S-ar putea să vă placă și
- Distance Protection Algorithm For Double-Circuit Transmission Line With Fault Resistance CompensationDocument7 paginiDistance Protection Algorithm For Double-Circuit Transmission Line With Fault Resistance Compensationab_7178Încă nu există evaluări
- 1MRG013498 en ATP-EMTP Study of Current Differential Protection With Synchronization and Fault Location Functions PDFDocument6 pagini1MRG013498 en ATP-EMTP Study of Current Differential Protection With Synchronization and Fault Location Functions PDFlisusedÎncă nu există evaluări
- Post Fault AnalysisDocument7 paginiPost Fault AnalysisparmvirbhullarÎncă nu există evaluări
- Er Ieee BPT TESISDocument6 paginiEr Ieee BPT TESISVladimirCoelloÎncă nu există evaluări
- Distance Protection of Double-Circuit Transmission Lines With Compensation For The Reactance Effect Under Standard Availability of MeasurementsDocument5 paginiDistance Protection of Double-Circuit Transmission Lines With Compensation For The Reactance Effect Under Standard Availability of Measurementstandin tshewangÎncă nu există evaluări
- Localizador de Falla GEDocument3 paginiLocalizador de Falla GEYozuCataldoFernandezÎncă nu există evaluări
- Design Phase and Amplitude Comparators For Transmission Line ProtectionDocument6 paginiDesign Phase and Amplitude Comparators For Transmission Line ProtectionKaran Bir SinghÎncă nu există evaluări
- Impedance-Based Fault Location For Overhead and Underground Distribution SystemsDocument6 paginiImpedance-Based Fault Location For Overhead and Underground Distribution SystemsRi TinÎncă nu există evaluări
- Electrical Power and Energy Systems: Ricardo Caneloi Dos Santos, Eduardo Cesar SengerDocument10 paginiElectrical Power and Energy Systems: Ricardo Caneloi Dos Santos, Eduardo Cesar SengerAli AsaadÎncă nu există evaluări
- ATP-EMTP Investigation of Adaptive DistanceDocument6 paginiATP-EMTP Investigation of Adaptive Distancemarg1972Încă nu există evaluări
- PAPER 2001 03 en Fault Location Method For MV Cable Network PDFDocument4 paginiPAPER 2001 03 en Fault Location Method For MV Cable Network PDFapofviewÎncă nu există evaluări
- Er Bled 98Document5 paginiEr Bled 98vuphanhuanÎncă nu există evaluări
- Protection ProjectDocument31 paginiProtection ProjectdineshbaradiÎncă nu există evaluări
- T1035 PDFDocument8 paginiT1035 PDFCarlos Lino Rojas AgüeroÎncă nu există evaluări
- Georgia Institute of Technology ECE 6331-A-Assignment #1Document2 paginiGeorgia Institute of Technology ECE 6331-A-Assignment #1Gaurav PaiÎncă nu există evaluări
- Analog Multiplier Using Operational AmplifiersDocument4 paginiAnalog Multiplier Using Operational AmplifiersxongassilvaÎncă nu există evaluări
- Effects of Dynamic Fault Impedance Variation On Accuracy of Fault Location Estimation For Series Compensated Transmission LinesDocument5 paginiEffects of Dynamic Fault Impedance Variation On Accuracy of Fault Location Estimation For Series Compensated Transmission Linesjijo123408Încă nu există evaluări
- FL Principles KTH EH2740 PDFDocument13 paginiFL Principles KTH EH2740 PDFapofviewÎncă nu există evaluări
- Symmetrical ComponentsDocument6 paginiSymmetrical ComponentsezzateisÎncă nu există evaluări
- A New Numerical Algorithm For Fault Location Estimation Using Two-Terminal Synchronized Voltage and Current PhasorsDocument6 paginiA New Numerical Algorithm For Fault Location Estimation Using Two-Terminal Synchronized Voltage and Current PhasorsJason BauerÎncă nu există evaluări
- Fundamental Frequency Equivalenting of Series Capacitors With Movs in A Series-Compensated Line Under Fault ConditionsDocument6 paginiFundamental Frequency Equivalenting of Series Capacitors With Movs in A Series-Compensated Line Under Fault ConditionsJose GigliottiÎncă nu există evaluări
- Zero Sequence Current Compensation For Distance Protection Applied To Series Compensated Parallel LinesDocument9 paginiZero Sequence Current Compensation For Distance Protection Applied To Series Compensated Parallel LinesbhpÎncă nu există evaluări
- Analysis of Tihe Operation of A Distance Relay During An Unbalanced Arc Fault Ani) Verification by Model TestsDocument4 paginiAnalysis of Tihe Operation of A Distance Relay During An Unbalanced Arc Fault Ani) Verification by Model TestsJohari Zhou Hao LiÎncă nu există evaluări
- Three Phase PWM RectDocument13 paginiThree Phase PWM RectMridul MishraÎncă nu există evaluări
- EE2351-Power System Analysis PDFDocument15 paginiEE2351-Power System Analysis PDFRK K0% (1)
- Opamp DesignDocument27 paginiOpamp DesignAbhishek DwivediÎncă nu există evaluări
- PSP TutorialDocument16 paginiPSP TutorialMatthew WongÎncă nu există evaluări
- PSP Tutorial 4-5Document16 paginiPSP Tutorial 4-5flyzalÎncă nu există evaluări
- Imp QpaperDocument3 paginiImp QpaperskmlsuÎncă nu există evaluări
- Module 6: Distance Protection: Introduction To Distance RelayingDocument8 paginiModule 6: Distance Protection: Introduction To Distance Relayingsunny1725Încă nu există evaluări
- Symmetrical ComponentsDocument44 paginiSymmetrical ComponentsJason SonidoÎncă nu există evaluări
- Distribution Automation Handbook: Section 8.15 Impedance-Based Fault LocationDocument24 paginiDistribution Automation Handbook: Section 8.15 Impedance-Based Fault Locationronald_chan_2Încă nu există evaluări
- On-Line Trained Neuro-Fuzzy Distance Relay With Directional ElementDocument6 paginiOn-Line Trained Neuro-Fuzzy Distance Relay With Directional ElementSíñgh JèêtÎncă nu există evaluări
- GM-C All-Pass Filter (Camera Ready Paper) HighlightedDocument5 paginiGM-C All-Pass Filter (Camera Ready Paper) HighlightedDr. D. V. KamathÎncă nu există evaluări
- A Novel Dynamic Voltage Restorer Based On Matrix ConvertersDocument7 paginiA Novel Dynamic Voltage Restorer Based On Matrix ConvertersAbdulwahid Al-safanyÎncă nu există evaluări
- New Chapter 6 Symmetrical ComponentsDocument23 paginiNew Chapter 6 Symmetrical ComponentsOsman AhmedÎncă nu există evaluări
- Unit I - Introduction Part - A (2 Marks)Document14 paginiUnit I - Introduction Part - A (2 Marks)Ragul RamÎncă nu există evaluări
- 7.short Circuit CalculationsDocument14 pagini7.short Circuit Calculationskvramanan_1Încă nu există evaluări
- PEEI - Expt - Electrical EnggDocument13 paginiPEEI - Expt - Electrical EnggnickswapÎncă nu există evaluări
- 14-05 Power System Analysis (EL)Document2 pagini14-05 Power System Analysis (EL)Javed samejoÎncă nu există evaluări
- GATE-2014 Electrical MeasurementsDocument42 paginiGATE-2014 Electrical MeasurementsRamaDinakaran100% (1)
- LOGBOOKDocument29 paginiLOGBOOKAakash SinghÎncă nu există evaluări
- Question Bank Samples For Power System II EE602Document4 paginiQuestion Bank Samples For Power System II EE602AvijitÎncă nu există evaluări
- Power SystemDocument3 paginiPower SystemMogaka LucasÎncă nu există evaluări
- Applications of Balanced ModulatorDocument5 paginiApplications of Balanced ModulatorSomeshwar GaddalaÎncă nu există evaluări
- Power System QuestionaireDocument4 paginiPower System QuestionairejunpamsÎncă nu există evaluări
- Distance Protection Performance Analysis Using Dynamic Modeling MethodDocument5 paginiDistance Protection Performance Analysis Using Dynamic Modeling MethodGinta NoviyantoÎncă nu există evaluări
- Final Exam Past Year QuestionDocument8 paginiFinal Exam Past Year Questionmuhdarshad645Încă nu există evaluări
- A New ISPWM Switching Technique For THD Reduction in Custom Power DevicesDocument7 paginiA New ISPWM Switching Technique For THD Reduction in Custom Power DevicesBharathkumars89Încă nu există evaluări
- Internal and External Op-Amp Compensation - A Control-Centric TutorialDocument15 paginiInternal and External Op-Amp Compensation - A Control-Centric TutorialengsysÎncă nu există evaluări
- Distance ProtectionDocument14 paginiDistance ProtectionBrenda Naranjo MorenoÎncă nu există evaluări
- Simulink Design of Three Phase Fault DetectionDocument8 paginiSimulink Design of Three Phase Fault DetectionNishant NagarÎncă nu există evaluări
- Lab7 EnaDocument10 paginiLab7 EnaLaiba ShahzadÎncă nu există evaluări
- Assignment 2Document2 paginiAssignment 2ni60Încă nu există evaluări
- Modern Control Strategies for Power Active Filter: i · sin (ωt) i · sin (ωt − 120 · sin (ωt + 120Document5 paginiModern Control Strategies for Power Active Filter: i · sin (ωt) i · sin (ωt − 120 · sin (ωt + 120Jose CampbellÎncă nu există evaluări
- I-Principles: Zone-PackagedDocument24 paginiI-Principles: Zone-PackagedJohari Zhou Hao LiÎncă nu există evaluări
- Distance Protection System in RailwayDocument5 paginiDistance Protection System in RailwaypavanÎncă nu există evaluări
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesDe la EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesÎncă nu există evaluări
- Power System Commissioning and Maintenance PracticeDocument35 paginiPower System Commissioning and Maintenance Practiceb33law33% (3)
- Power System Commissioning and Maintenance PracticeDocument35 paginiPower System Commissioning and Maintenance Practiceb33law33% (3)
- An Analog Model Power System For Research and Classroom UseDocument6 paginiAn Analog Model Power System For Research and Classroom Useb33lawÎncă nu există evaluări
- PAC World Magazine - History Protection - Generations of ProtectionDocument7 paginiPAC World Magazine - History Protection - Generations of Protectionb33lawÎncă nu există evaluări
- Power Line Communication: EE 400 Term ProjectDocument8 paginiPower Line Communication: EE 400 Term Projectb33lawÎncă nu există evaluări
- Plcc-Npti, 01.08.09Document35 paginiPlcc-Npti, 01.08.09b33law100% (1)
- Etl Training2Document66 paginiEtl Training2b33law50% (2)
- Department of Electronics and Electrical Engineering EE3 Power SystemsDocument32 paginiDepartment of Electronics and Electrical Engineering EE3 Power Systemsb33lawÎncă nu există evaluări
- Power Line CommunicationDocument10 paginiPower Line Communicationb33lawÎncă nu există evaluări
- Power Line Communication - Wikipedia, The Free Encyclopedia-1Document6 paginiPower Line Communication - Wikipedia, The Free Encyclopedia-1b33lawÎncă nu există evaluări
- Clarke Transform - Open Electrical-1 PDFDocument3 paginiClarke Transform - Open Electrical-1 PDFb33lawÎncă nu există evaluări
- Dq0 Transform - Open Electrical PDFDocument3 paginiDq0 Transform - Open Electrical PDFb33lawÎncă nu există evaluări
- Fault in Power SystemDocument1 paginăFault in Power Systemb33lawÎncă nu există evaluări
- 7SD52 - Multi-End Differential Protection Relay For Two To Six Line Ends, 4-Line Backlit Display - SiemensDocument3 pagini7SD52 - Multi-End Differential Protection Relay For Two To Six Line Ends, 4-Line Backlit Display - Siemensb33lawÎncă nu există evaluări
- Communication System Relay GuideDocument7 paginiCommunication System Relay Guideb33lawÎncă nu există evaluări
- Text Mining Techniques Applications and Issues2Document5 paginiText Mining Techniques Applications and Issues2LuigiCastroAlvisÎncă nu există evaluări
- 5-HK5 Miniature Solenoid ValvesDocument6 pagini5-HK5 Miniature Solenoid ValvessakscribÎncă nu există evaluări
- Sustainable Finance Esg Integration SolutionDocument5 paginiSustainable Finance Esg Integration SolutionRISHABH RAJ JAINÎncă nu există evaluări
- MANDATORYDocument7 paginiMANDATORYkamlesh yadavÎncă nu există evaluări
- Help CenterDocument4 paginiHelp CenterShivali VermaÎncă nu există evaluări
- The Osint Cyber War 2021-02-22Document26 paginiThe Osint Cyber War 2021-02-22Carlos Alberto Mendes BetinhoÎncă nu există evaluări
- Digital Front End Developement BTADocument4 paginiDigital Front End Developement BTAmannÎncă nu există evaluări
- Question Bank CHPT 1,2,6Document6 paginiQuestion Bank CHPT 1,2,61707pateldeepÎncă nu există evaluări
- Budget Template Updated 8857Document18 paginiBudget Template Updated 8857EbrahimAbuZaidÎncă nu există evaluări
- Assignment 5 MRP PDFDocument7 paginiAssignment 5 MRP PDFNegashÎncă nu există evaluări
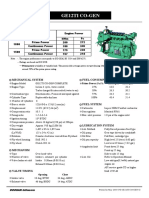
- Ge12ti Co Gen-GDocument2 paginiGe12ti Co Gen-GTilok DasÎncă nu există evaluări
- Define Field SelectionDocument3 paginiDefine Field SelectionSenthil NayagamÎncă nu există evaluări
- SLM 1453I: Operation and Application ManualDocument51 paginiSLM 1453I: Operation and Application ManualBob Chestnut100% (1)
- Experiment # 1: MATLAB Basics For Communication System Design ObjectiveDocument19 paginiExperiment # 1: MATLAB Basics For Communication System Design ObjectiveSyed F. JÎncă nu există evaluări
- Molex M-100 Catalog 1973Document28 paginiMolex M-100 Catalog 1973Tzouralas TheodorosÎncă nu există evaluări
- Digital Marketing Batch 8Document25 paginiDigital Marketing Batch 8Imron MashuriÎncă nu există evaluări
- Vaadin FlowDocument14 paginiVaadin FlowAnandhuBalanÎncă nu există evaluări
- Spring Batch Tutorial - Reading Information From A FileDocument21 paginiSpring Batch Tutorial - Reading Information From A FileBala KulandaiÎncă nu există evaluări
- As 2159 2009 Piling Design and InstallationDocument9 paginiAs 2159 2009 Piling Design and InstallationKinson LowÎncă nu există evaluări
- Sap Erp Financials Configuration and Design 2nd Ed 59c5c66e1723dd42ad224565Document1 paginăSap Erp Financials Configuration and Design 2nd Ed 59c5c66e1723dd42ad224565VManiKishoreÎncă nu există evaluări
- Sammuel Augusto Gomes MachadoDocument2 paginiSammuel Augusto Gomes MachadoSam MachadoÎncă nu există evaluări
- CATALOG 2017 (Branch-Wise)Document33 paginiCATALOG 2017 (Branch-Wise)RajeevSangamÎncă nu există evaluări
- QRadar SOAR PoX Product Education Quiz (SOAR PoX L4) Attempt ReviewDocument15 paginiQRadar SOAR PoX Product Education Quiz (SOAR PoX L4) Attempt ReviewLyu SeyÎncă nu există evaluări
- Update Asset SMBD 6okt2022Document5 paginiUpdate Asset SMBD 6okt2022PANCAWARNA AdventureÎncă nu există evaluări
- AristocratDocument38 paginiAristocratTiến ThànhÎncă nu există evaluări
- CS-C12BKPG Cu-2c24bkp5gDocument70 paginiCS-C12BKPG Cu-2c24bkp5gDũng LêÎncă nu există evaluări
- Zed-F9K: High Precision Dead Reckoning With Integrated IMU SensorsDocument2 paginiZed-F9K: High Precision Dead Reckoning With Integrated IMU SensorsStevan ZupunskiÎncă nu există evaluări
- Per 01a - Cargo Pumproom Entry PermitDocument3 paginiPer 01a - Cargo Pumproom Entry PermitRajesh NairÎncă nu există evaluări
- Cisco - HyperTerminal PDFDocument7 paginiCisco - HyperTerminal PDFsidneyiremarmaiaÎncă nu există evaluări
- Nvidia DGX Os 4 Server: Software Release NotesDocument19 paginiNvidia DGX Os 4 Server: Software Release Notesloreto07Încă nu există evaluări