S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- IOCL1Document48 paginiIOCL1Prittam Kumar JenaÎncă nu există evaluări
- CommDocument46 paginiCommPrittam Kumar JenaÎncă nu există evaluări
- ConclusionDocument1 paginăConclusionPrittam Kumar JenaÎncă nu există evaluări
- Octamec Space Frames StructuresDocument2 paginiOctamec Space Frames StructuresPrittam Kumar JenaÎncă nu există evaluări
- Fly Over at Rajmahal SquareDocument68 paginiFly Over at Rajmahal SquarePrittam Kumar JenaÎncă nu există evaluări
- Octamec Space Frames StructuresDocument2 paginiOctamec Space Frames StructuresPrittam Kumar JenaÎncă nu există evaluări
- Shunt Capacitor Bank Fundamentals and Protection (PresentatioDocument29 paginiShunt Capacitor Bank Fundamentals and Protection (PresentatioPrittam Kumar Jena100% (2)
- Àÿç'Ÿæáÿœÿæ Ó Æ'Ÿlÿ Àÿófê Ÿ Ÿçé Æáÿ Ó Æ'Ÿlÿ Ÿç Ÿ Æ Ÿœÿ Þüÿæ Æ Ÿ÷ ÷óæàÿ ÷'ÿê© Lëÿþæàÿ (Àÿzÿæ Ÿçjæ Œÿ Óë Ÿ÷ Ÿ 'Ÿæó ÷Bÿ'Ÿ Äê (Àÿæ'ŸDocument48 paginiÀÿç'Ÿæáÿœÿæ Ó Æ'Ÿlÿ Àÿófê Ÿ Ÿçé Æáÿ Ó Æ'Ÿlÿ Ÿç Ÿ Æ Ÿœÿ Þüÿæ Æ Ÿ÷ ÷óæàÿ ÷'ÿê© Lëÿþæàÿ (Àÿzÿæ Ÿçjæ Œÿ Óë Ÿ÷ Ÿ 'Ÿæó ÷Bÿ'Ÿ Äê (Àÿæ'ŸPrittam Kumar JenaÎncă nu există evaluări
- AMC Agreement 167Document6 paginiAMC Agreement 167Prittam Kumar JenaÎncă nu există evaluări
- Quantitative Method CP 102Document5 paginiQuantitative Method CP 102Prittam Kumar JenaÎncă nu există evaluări
- India Business Last Previous Highest Lowest UnitDocument4 paginiIndia Business Last Previous Highest Lowest UnitPrittam Kumar JenaÎncă nu există evaluări
- Reinforcing SteelDocument8 paginiReinforcing SteelPrittam Kumar JenaÎncă nu există evaluări
- Photocopier Machines Sample ContractDocument11 paginiPhotocopier Machines Sample ContractHarold Uchi Dolores100% (1)
- Solar Water PumpingDocument11 paginiSolar Water PumpingPrittam Kumar JenaÎncă nu există evaluări
- WebbrmanualDocument184 paginiWebbrmanualRam NepaliÎncă nu există evaluări
- Brushless DC Motor Control Using GSMDocument3 paginiBrushless DC Motor Control Using GSMPrittam Kumar JenaÎncă nu există evaluări
- Water Vapour Cooling TowerDocument1 paginăWater Vapour Cooling TowerPrittam Kumar JenaÎncă nu există evaluări
- Hovercraft DetailDocument2 paginiHovercraft DetailPrittam Kumar JenaÎncă nu există evaluări
- Over Load ProtectionDocument49 paginiOver Load ProtectionPrittam Kumar Jena100% (1)
- Pure Sine Wave InvertorDocument2 paginiPure Sine Wave InvertorPrittam Kumar JenaÎncă nu există evaluări
- STPLDocument1 paginăSTPLPrittam Kumar JenaÎncă nu există evaluări
- An Obstacle Detection System For Blind PeopleDocument1 paginăAn Obstacle Detection System For Blind PeoplePrittam Kumar JenaÎncă nu există evaluări
- Tharmal 2Document48 paginiTharmal 2Prittam Kumar JenaÎncă nu există evaluări
- PP On Fly AshDocument7 paginiPP On Fly AshshariquesayeedÎncă nu există evaluări
- An Obstacle Detection System For Blind PeopleDocument1 paginăAn Obstacle Detection System For Blind PeoplePrittam Kumar JenaÎncă nu există evaluări
- Touch Screen Technology: EECS 373 Jake Chrumka and David YuschakDocument24 paginiTouch Screen Technology: EECS 373 Jake Chrumka and David YuschakMayank AgarwalÎncă nu există evaluări
- Conveyer Belt With 2-Link Robotic ArmDocument2 paginiConveyer Belt With 2-Link Robotic ArmPrittam Kumar JenaÎncă nu există evaluări
- DC Motor Control Without MCDocument20 paginiDC Motor Control Without MCPrittam Kumar JenaÎncă nu există evaluări
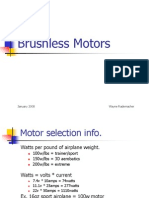
- Brushless Motors: January 2008 Wayne RademacherDocument27 paginiBrushless Motors: January 2008 Wayne RademacherPrittam Kumar JenaÎncă nu există evaluări
- Heat Exchanger 3Document20 paginiHeat Exchanger 3spruhatech2013Încă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Mixed Grabar b2Document1 paginăMixed Grabar b2lynÎncă nu există evaluări
- UNIT - 1 (Data Structure Using C/C++) .: Definition of AlgorithmDocument2 paginiUNIT - 1 (Data Structure Using C/C++) .: Definition of AlgorithmArjun BhargavaÎncă nu există evaluări
- Notificatio N (Rese Rvation) Gove Rnment: A Cu) UTDocument1 paginăNotificatio N (Rese Rvation) Gove Rnment: A Cu) UT122-Ayush Kumar ParganihaÎncă nu există evaluări
- 1 Introduction To Thermal System DesignDocument43 pagini1 Introduction To Thermal System DesignAbhishek KullurÎncă nu există evaluări
- Item 103 Structure ExcavationDocument3 paginiItem 103 Structure ExcavationGerry Velicaria100% (1)
- Toyota 80 SeriesDocument5 paginiToyota 80 Seriesaagi_dÎncă nu există evaluări
- Listprice 07 11Document1.797 paginiListprice 07 11Tejano RockÎncă nu există evaluări
- HRTEMDocument5 paginiHRTEMRajathi YadavÎncă nu există evaluări
- Free Pergola PlansDocument14 paginiFree Pergola Planstonyrod RodriguezÎncă nu există evaluări
- Flapper Diverter Valve BrochureDocument4 paginiFlapper Diverter Valve BrochureRicardo Ramírez ZapataÎncă nu există evaluări
- FTNV-B FINAL - CatalogueDocument8 paginiFTNV-B FINAL - CatalogueAmodu Usman AdeyinkaÎncă nu există evaluări
- Catalogo. Aparatos de Maniobra y Proteccion - Sirius. Siemens PDFDocument52 paginiCatalogo. Aparatos de Maniobra y Proteccion - Sirius. Siemens PDFPedro MalpicaÎncă nu există evaluări
- Calculating The Maximum Attenuation For Optical Fiber LinksDocument5 paginiCalculating The Maximum Attenuation For Optical Fiber LinksMiguel LiceagaÎncă nu există evaluări
- Project Example 1Document10 paginiProject Example 1dervingameÎncă nu există evaluări
- Table StructureDocument180 paginiTable StructureVictor PathakÎncă nu există evaluări
- Realistic Equations of StateDocument94 paginiRealistic Equations of Stateaman09752Încă nu există evaluări
- A Primer On Spray Drying Chemical Engineering Nov09Document7 paginiA Primer On Spray Drying Chemical Engineering Nov09Hikmah Triana HadiÎncă nu există evaluări
- Course Catalog 2019Document34 paginiCourse Catalog 2019Mehaboob BashaÎncă nu există evaluări
- Saes T 629Document10 paginiSaes T 629Azhar Saqlain.Încă nu există evaluări
- High Efficiency Multijunction Solar Cells For Large Scale Solar Electricity Generation KurtzDocument29 paginiHigh Efficiency Multijunction Solar Cells For Large Scale Solar Electricity Generation Kurtzn1261984Încă nu există evaluări
- 3.re Situation in Suez Canal - M.V EVER GIVEN SUCCESSFULLY REFLOATEDDocument9 pagini3.re Situation in Suez Canal - M.V EVER GIVEN SUCCESSFULLY REFLOATEDaungyinmoeÎncă nu există evaluări
- FRA5310 TechDocument2 paginiFRA5310 TechBash MatÎncă nu există evaluări
- As BuiltDocument12 paginiAs BuiltAnurag PandeyÎncă nu există evaluări
- Iec TS 62257-7-1-2006Document86 paginiIec TS 62257-7-1-2006Yassine BecharÎncă nu există evaluări
- Spare Parts List: Riders R214 TC, 967325902, 2017-01Document49 paginiSpare Parts List: Riders R214 TC, 967325902, 2017-01aliuta aliutaÎncă nu există evaluări
- Trouble Shooting Dewatering PumpDocument136 paginiTrouble Shooting Dewatering PumpMuhammad NoorÎncă nu există evaluări
- Conveyor Belt: Heavy Duty RubberDocument5 paginiConveyor Belt: Heavy Duty RubberHeidrahÎncă nu există evaluări
- SZ 150.1 MergedDocument116 paginiSZ 150.1 MergedArif MamunÎncă nu există evaluări
- New V70 XC70 Owners Manual MY05 en Tp7551Document226 paginiNew V70 XC70 Owners Manual MY05 en Tp7551dynax4Încă nu există evaluări
- Greenshine New Energy Saves Fortuna's Beautification Efforts While Providing A Robust New Lighting SolutionDocument2 paginiGreenshine New Energy Saves Fortuna's Beautification Efforts While Providing A Robust New Lighting SolutionPR.comÎncă nu există evaluări