S-ar putea să vă placă și
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- ASM June 2019 ISM ManualDocument10 paginiASM June 2019 ISM ManualAjay Singh100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Anchoring and What Precautions To TakeDocument2 paginiAnchoring and What Precautions To Takevikrami100% (2)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- B SC (Nautical)Document161 paginiB SC (Nautical)Ajay SinghÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- What Is Difference Between Maritime Survey N InspectionDocument1 paginăWhat Is Difference Between Maritime Survey N InspectionAjay SinghÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Apparent Solar TimeDocument3 paginiThe Apparent Solar TimeAjay SinghÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Procedure For Transmiting Designated VHF DSC Distress Alert From FurunoDocument1 paginăProcedure For Transmiting Designated VHF DSC Distress Alert From FurunoAjay SinghÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- First Aid KitDocument1 paginăFirst Aid KitAjay SinghÎncă nu există evaluări
- Indian Holiday ResortsDocument4 paginiIndian Holiday ResortsAjay SinghÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Technical Specification DP SystemDocument48 paginiTechnical Specification DP SystemAjay SinghÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Emergency Towing Procedures Required For All ShipsDocument2 paginiEmergency Towing Procedures Required For All ShipsAjay Singh100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Equipment No Sg01 Aldis LampDocument2 paginiEquipment No Sg01 Aldis LampAjay SinghÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Equipment No Na08 Echo SounderDocument2 paginiEquipment No Na08 Echo SounderAjay SinghÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
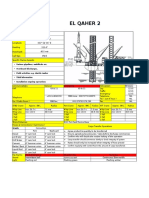
- ElQaher 2 Data CardDocument1 paginăElQaher 2 Data CardAjay SinghÎncă nu există evaluări
- Equipment No 25 & 26Document2 paginiEquipment No 25 & 26Ajay SinghÎncă nu există evaluări
- Equipment No - Na13: Routine Checks Date Last Done Due Date RemarksDocument2 paginiEquipment No - Na13: Routine Checks Date Last Done Due Date RemarksAjay SinghÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Equipment No Na18 AisDocument2 paginiEquipment No Na18 AisAjay SinghÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Equipment No Na19 Magnetic CompasDocument2 paginiEquipment No Na19 Magnetic CompasAjay SinghÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- EQUIPMENT No NA12 Speed Log RepeaterDocument2 paginiEQUIPMENT No NA12 Speed Log RepeaterAjay SinghÎncă nu există evaluări
- Equipment No Na01 RadarDocument2 paginiEquipment No Na01 RadarAjay SinghÎncă nu există evaluări
- Equipment No Na16&Na17 AnemometerDocument2 paginiEquipment No Na16&Na17 AnemometerAjay SinghÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Equipment No Gm11 Fleet f77Document2 paginiEquipment No Gm11 Fleet f77Ajay SinghÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Equipment No Gm03 & Gm04 VHFDocument2 paginiEquipment No Gm03 & Gm04 VHFAjay SinghÎncă nu există evaluări
- Equipment No - Gm09: Routine Checks Date Last Done Due Date RemarksDocument2 paginiEquipment No - Gm09: Routine Checks Date Last Done Due Date RemarksAjay SinghÎncă nu există evaluări
- Equipment No - Gm02: Routine Checks Date Last Done Due Date RemarksDocument2 paginiEquipment No - Gm02: Routine Checks Date Last Done Due Date RemarksAjay SinghÎncă nu există evaluări
- Equipment No GM 06 08vhf IcomDocument2 paginiEquipment No GM 06 08vhf IcomAjay SinghÎncă nu există evaluări
- Equipment No - Gm10: Routine Checks Date Last Done Due Date RemarksDocument2 paginiEquipment No - Gm10: Routine Checks Date Last Done Due Date RemarksAjay SinghÎncă nu există evaluări
- Equipment No Gm07 Inmarsat CDocument2 paginiEquipment No Gm07 Inmarsat CAjay SinghÎncă nu există evaluări
- EQUIPMENT No Fascimile Receiver GM08Document2 paginiEQUIPMENT No Fascimile Receiver GM08Ajay SinghÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)