S-ar putea să vă placă și
- Sensors 19 04738 v2Document17 paginiSensors 19 04738 v2athar shahzadÎncă nu există evaluări
- Ece - Ijeceierd - All New 3Document11 paginiEce - Ijeceierd - All New 3global-marketin8184Încă nu există evaluări
- Integrated Image Processing and Path Planning For Robotic SketchingDocument6 paginiIntegrated Image Processing and Path Planning For Robotic SketchingĐào Văn HưngÎncă nu există evaluări
- A Robotic System For Road Lane PaintingDocument8 paginiA Robotic System For Road Lane Paintingapi-19757021Încă nu există evaluări
- Real Time Detection System For Rail Surface Defects Based On Machine VisionDocument11 paginiReal Time Detection System For Rail Surface Defects Based On Machine VisionRubenÎncă nu există evaluări
- 2D Imagenes - CompressedDocument13 pagini2D Imagenes - CompressedEdgar Enrique Vilca RomeroÎncă nu există evaluări
- Computer Vision Techniques For Traffic Flow ComputDocument11 paginiComputer Vision Techniques For Traffic Flow Computharrouche riadhÎncă nu există evaluări
- Manou FAIM2022Document8 paginiManou FAIM2022George VosniakosÎncă nu există evaluări
- Real-Time Obstacle Detection Using Range Images: Processing Dynamically-Sized Sliding Windows On A GPUDocument13 paginiReal-Time Obstacle Detection Using Range Images: Processing Dynamically-Sized Sliding Windows On A GPURoger SacchelliÎncă nu există evaluări
- A Robotics and Computer-Aided Procedure For Defect EvaluationDocument18 paginiA Robotics and Computer-Aided Procedure For Defect Evaluationmark anthony balberonaÎncă nu există evaluări
- Image Processing To Automate Condition Assessment of Overhead Line ComponentsDocument6 paginiImage Processing To Automate Condition Assessment of Overhead Line Componentswai_li_8Încă nu există evaluări
- Badminton Playing Robot - A Multidisciplinary Test Case in MechatronicsDocument7 paginiBadminton Playing Robot - A Multidisciplinary Test Case in MechatronicsSofyan TsauriÎncă nu există evaluări
- Thai Nguyen University of Technology Faculty of International TrainingDocument16 paginiThai Nguyen University of Technology Faculty of International TrainingTrung HoàngÎncă nu există evaluări
- 3D Surveillance Maps Using Monocular SLAMDocument7 pagini3D Surveillance Maps Using Monocular SLAMAlexandreSidantÎncă nu există evaluări
- Automation in Construction: Takehiro Tsuruta, Kazuyuki Miura, Mikita Miyaguchi TDocument11 paginiAutomation in Construction: Takehiro Tsuruta, Kazuyuki Miura, Mikita Miyaguchi TArabindcra BiswasÎncă nu există evaluări
- Applied Sciences: Receding-Horizon Vision Guidance With Smooth Trajectory Blending in The Field of View of Mobile RobotsDocument16 paginiApplied Sciences: Receding-Horizon Vision Guidance With Smooth Trajectory Blending in The Field of View of Mobile RobotsAan Aldian syahÎncă nu există evaluări
- Intelligent Mobility: Autonomous Outdoor Robotics at The DFKIDocument7 paginiIntelligent Mobility: Autonomous Outdoor Robotics at The DFKIFernando MartinezÎncă nu există evaluări
- Automated Tower Crane Erection Planning in Virtual ConstructionDocument2 paginiAutomated Tower Crane Erection Planning in Virtual ConstructionSinggih Tendem Arek MenditÎncă nu există evaluări
- S Ex ParcialDocument9 paginiS Ex ParcialACUÑA CARDENAS AMADOR MICHAELÎncă nu există evaluări
- Reverse Engineering of Pump Casing and ImpellerDocument12 paginiReverse Engineering of Pump Casing and ImpellerEmad BadrÎncă nu există evaluări
- An Ef Cient Regression Method For 3D Object Localization in Machine Vision SystemsDocument11 paginiAn Ef Cient Regression Method For 3D Object Localization in Machine Vision SystemsIAES International Journal of Robotics and AutomationÎncă nu există evaluări
- Cost Effective Recognition and Classification of Moving Objects Using SimulinkDocument10 paginiCost Effective Recognition and Classification of Moving Objects Using Simulinknam bachÎncă nu există evaluări
- Case Study In-Line Robotic InspectionDocument4 paginiCase Study In-Line Robotic InspectionKnezevic BojanÎncă nu există evaluări
- 3D-Odometry For Rough Terrain - Towards Real 3D Navigation: Pierre Lamon and Roland SiegwartDocument7 pagini3D-Odometry For Rough Terrain - Towards Real 3D Navigation: Pierre Lamon and Roland SiegwartTrương Đức BìnhÎncă nu există evaluări
- Sensors: Analytical Modeling For A Video-Based Vehicle Speed Measurement FrameworkDocument10 paginiSensors: Analytical Modeling For A Video-Based Vehicle Speed Measurement FrameworkManuel Barrezueta BarzolaÎncă nu există evaluări
- Cartesian coordinate robot designDocument2 paginiCartesian coordinate robot designseehari0% (1)
- A Robotic Automatic Assembly System Based On VisioDocument19 paginiA Robotic Automatic Assembly System Based On VisioXavier Eduardo100% (1)
- Keyframe-Based Tracking For Rotoscoping and AnimationDocument8 paginiKeyframe-Based Tracking For Rotoscoping and AnimationnaginatÎncă nu există evaluări
- Research Article: Real-Time Vehicle Detection Using Cross-Correlation and 2D-DWT For Feature ExtractionDocument10 paginiResearch Article: Real-Time Vehicle Detection Using Cross-Correlation and 2D-DWT For Feature ExtractionazedÎncă nu există evaluări
- Wheel Alignment Inspectionby 3 DPoint Cloud MonitoringDocument19 paginiWheel Alignment Inspectionby 3 DPoint Cloud Monitoringfaiq amhar pamungkasÎncă nu există evaluări
- Applied Sciences: A Computer Vision Based Conveyor Deviation Detection SystemDocument10 paginiApplied Sciences: A Computer Vision Based Conveyor Deviation Detection SystemWalid HalloucheÎncă nu există evaluări
- The Development of A Mobile Manipulator Imaging System For Bridge Crack InspectionDocument13 paginiThe Development of A Mobile Manipulator Imaging System For Bridge Crack InspectionIngrid GiacomeliÎncă nu există evaluări
- Container Ship Cell Guide Accuracy Check Technology Based on 3D Point Cloud SegmentationDocument13 paginiContainer Ship Cell Guide Accuracy Check Technology Based on 3D Point Cloud SegmentationMara Rebeka HerzogÎncă nu există evaluări
- Construction of Cubic Structures with Quadrotor Teams (CSQSDocument8 paginiConstruction of Cubic Structures with Quadrotor Teams (CSQSGef FaeldenÎncă nu există evaluări
- Vehicle Detection Using Image Processing and Fuzzy Logic: International Journal of Computer Science & CommunicationDocument3 paginiVehicle Detection Using Image Processing and Fuzzy Logic: International Journal of Computer Science & CommunicationcintemaniÎncă nu există evaluări
- Dynamic Path Tracking of Industrial RobotsDocument12 paginiDynamic Path Tracking of Industrial RobotsConway MartinezÎncă nu există evaluări
- 1 s2.0 S0263224120305868 MainDocument14 pagini1 s2.0 S0263224120305868 MainKhairul AfhamÎncă nu există evaluări
- IJCSESDocument27 paginiIJCSESijcsesÎncă nu există evaluări
- Template Tracking and Visual Servoing for Alignment of AUVsDocument6 paginiTemplate Tracking and Visual Servoing for Alignment of AUVsnarcisprÎncă nu există evaluări
- Saxena MAV Perspectivecues StairsDocument8 paginiSaxena MAV Perspectivecues StairsAditya BhatÎncă nu există evaluări
- Remote Sensing: Tunnel Monitoring and Measuring System Using Mobile Laser Scanning: Design and DeploymentDocument19 paginiRemote Sensing: Tunnel Monitoring and Measuring System Using Mobile Laser Scanning: Design and DeploymentBùi Văn SinhÎncă nu există evaluări
- A Study in Industrial Robot ProgrammingDocument26 paginiA Study in Industrial Robot ProgrammingPatel Dhaval100% (1)
- A Modular Control Architecture For Semi-Autonomous NavigationDocument4 paginiA Modular Control Architecture For Semi-Autonomous NavigationKai GustavÎncă nu există evaluări
- Base PaperDocument12 paginiBase PaperRenji RajÎncă nu există evaluări
- Fork Agv: Estimation of Combined Magnetic Sensor With Vision Guide Applied On Automatic Mobile Transporter For Navigation and Accurate PositioningDocument7 paginiFork Agv: Estimation of Combined Magnetic Sensor With Vision Guide Applied On Automatic Mobile Transporter For Navigation and Accurate PositioningnasyirtamaraÎncă nu există evaluări
- Autonomous Seam Acquisition For Robotic Welding Based On Passive VisionDocument22 paginiAutonomous Seam Acquisition For Robotic Welding Based On Passive VisionKartik KumarÎncă nu există evaluări
- Obstacle Detection Using Hough Transform: Elated WorkDocument4 paginiObstacle Detection Using Hough Transform: Elated WorkFloyd ClarkeÎncă nu există evaluări
- Deep VP Submit MailDocument13 paginiDeep VP Submit MailErickson OngÎncă nu există evaluări
- Rail Track Flaw Detection Using MATLABDocument28 paginiRail Track Flaw Detection Using MATLABeshuÎncă nu există evaluări
- A Rapid Lift Study Generation System For Heavy Industrial ProjectsDocument10 paginiA Rapid Lift Study Generation System For Heavy Industrial Projectsgusyahri001Încă nu există evaluări
- F. Goto: Niigata Engineering Co.: Development of A Robot Asphalt PaverDocument8 paginiF. Goto: Niigata Engineering Co.: Development of A Robot Asphalt PaverKadirÎncă nu există evaluări
- Obstacles Avoidance For An Articulated Robot Using Modified Smooth Path PlanningDocument6 paginiObstacles Avoidance For An Articulated Robot Using Modified Smooth Path PlanningKaranÎncă nu există evaluări
- Computer Vision Assists VR CalibrationDocument14 paginiComputer Vision Assists VR CalibrationMudit BahugunaÎncă nu există evaluări
- IJETR021664Document5 paginiIJETR021664erpublicationÎncă nu există evaluări
- Iryani 2014Document6 paginiIryani 2014Mauricio JaramilloÎncă nu există evaluări
- Automatic Reconstruction of 3D CAD Models From Digital ScansDocument35 paginiAutomatic Reconstruction of 3D CAD Models From Digital Scansirinuca12Încă nu există evaluări
- Cost-Effective Vision-Based System For Monitoring Dynamic Response of Civil Engineering StructuresDocument19 paginiCost-Effective Vision-Based System For Monitoring Dynamic Response of Civil Engineering StructuresCESARÎncă nu există evaluări
- SC Book 2014-027Document18 paginiSC Book 2014-027Khaled ToffahaÎncă nu există evaluări
- Planar Linkage Synthesis: A modern CAD based approachDe la EverandPlanar Linkage Synthesis: A modern CAD based approachÎncă nu există evaluări
- MMD Ques - SSEMM - MP1Document9 paginiMMD Ques - SSEMM - MP1Ajay SinghÎncă nu există evaluări
- TidesDocument36 paginiTidesAjay SinghÎncă nu există evaluări
- Ship Waves in ChannelDocument25 paginiShip Waves in ChannelAjay SinghÎncă nu există evaluări
- B SC (Nautical)Document161 paginiB SC (Nautical)Ajay SinghÎncă nu există evaluări
- Emergency Towing Procedures Required For All ShipsDocument2 paginiEmergency Towing Procedures Required For All ShipsAjay Singh100% (1)
- Fundamentals of Plate TectonicsDocument5 paginiFundamentals of Plate TectonicsAjay SinghÎncă nu există evaluări
- Geology and OceanographyDocument1 paginăGeology and OceanographyAjay Singh100% (1)
- The Apparent Solar TimeDocument3 paginiThe Apparent Solar TimeAjay SinghÎncă nu există evaluări
- Fundamentals of Plate TectonicsDocument5 paginiFundamentals of Plate TectonicsAjay SinghÎncă nu există evaluări
- Fundamentals of Plate TectonicsDocument5 paginiFundamentals of Plate TectonicsAjay SinghÎncă nu există evaluări
- ASM June 2019 ISM ManualDocument10 paginiASM June 2019 ISM ManualAjay Singh100% (1)
- What Is Difference Between Maritime Survey N InspectionDocument1 paginăWhat Is Difference Between Maritime Survey N InspectionAjay SinghÎncă nu există evaluări
- Manual Resuscitator InstDocument7 paginiManual Resuscitator InstAjay SinghÎncă nu există evaluări
- Technical Specification DP SystemDocument48 paginiTechnical Specification DP SystemAjay SinghÎncă nu există evaluări
- Indian Holiday ResortsDocument4 paginiIndian Holiday ResortsAjay SinghÎncă nu există evaluări
- Equipment No 25 & 26Document2 paginiEquipment No 25 & 26Ajay SinghÎncă nu există evaluări
- Ship TermsDocument30 paginiShip TermsAjay SinghÎncă nu există evaluări
- Anchoring and What Precautions To TakeDocument2 paginiAnchoring and What Precautions To Takevikrami100% (2)
- Draught Survey BlankDocument3 paginiDraught Survey BlankThyago de LellysÎncă nu există evaluări
- First Aid KitDocument1 paginăFirst Aid KitAjay SinghÎncă nu există evaluări
- Procedure For Transmiting Designated VHF DSC Distress Alert From FurunoDocument1 paginăProcedure For Transmiting Designated VHF DSC Distress Alert From FurunoAjay SinghÎncă nu există evaluări
- DrillingBasics English Version English NY 2008Document76 paginiDrillingBasics English Version English NY 2008Ajay SinghÎncă nu există evaluări
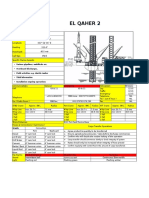
- ElQaher 2 Data CardDocument1 paginăElQaher 2 Data CardAjay SinghÎncă nu există evaluări
- BL204 Radio SystemsDocument8 paginiBL204 Radio SystemsAjay SinghÎncă nu există evaluări
- Phasei&II Syllabus 111010Document30 paginiPhasei&II Syllabus 111010He SheÎncă nu există evaluări
- Equipment No Na01 RadarDocument2 paginiEquipment No Na01 RadarAjay SinghÎncă nu există evaluări
- Draught Survey BlankDocument3 paginiDraught Survey BlankThyago de LellysÎncă nu există evaluări
- Equipment No Na11 Speed LogDocument2 paginiEquipment No Na11 Speed LogAjay SinghÎncă nu există evaluări
- Equipment No Sg01 Aldis LampDocument2 paginiEquipment No Sg01 Aldis LampAjay SinghÎncă nu există evaluări
- EQUIPMENT No NA12 Speed Log RepeaterDocument2 paginiEQUIPMENT No NA12 Speed Log RepeaterAjay SinghÎncă nu există evaluări
- English - Vocabulary - in - Use - Pre - Intermediate - and - Intermediate - Book 2Document2 paginiEnglish - Vocabulary - in - Use - Pre - Intermediate - and - Intermediate - Book 2Наталия БруслинецÎncă nu există evaluări
- Rubric WordsmithDocument6 paginiRubric Wordsmithapi-200845891Încă nu există evaluări
- Psychotherapy Relationships That Work: Volume 1: Evidence-Based Therapist ContributionsDocument715 paginiPsychotherapy Relationships That Work: Volume 1: Evidence-Based Therapist ContributionsErick de Oliveira Tavares100% (5)
- (1964) AC 763 Help: House of Lords Chandler and OthersDocument22 pagini(1964) AC 763 Help: House of Lords Chandler and OthersShehzad HaiderÎncă nu există evaluări
- Daß Ich Erkenne, Was Die Welt Im Innersten Zusammenhält (Lines 382-83) So That I Know What Holds The Innermost World TogetherDocument2 paginiDaß Ich Erkenne, Was Die Welt Im Innersten Zusammenhält (Lines 382-83) So That I Know What Holds The Innermost World TogetherEmanuel MoşmanuÎncă nu există evaluări
- Communicative Approach - ChomskyDocument4 paginiCommunicative Approach - ChomskyMiss AbrilÎncă nu există evaluări
- Analogs of Quantum Hall Effect Edge States in Photonic CrystalsDocument23 paginiAnalogs of Quantum Hall Effect Edge States in Photonic CrystalsSangat BaikÎncă nu există evaluări
- EE6403-Discrete Time Systems and Signal ProcessingDocument17 paginiEE6403-Discrete Time Systems and Signal ProcessingBakru TheenÎncă nu există evaluări
- 489-F Latest JudgmentDocument15 pagini489-F Latest JudgmentMoving StepÎncă nu există evaluări
- Chronic Laryngitis in CHU Yalgado Ouedraogo: Epidemiological and Diagnostic AspectsDocument4 paginiChronic Laryngitis in CHU Yalgado Ouedraogo: Epidemiological and Diagnostic AspectsMarlina ElvianaÎncă nu există evaluări
- Definitions - Estoppel PDFDocument4 paginiDefinitions - Estoppel PDFsrrockygÎncă nu există evaluări
- Shukr Thankfulness To Allah Grade 12Document21 paginiShukr Thankfulness To Allah Grade 12Salman Mohammed AbdullahÎncă nu există evaluări
- NCM 107maternal FinalsDocument84 paginiNCM 107maternal FinalsFranz goÎncă nu există evaluări
- Practice Test 4: Explorer's Rainforest Trip and Blind AdventurerDocument6 paginiPractice Test 4: Explorer's Rainforest Trip and Blind AdventurerKhang Nguyen TienÎncă nu există evaluări
- GR 11 SLK Pe 1 Week 2 1ST Sem PDFDocument10 paginiGR 11 SLK Pe 1 Week 2 1ST Sem PDFwinslet villanuevaÎncă nu există evaluări
- Report Daftar Penerima Kuota Telkomsel Dan Indosat 2021 FSEIDocument26 paginiReport Daftar Penerima Kuota Telkomsel Dan Indosat 2021 FSEIHafizh ZuhdaÎncă nu există evaluări
- Inquisitor Character Creation and AdvancementDocument10 paginiInquisitor Character Creation and AdvancementMichael MonchampÎncă nu există evaluări
- SF3 - 2022 - Grade 8 SAMPLEDocument2 paginiSF3 - 2022 - Grade 8 SAMPLEANEROSE DASIONÎncă nu există evaluări
- 7 Ways To Shortlist The Right StocksDocument10 pagini7 Ways To Shortlist The Right Stockskrana26Încă nu există evaluări
- Lindtner, Ch. - Madhyamakahrdayam of BhavyaDocument223 paginiLindtner, Ch. - Madhyamakahrdayam of Bhavyathe Carvaka100% (2)
- Women &literatureDocument54 paginiWomen &literatureAicha ZianeÎncă nu există evaluări
- IntroDocument1 paginăIntroaravinthr1989Încă nu există evaluări
- Hamlet Act 3 Scene 1Document4 paginiHamlet Act 3 Scene 1Αθηνουλα ΑθηναÎncă nu există evaluări
- Kinder DLP Lesson-Exemplar-Week-25-Day-2Document16 paginiKinder DLP Lesson-Exemplar-Week-25-Day-2Leonor BagnosÎncă nu există evaluări
- Physics and Metaphysics - CTMUDocument21 paginiPhysics and Metaphysics - CTMUisotelesis100% (2)
- Microalgae PDFDocument20 paginiMicroalgae PDFaris_nurhidayatÎncă nu există evaluări
- Quieting of TitleDocument11 paginiQuieting of TitleJONA PHOEBE MANGALINDANÎncă nu există evaluări
- 101 Poisons Guide for D&D PlayersDocument16 pagini101 Poisons Guide for D&D PlayersmighalisÎncă nu există evaluări
- Sound of SundayDocument3 paginiSound of SundayJean PaladanÎncă nu există evaluări
- Political Science Most Important Questions Part 1 PDFDocument2 paginiPolitical Science Most Important Questions Part 1 PDFJayateerth KulkarniÎncă nu există evaluări