagini00 InstallationfisriiÎncă nu există evaluări
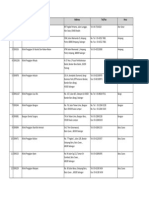
- Registered Structural Engineers ListDocument5 paginiRegistered Structural Engineers ListHalar MaymonÎncă nu există evaluări
- Chapter 3 LightSourcesDocument15 paginiChapter 3 LightSourcesfisriiÎncă nu există evaluări
- Chapter 5 Euw322 Steven CoveyDocument23 paginiChapter 5 Euw322 Steven CoveyfisriiÎncă nu există evaluări
- WSN Cds MnkarDocument6 paginiWSN Cds MnkarfisriiÎncă nu există evaluări
- Cryptomeria c2 SpecDocument9 paginiCryptomeria c2 SpecfisriiÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Refractomax 521 Refractive Index Detector: FeaturesDocument2 paginiRefractomax 521 Refractive Index Detector: FeaturestamiaÎncă nu există evaluări
- Reinforced and Filled Poly (Phenylene Sulfide) (PPS) Injection Molding and Extrusion Materials Using ASTM MethodsDocument6 paginiReinforced and Filled Poly (Phenylene Sulfide) (PPS) Injection Molding and Extrusion Materials Using ASTM MethodsJosé Miguel Palomino GarciaÎncă nu există evaluări
- Edgevpldt Legazpi - Ee As-Built 121922Document10 paginiEdgevpldt Legazpi - Ee As-Built 121922Debussy PanganibanÎncă nu există evaluări
- Six Thinking Hats TrainingDocument34 paginiSix Thinking Hats TrainingNishanthan100% (1)
- Mid Semester ExaminationDocument2 paginiMid Semester ExaminationMOHAMMED RIHANÎncă nu există evaluări
- Pumping Station Modification PDFDocument15 paginiPumping Station Modification PDFcarlosnavalmaster100% (1)
- About Kia Motors Corporation: All-NewDocument19 paginiAbout Kia Motors Corporation: All-NewWessam FathiÎncă nu există evaluări
- What Is Propaganda DeviceDocument3 paginiWhat Is Propaganda DeviceGino R. Monteloyola100% (1)
- Understanding Nominal Pipe Sizes (NPS) and Pipe DimensionsDocument39 paginiUnderstanding Nominal Pipe Sizes (NPS) and Pipe DimensionsprathikÎncă nu există evaluări
- Tally QuestionsDocument73 paginiTally QuestionsVishal Shah100% (1)
- Alvarez vs. COMELECDocument5 paginiAlvarez vs. COMELECvanessa3333333Încă nu există evaluări
- Research On Ignorance of The Law Excuses No One From ComplianceDocument12 paginiResearch On Ignorance of The Law Excuses No One From ComplianceAnonymous iOYkz0wÎncă nu există evaluări
- E.R. Hooton, Tom Cooper - Desert Storm - Volume 2 - Operation Desert Storm and The Coalition Liberation of Kuwait 1991 (Middle East@War) (2021, Helion and CompanyDocument82 paginiE.R. Hooton, Tom Cooper - Desert Storm - Volume 2 - Operation Desert Storm and The Coalition Liberation of Kuwait 1991 (Middle East@War) (2021, Helion and Companydubie dubs100% (5)
- Norlys 2016Document124 paginiNorlys 2016elektrospecÎncă nu există evaluări
- Electricity BillDocument1 paginăElectricity BillSushila SinghÎncă nu există evaluări
- 2017 Advanced Computer Networks Homework 1Document6 pagini2017 Advanced Computer Networks Homework 1Fadhli RahimÎncă nu există evaluări
- Iglesia Ni Cristo v. Court of AppealsDocument2 paginiIglesia Ni Cristo v. Court of AppealsNoreen NombsÎncă nu există evaluări
- Solar Winds OrionAPM DatasheetDocument4 paginiSolar Winds OrionAPM DatasheetArun J D'SouzaÎncă nu există evaluări
- Unit 3: The Catering Service Industry Topic: Catering Service Concept Digest (Discussion)Document5 paginiUnit 3: The Catering Service Industry Topic: Catering Service Concept Digest (Discussion)Justin MagnanaoÎncă nu există evaluări
- DESIGN AND FABRICATION TURBO WOOD STOVE TIET OriginalDocument71 paginiDESIGN AND FABRICATION TURBO WOOD STOVE TIET OriginalSHIELDÎncă nu există evaluări
- Igt - Boot Os List Rev B 10-28-2015Document5 paginiIgt - Boot Os List Rev B 10-28-2015Hector VillarrealÎncă nu există evaluări
- Speaking Telephone RoleplaysDocument2 paginiSpeaking Telephone RoleplaysremimiguelÎncă nu există evaluări
- ADVOCACY AND LOBBYING NDocument7 paginiADVOCACY AND LOBBYING NMwanza MaliiÎncă nu există evaluări
- Project Proposal: Retail Environment Design To Create Brand ExperienceDocument3 paginiProject Proposal: Retail Environment Design To Create Brand ExperienceMithin R KumarÎncă nu există evaluări
- Daa M-4Document28 paginiDaa M-4Vairavel ChenniyappanÎncă nu există evaluări
- NYU Stern Evaluation NewsletterDocument25 paginiNYU Stern Evaluation NewsletterCanadianValueÎncă nu există evaluări
- Unit 8 Risk in The WorkplaceDocument11 paginiUnit 8 Risk in The WorkplaceAnonymous WalvB8Încă nu există evaluări
- A Study of Arcing Fault in The Low-Voltage Electrical InstallationDocument11 paginiA Study of Arcing Fault in The Low-Voltage Electrical Installationaddin100% (1)
- Company BackgroundDocument17 paginiCompany Backgroundzayna faizaÎncă nu există evaluări
- EzraCohen TVMasterclass 2.0Document10 paginiEzraCohen TVMasterclass 2.0Pete PetittiÎncă nu există evaluări