S-ar putea să vă placă și
- Implementing 802.11, 802.16, and 802.20 Wireless Networks: Planning, Troubleshooting, and OperationsDe la EverandImplementing 802.11, 802.16, and 802.20 Wireless Networks: Planning, Troubleshooting, and OperationsEvaluare: 4.5 din 5 stele4.5/5 (2)
- Abb NGC 8206Document298 paginiAbb NGC 8206Tamjid KabirÎncă nu există evaluări
- Antenna Arraying Techniques in the Deep Space NetworkDe la EverandAntenna Arraying Techniques in the Deep Space NetworkÎncă nu există evaluări
- Sluu481 Tech RefDocument102 paginiSluu481 Tech RefAlexÎncă nu există evaluări
- Mixed-signal and DSP Design TechniquesDe la EverandMixed-signal and DSP Design TechniquesEvaluare: 5 din 5 stele5/5 (3)
- Sonometro Sound Track LXT - ManualDocument307 paginiSonometro Sound Track LXT - ManuallevoneÎncă nu există evaluări
- Platform Interference in Wireless Systems: Models, Measurement, and MitigationDe la EverandPlatform Interference in Wireless Systems: Models, Measurement, and MitigationEvaluare: 5 din 5 stele5/5 (1)
- Talon SRX Victor SPX - Software Reference Manual PDFDocument141 paginiTalon SRX Victor SPX - Software Reference Manual PDFDFGÎncă nu există evaluări
- Introduction to Web Matrix: ASP.NET Development for BeginnersDe la EverandIntroduction to Web Matrix: ASP.NET Development for BeginnersÎncă nu există evaluări
- JAX WS DocumentationDocument146 paginiJAX WS DocumentationjamesÎncă nu există evaluări
- Co-verification of Hardware and Software for ARM SoC DesignDe la EverandCo-verification of Hardware and Software for ARM SoC DesignÎncă nu există evaluări
- SeeSV-S205 User GuideDocument32 paginiSeeSV-S205 User Guidetaehyun KimÎncă nu există evaluări
- TekScope Help EN US 077 1699 05 - 077169905Document536 paginiTekScope Help EN US 077 1699 05 - 077169905Red Hat2KÎncă nu există evaluări
- SmartPSS User's Manual V1.11.0 201408Document102 paginiSmartPSS User's Manual V1.11.0 201408Freddy CervantesÎncă nu există evaluări
- 95-8560-7.0 (S3 Manual)Document355 pagini95-8560-7.0 (S3 Manual)Cristian CushquicullmaÎncă nu există evaluări
- User Manual: Ver.2.47 - February 11, 2016Document117 paginiUser Manual: Ver.2.47 - February 11, 2016The KidÎncă nu există evaluări
- Nas 351Document26 paginiNas 351Max LeandroÎncă nu există evaluări
- ISA-ES1 - 4ENH 3.0 OPER - HDBK - Ed01 PDFDocument532 paginiISA-ES1 - 4ENH 3.0 OPER - HDBK - Ed01 PDFBrunoRFÎncă nu există evaluări
- SUNSETv2.0 GuidelinesDocument118 paginiSUNSETv2.0 Guidelinesbits_who_am_iÎncă nu există evaluări
- Os Cli 664 Revd PDFDocument2.554 paginiOs Cli 664 Revd PDFedgarÎncă nu există evaluări
- #Instruction Sets V1.5RC-20220615Document71 pagini#Instruction Sets V1.5RC-20220615Juan C. Guarnizo BÎncă nu există evaluări
- SynchronizationDocument51 paginiSynchronizationAlexÎncă nu există evaluări
- Lab X3500 User ManualDocument113 paginiLab X3500 User ManualRenzo Jaime Gabriel Baltazar50% (4)
- Mindray Z50 Operator ManualDocument145 paginiMindray Z50 Operator ManualraulÎncă nu există evaluări
- Pion Reactor ConfigDocument120 paginiPion Reactor ConfiggowriÎncă nu există evaluări
- Pricer System Manual R5.31.0Document109 paginiPricer System Manual R5.31.0darkmyunÎncă nu există evaluări
- H 046 005788 00 1 0Document169 paginiH 046 005788 00 1 0rca ieftinÎncă nu există evaluări
- Ensite Pro Instruction Manual 2.0Document80 paginiEnsite Pro Instruction Manual 2.0Manuel HernandezÎncă nu există evaluări
- Lorad - M-Iv - Training HanbookDocument354 paginiLorad - M-Iv - Training HanbookCleberson Silveira Clementino75% (4)
- P80 Console Service Manual - 20039-179 - Rev A01-5 PDFDocument126 paginiP80 Console Service Manual - 20039-179 - Rev A01-5 PDFtopkat0Încă nu există evaluări
- A1.Pilot Pioneer User Manual V10.2Document283 paginiA1.Pilot Pioneer User Manual V10.2franz2383Încă nu există evaluări
- Sample 748086Document77 paginiSample 748086avi_weber100% (1)
- Service Manual: OnsoleDocument126 paginiService Manual: Onsoletopkat0Încă nu există evaluări
- JSFSkriptDocument68 paginiJSFSkriptbipin007Încă nu există evaluări
- ProBalancer Sport User Manual Rev 1 01Document48 paginiProBalancer Sport User Manual Rev 1 01KaradiasÎncă nu există evaluări
- EAST System ArchitectureDocument76 paginiEAST System Architecturesubrata dashÎncă nu există evaluări
- Power MACS 4000 User GuideDocument751 paginiPower MACS 4000 User GuideRex Blanco100% (2)
- 9012 0038 Teletrans4K User Manual Eng - Rev0Document108 pagini9012 0038 Teletrans4K User Manual Eng - Rev0Nicolas Silva BrionesÎncă nu există evaluări
- EMES60 Manual PDFDocument114 paginiEMES60 Manual PDFTheodoreÎncă nu există evaluări
- Ax5160 Ax5193 Startup enDocument41 paginiAx5160 Ax5193 Startup encai minkeÎncă nu există evaluări
- Mcosmos Changes eDocument66 paginiMcosmos Changes ecmm5477Încă nu există evaluări
- Foxboro 870ITPH Electrochemical Transmitter For PH, ORPDocument60 paginiFoxboro 870ITPH Electrochemical Transmitter For PH, ORPGabriel SilvaÎncă nu există evaluări
- PLANet RE User ManualDocument304 paginiPLANet RE User Manualhwidjaja88Încă nu există evaluări
- BC-2800 Operation's Manual V10.0 NeutralDocument286 paginiBC-2800 Operation's Manual V10.0 NeutralkiryÎncă nu există evaluări
- Analysis and Design of RF and Digital Systems Using Keysight SystemvueDocument159 paginiAnalysis and Design of RF and Digital Systems Using Keysight SystemvueNathaly NiamaÎncă nu există evaluări
- HCF Spec 60 1.0 PDFDocument26 paginiHCF Spec 60 1.0 PDFvikulovÎncă nu există evaluări
- TireScan ManualDocument281 paginiTireScan ManualGABRIELÎncă nu există evaluări
- ASPEN PLUS Unit Operation Models 11-1Document384 paginiASPEN PLUS Unit Operation Models 11-1Jamie Samuel100% (1)
- Os6450 HDW RevlDocument172 paginiOs6450 HDW Revlamel632Încă nu există evaluări
- VmDas Users Guide2009Document98 paginiVmDas Users Guide2009Taufik SuprayogoÎncă nu există evaluări
- ZX Spectrum Service ManualDocument60 paginiZX Spectrum Service ManualTudor StanciuÎncă nu există evaluări
- Tortoise SVN - User GuideDocument149 paginiTortoise SVN - User GuidesharathecÎncă nu există evaluări
- RxControl ManualDocument77 paginiRxControl ManualMoni ZaÎncă nu există evaluări
- Nera Mini-C - Service - Manual PDFDocument152 paginiNera Mini-C - Service - Manual PDFZakaria ChowdhuryÎncă nu există evaluări
- S850+ UserManualENGDocument50 paginiS850+ UserManualENGvlavureÎncă nu există evaluări
- Argos User's Manual © 2007-2016 CLS Last Updated On June 15, 2016Document64 paginiArgos User's Manual © 2007-2016 CLS Last Updated On June 15, 2016Elpe BibasÎncă nu există evaluări
- KofaxAnalyticsForCaptureAdministratorsGuide ENDocument209 paginiKofaxAnalyticsForCaptureAdministratorsGuide ENpatelhaÎncă nu există evaluări
- 1 9-SectionDocument190 pagini1 9-SectionchinkshadyÎncă nu există evaluări
- What Is Difference Between Maritime Survey N InspectionDocument1 paginăWhat Is Difference Between Maritime Survey N InspectionAjay SinghÎncă nu există evaluări
- Technical Specification DP SystemDocument48 paginiTechnical Specification DP SystemAjay SinghÎncă nu există evaluări
- The Apparent Solar TimeDocument3 paginiThe Apparent Solar TimeAjay SinghÎncă nu există evaluări
- ASM June 2019 ISM ManualDocument10 paginiASM June 2019 ISM ManualAjay Singh100% (1)
- B SC (Nautical)Document161 paginiB SC (Nautical)Ajay SinghÎncă nu există evaluări
- Indian Holiday ResortsDocument4 paginiIndian Holiday ResortsAjay SinghÎncă nu există evaluări
- Anchoring and What Precautions To TakeDocument2 paginiAnchoring and What Precautions To Takevikrami100% (2)
- First Aid KitDocument1 paginăFirst Aid KitAjay SinghÎncă nu există evaluări
- Emergency Towing Procedures Required For All ShipsDocument2 paginiEmergency Towing Procedures Required For All ShipsAjay Singh100% (1)
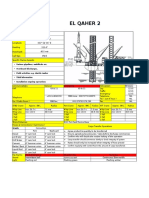
- ElQaher 2 Data CardDocument1 paginăElQaher 2 Data CardAjay SinghÎncă nu există evaluări
- EQUIPMENT No NA12 Speed Log RepeaterDocument2 paginiEQUIPMENT No NA12 Speed Log RepeaterAjay SinghÎncă nu există evaluări
- Equipment No Na01 RadarDocument2 paginiEquipment No Na01 RadarAjay SinghÎncă nu există evaluări
- Equipment No 25 & 26Document2 paginiEquipment No 25 & 26Ajay SinghÎncă nu există evaluări
- Equipment No Na18 AisDocument2 paginiEquipment No Na18 AisAjay SinghÎncă nu există evaluări
- Equipment No Na08 Echo SounderDocument2 paginiEquipment No Na08 Echo SounderAjay SinghÎncă nu există evaluări
- Procedure For Transmiting Designated VHF DSC Distress Alert From FurunoDocument1 paginăProcedure For Transmiting Designated VHF DSC Distress Alert From FurunoAjay SinghÎncă nu există evaluări
- Equipment No Na19 Magnetic CompasDocument2 paginiEquipment No Na19 Magnetic CompasAjay SinghÎncă nu există evaluări
- Equipment No Na16&Na17 AnemometerDocument2 paginiEquipment No Na16&Na17 AnemometerAjay SinghÎncă nu există evaluări
- Equipment No - Na13: Routine Checks Date Last Done Due Date RemarksDocument2 paginiEquipment No - Na13: Routine Checks Date Last Done Due Date RemarksAjay SinghÎncă nu există evaluări
- Equipment No Gm11 Fleet f77Document2 paginiEquipment No Gm11 Fleet f77Ajay SinghÎncă nu există evaluări
- Equipment No Gm03 & Gm04 VHFDocument2 paginiEquipment No Gm03 & Gm04 VHFAjay SinghÎncă nu există evaluări
- Equipment No Sg01 Aldis LampDocument2 paginiEquipment No Sg01 Aldis LampAjay SinghÎncă nu există evaluări
- EQUIPMENT No Fascimile Receiver GM08Document2 paginiEQUIPMENT No Fascimile Receiver GM08Ajay SinghÎncă nu există evaluări
- Equipment No - Gm02: Routine Checks Date Last Done Due Date RemarksDocument2 paginiEquipment No - Gm02: Routine Checks Date Last Done Due Date RemarksAjay SinghÎncă nu există evaluări
- Equipment No - Gm09: Routine Checks Date Last Done Due Date RemarksDocument2 paginiEquipment No - Gm09: Routine Checks Date Last Done Due Date RemarksAjay SinghÎncă nu există evaluări
- Equipment No GM 06 08vhf IcomDocument2 paginiEquipment No GM 06 08vhf IcomAjay SinghÎncă nu există evaluări
- Equipment No Gm07 Inmarsat CDocument2 paginiEquipment No Gm07 Inmarsat CAjay SinghÎncă nu există evaluări
- Equipment No - Gm10: Routine Checks Date Last Done Due Date RemarksDocument2 paginiEquipment No - Gm10: Routine Checks Date Last Done Due Date RemarksAjay SinghÎncă nu există evaluări
- Definition - What Does Computer Networking Mean?Document3 paginiDefinition - What Does Computer Networking Mean?Kenneth Jed SolomoÎncă nu există evaluări
- Systems Integration and DisplayDocument36 paginiSystems Integration and DisplayMahmud R RafiÎncă nu există evaluări
- GCSE (J277) Keywords For GcseDocument16 paginiGCSE (J277) Keywords For GcseEmma StevensÎncă nu există evaluări
- UMC100 Modbus InterfaceDocument37 paginiUMC100 Modbus InterfaceRatheesh KumarÎncă nu există evaluări
- H560N Quick Start Guide: Wireless RouterDocument17 paginiH560N Quick Start Guide: Wireless RouterCarlos Moreno GarcíaÎncă nu există evaluări
- WL 299CDocument19 paginiWL 299CSorin GhitaÎncă nu există evaluări
- NetBackup 52xx Admin Guide 25Document242 paginiNetBackup 52xx Admin Guide 25acidlikeboy100% (1)
- 2 - 1 - Basic Switch LABDocument14 pagini2 - 1 - Basic Switch LABVanesaaÎncă nu există evaluări
- File C Users Francisco - Torosazo AppData Local Temp hh7537 PDFDocument16 paginiFile C Users Francisco - Torosazo AppData Local Temp hh7537 PDFfranciscotorosazoÎncă nu există evaluări
- GNS3 For Large Scale Simulation: George LiuDocument67 paginiGNS3 For Large Scale Simulation: George LiunestelÎncă nu există evaluări
- PDF Read Write Parameters With SFB52 53 Via PN en V1 2Document45 paginiPDF Read Write Parameters With SFB52 53 Via PN en V1 2edimarÎncă nu există evaluări
- Lesson Plans Testout Networkpro Enus 4 - 1 - 2 PDFDocument99 paginiLesson Plans Testout Networkpro Enus 4 - 1 - 2 PDFJoeven PantaleonÎncă nu există evaluări
- What Is Computer Networking - Basics, Uses & ComponentsDocument8 paginiWhat Is Computer Networking - Basics, Uses & ComponentsMike MikkelsenÎncă nu există evaluări
- Transcend T Sonic 650 ManualDocument43 paginiTranscend T Sonic 650 ManualananthkrkÎncă nu există evaluări
- Ixy Writing User Space Network DriversDocument14 paginiIxy Writing User Space Network DriversMiloš SamardžijaÎncă nu există evaluări
- D. A and B TrueDocument2 paginiD. A and B TrueAkbar FalladikaÎncă nu există evaluări
- Practical List in Net EssDocument6 paginiPractical List in Net EssKazi Mahbubur RahmanÎncă nu există evaluări
- Assignment 2Document15 paginiAssignment 2api-311925791Încă nu există evaluări
- Intro 2 CiscoDocument196 paginiIntro 2 CiscoJocylen100% (1)
- 0.2 Performance Criteria Checklist Study Guide CHECKED SUBMITDocument7 pagini0.2 Performance Criteria Checklist Study Guide CHECKED SUBMITMichael EalaÎncă nu există evaluări
- Connecting DevicesDocument41 paginiConnecting DevicesOsmar IxÎncă nu există evaluări
- HPE Performance Cluster Manager Installation Guide-A00048259en - UsDocument213 paginiHPE Performance Cluster Manager Installation Guide-A00048259en - UsMandoiu StefanÎncă nu există evaluări
- Teccrs 3006Document252 paginiTeccrs 3006masterlinh2008Încă nu există evaluări
- Ricoh 1013 Product Support GuideDocument9 paginiRicoh 1013 Product Support GuideRobert BeamanÎncă nu există evaluări
- 10gigethr 02 Iexgbe b11311303 Ethernet Driver Release Notes Edition 2Document13 pagini10gigethr 02 Iexgbe b11311303 Ethernet Driver Release Notes Edition 2NameÎncă nu există evaluări
- Components of A LAN NetworkDocument8 paginiComponents of A LAN Networkranadip dasÎncă nu există evaluări
- Tcpip Over Ax25Document8 paginiTcpip Over Ax25hendiekÎncă nu există evaluări
- Beyond Syllabus - 2Document4 paginiBeyond Syllabus - 2Aman GoyalÎncă nu există evaluări
- CCBoot Cloud ManualDocument506 paginiCCBoot Cloud ManualAbdallah SuleimanÎncă nu există evaluări
- Model 1310 Network Installation ManualDocument62 paginiModel 1310 Network Installation ManualRicardo Vazquez SalinasÎncă nu există evaluări
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersDe la Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersEvaluare: 5 din 5 stele5/5 (1)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosDe la EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosEvaluare: 5 din 5 stele5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDe la EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionEvaluare: 4.5 din 5 stele4.5/5 (543)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tDe la EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tEvaluare: 4.5 din 5 stele4.5/5 (27)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonDe la EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonEvaluare: 5 din 5 stele5/5 (2)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesDe la EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesEvaluare: 5 din 5 stele5/5 (1)
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...De la EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Încă nu există evaluări
- Teach Yourself Electricity and Electronics, 6th EditionDe la EverandTeach Yourself Electricity and Electronics, 6th EditionEvaluare: 3.5 din 5 stele3.5/5 (15)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsDe la EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsÎncă nu există evaluări
- Analog Design and Simulation Using OrCAD Capture and PSpiceDe la EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceÎncă nu există evaluări
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDe la EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeEvaluare: 4.5 din 5 stele4.5/5 (10)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialDe la EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialEvaluare: 3.5 din 5 stele3.5/5 (3)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsDe la EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsEvaluare: 3.5 din 5 stele3.5/5 (2)
- Current Interruption Transients CalculationDe la EverandCurrent Interruption Transients CalculationEvaluare: 4 din 5 stele4/5 (1)
- Power Electronics Diploma Interview Q&A: Career GuideDe la EverandPower Electronics Diploma Interview Q&A: Career GuideÎncă nu există evaluări
- Wearable Sensors: Fundamentals, Implementation and ApplicationsDe la EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovÎncă nu există evaluări
- A Mind at Play: How Claude Shannon Invented the Information AgeDe la EverandA Mind at Play: How Claude Shannon Invented the Information AgeEvaluare: 4 din 5 stele4/5 (53)
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldDe la EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldEvaluare: 4 din 5 stele4/5 (87)