S-ar putea să vă placă și
- R07 Set No. 2Document8 paginiR07 Set No. 2chenumallaÎncă nu există evaluări
- Digital Control Systems May 2007 Question PaperDocument8 paginiDigital Control Systems May 2007 Question Paperelimelek100% (3)
- rr420201 Digital Control SystemsDocument8 paginirr420201 Digital Control SystemsSRINIVASA RAO GANTAÎncă nu există evaluări
- 4364 540 DigitalControlDocument2 pagini4364 540 DigitalControlyogesh_b_kÎncă nu există evaluări
- CS Previous Question PapersDocument48 paginiCS Previous Question PapersShaleva SinghÎncă nu există evaluări
- 4364 523 CsiiDocument4 pagini4364 523 Csiiyogesh_b_kÎncă nu există evaluări
- JNTU Old Question Papers 2007Document7 paginiJNTU Old Question Papers 2007Srinivasa Rao GÎncă nu există evaluări
- Jntuworld: R05 Set No. 2Document8 paginiJntuworld: R05 Set No. 2vanamgouthamÎncă nu există evaluări
- Code No: 35051Document8 paginiCode No: 35051SRINIVASA RAO GANTAÎncă nu există evaluări
- Code - No: 45106Document2 paginiCode - No: 45106Raj SamuelÎncă nu există evaluări
- Nr220405-Control SystemsDocument8 paginiNr220405-Control SystemsSRINIVASA RAO GANTAÎncă nu există evaluări
- EC8391 - Control Systems EngineeringDocument3 paginiEC8391 - Control Systems Engineeringsyed1188Încă nu există evaluări
- rr420201 Digital Control SystemsDocument8 paginirr420201 Digital Control SystemsSrinivasa Rao GÎncă nu există evaluări
- Question Paper Code: 55336: B.E./B.Tech. DEGREE EXAMINATIONS, NOV./DEC. 2011 Regulations 2008Document4 paginiQuestion Paper Code: 55336: B.E./B.Tech. DEGREE EXAMINATIONS, NOV./DEC. 2011 Regulations 2008Sarika VadivelanÎncă nu există evaluări
- EC 2255 Control SystemsDocument5 paginiEC 2255 Control SystemsselvijeganÎncă nu există evaluări
- Question Paper Code: 11287Document5 paginiQuestion Paper Code: 11287Nishanth NiraiÎncă nu există evaluări
- r05322201 Digital and Optimal Control SystemsDocument8 paginir05322201 Digital and Optimal Control SystemsSRINIVASA RAO GANTAÎncă nu există evaluări
- PEE-504 IDdcsE0484Document2 paginiPEE-504 IDdcsE0484Melissa CannonÎncă nu există evaluări
- T.E. (Electrical) (Semester - II) Control System - I: Time: Hours) (Max. Marks: 70 Instructions To The CandidatesDocument4 paginiT.E. (Electrical) (Semester - II) Control System - I: Time: Hours) (Max. Marks: 70 Instructions To The CandidatesShubham KaklijÎncă nu există evaluări
- Cs April 2011Document8 paginiCs April 201129viswa12Încă nu există evaluări
- Control System Aprilmay 2010Document4 paginiControl System Aprilmay 2010sivaeinfoÎncă nu există evaluări
- RR420201-DIGITAL-CONTROL-SYSTEMS June2007Document8 paginiRR420201-DIGITAL-CONTROL-SYSTEMS June2007singnamonivinaykumarÎncă nu există evaluări
- 9A02503 Control SystemsDocument4 pagini9A02503 Control SystemssivabharathamurthyÎncă nu există evaluări
- Cs April 2010Document8 paginiCs April 201029viswa12Încă nu există evaluări
- Control SystemsDocument8 paginiControl Systemsvasantha_btechÎncă nu există evaluări
- Set A Roll 1-16Document2 paginiSet A Roll 1-16jagat bhusalÎncă nu există evaluări
- Question Paper Code:: (10×2 20 Marks)Document4 paginiQuestion Paper Code:: (10×2 20 Marks)MohamedÎncă nu există evaluări
- Process Dynamics and ControlDocument9 paginiProcess Dynamics and Controlbhaskar537750% (2)
- R7220402 Control SystemsDocument2 paginiR7220402 Control SystemssivabharathamurthyÎncă nu există evaluări
- rr321303 Advanced Control SystemsDocument8 paginirr321303 Advanced Control SystemsSRINIVASA RAO GANTAÎncă nu există evaluări
- Ec2255 Control SystemsDocument4 paginiEc2255 Control SystemsSree GaneshÎncă nu există evaluări
- Contol SystemsDocument4 paginiContol SystemsselvijeganÎncă nu există evaluări
- Question Paper Code:: Reg. No.Document3 paginiQuestion Paper Code:: Reg. No.VinayÎncă nu există evaluări
- May Jun 2016Document4 paginiMay Jun 2016ABC CheckÎncă nu există evaluări
- r05220205 Control SystemsDocument9 paginir05220205 Control SystemsSrinivasa Rao G100% (3)
- ControlDocument13 paginiControlNiaz ManikÎncă nu există evaluări
- Digital Control System Paper PDFDocument2 paginiDigital Control System Paper PDFdeepaksaini14Încă nu există evaluări
- Process Dynamics and Control PREV PAPERDocument9 paginiProcess Dynamics and Control PREV PAPERNisha TNÎncă nu există evaluări
- Nov Dec 2014Document4 paginiNov Dec 2014ABC CheckÎncă nu există evaluări
- 07a80202 AdvancedcontrolsystemsDocument7 pagini07a80202 AdvancedcontrolsystemsSharanya ThirichinapalliÎncă nu există evaluări
- r05220403 Switching Theory and Logic DesignDocument8 paginir05220403 Switching Theory and Logic DesignSRINIVASA RAO GANTAÎncă nu există evaluări
- r05411005 Digital Control SystemsDocument7 paginir05411005 Digital Control SystemsSRINIVASA RAO GANTAÎncă nu există evaluări
- LDSADocument11 paginiLDSAVijay KrishnaÎncă nu există evaluări
- II B. Tech II Semester II B. Tech II Semester Regular Examinations August - 2014 Control Systems 2014Document8 paginiII B. Tech II Semester II B. Tech II Semester Regular Examinations August - 2014 Control Systems 2014Sandeep YandamuriÎncă nu există evaluări
- (4758) - 554 T.E. (Electrical) Control System - I (2012 Course) (Semester - II) (303147) (End - Semester)Document3 pagini(4758) - 554 T.E. (Electrical) Control System - I (2012 Course) (Semester - II) (303147) (End - Semester)Shubham KaklijÎncă nu există evaluări
- Ee2253 - Control Systems April-May 2010Document3 paginiEe2253 - Control Systems April-May 2010durgabalÎncă nu există evaluări
- 21 - 2010 - Nov - R09 - STLDDocument8 pagini21 - 2010 - Nov - R09 - STLDvasuvlsiÎncă nu există evaluări
- Set No. 1: Digital Control Systems RT42021Document8 paginiSet No. 1: Digital Control Systems RT42021Akhil ChinnaÎncă nu există evaluări
- AE61Document4 paginiAE61Anima SenÎncă nu există evaluări
- Jntu World: R05 Set No. 2Document8 paginiJntu World: R05 Set No. 2Samiullah MohammedÎncă nu există evaluări
- BDA 30703 Sem 1 1213 PDFDocument7 paginiBDA 30703 Sem 1 1213 PDFJevine LaiÎncă nu există evaluări
- Analog Automation and Digital Feedback Control TechniquesDe la EverandAnalog Automation and Digital Feedback Control TechniquesÎncă nu există evaluări
- Mathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsDe la EverandMathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsRoderick MelnikÎncă nu există evaluări
- Digital Electronics 2: Sequential and Arithmetic Logic CircuitsDe la EverandDigital Electronics 2: Sequential and Arithmetic Logic CircuitsEvaluare: 5 din 5 stele5/5 (1)
- Advanced Techniques and Technology of Computer-Aided Feedback ControlDe la EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlÎncă nu există evaluări
- Robust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationDe la EverandRobust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationÎncă nu există evaluări
- GARCH Models: Structure, Statistical Inference and Financial ApplicationsDe la EverandGARCH Models: Structure, Statistical Inference and Financial ApplicationsEvaluare: 5 din 5 stele5/5 (1)
- Analytical Modeling of Wireless Communication SystemsDe la EverandAnalytical Modeling of Wireless Communication SystemsÎncă nu există evaluări
- Programmable Logic Controllers: A Practical Approach to IEC 61131-3 using CoDeSysDe la EverandProgrammable Logic Controllers: A Practical Approach to IEC 61131-3 using CoDeSysÎncă nu există evaluări
- 15 6Document6 pagini15 6chenumallaÎncă nu există evaluări
- Problem Definition: Chapter 4: Linear Programming Applications A Product Mix ExampleDocument10 paginiProblem Definition: Chapter 4: Linear Programming Applications A Product Mix ExamplechenumallaÎncă nu există evaluări
- The Revised Simplex Method: Javier Larrosa Albert Oliveras Enric Rodr Iguez-CarbonellDocument34 paginiThe Revised Simplex Method: Javier Larrosa Albert Oliveras Enric Rodr Iguez-CarbonellShrey AgarwalÎncă nu există evaluări
- Readme!!Document1 paginăReadme!!chenumallaÎncă nu există evaluări
- 1vol3 Tema BorleaDocument7 pagini1vol3 Tema BorleaFuleki EdyÎncă nu există evaluări
- Effects of Street Focus in VastuDocument76 paginiEffects of Street Focus in VastuchenumallaÎncă nu există evaluări
- Equilibria in Fuel Cell Gases: K. Sasaki and Y. TeraokaDocument1 paginăEquilibria in Fuel Cell Gases: K. Sasaki and Y. TeraokachenumallaÎncă nu există evaluări
- HTTP WWW - UniversalteacherpublicationsDocument4 paginiHTTP WWW - UniversalteacherpublicationschenumallaÎncă nu există evaluări
- I J Ste 8661146083400Document9 paginiI J Ste 8661146083400ahmadfoxÎncă nu există evaluări
- Awareness Is Something That Is Very ImportantDocument5 paginiAwareness Is Something That Is Very ImportantchenumallaÎncă nu există evaluări
- Quotes For TeachersDocument38 paginiQuotes For TeacherschenumallaÎncă nu există evaluări
- A. Powell Davies: "Proper Planning Prevents Poor Performance."Document34 paginiA. Powell Davies: "Proper Planning Prevents Poor Performance."chenumallaÎncă nu există evaluări
- 2005-07 Ranger 500 EFI 2X4 4X4 Service ManualDocument345 pagini2005-07 Ranger 500 EFI 2X4 4X4 Service ManualBrian Cook100% (5)
- WAXESDocument2 paginiWAXESPra YogaÎncă nu există evaluări
- V7.0 Function ListDocument48 paginiV7.0 Function ListInyectronix VyhÎncă nu există evaluări
- 01 40 00 - Quality RequirementsDocument27 pagini01 40 00 - Quality RequirementsshauhramÎncă nu există evaluări
- Check List For Chilled Water Secondary Pump: Sl. No Description RemarksDocument2 paginiCheck List For Chilled Water Secondary Pump: Sl. No Description Remarkssiruslara6491Încă nu există evaluări
- A35 Ostetricia Ginecologia PDFDocument8 paginiA35 Ostetricia Ginecologia PDFAarthiÎncă nu există evaluări
- Yousif Alotaibi 01 CVDocument3 paginiYousif Alotaibi 01 CVyousefx20Încă nu există evaluări
- Highway Engineering B 1Document8 paginiHighway Engineering B 1Angelica TolentinoÎncă nu există evaluări
- A Study of Chemical Structure of Soft and Hardwood andDocument7 paginiA Study of Chemical Structure of Soft and Hardwood andBruna BarraÎncă nu există evaluări
- FM Approvals CN 1613Document0 paginiFM Approvals CN 1613Marcelo PeixotoÎncă nu există evaluări
- 2013 OSPE Salary Survey PDFDocument20 pagini2013 OSPE Salary Survey PDFdarinscottjohnsonÎncă nu există evaluări
- Amadeus Web ServicesDocument2 paginiAmadeus Web ServicesBoris ChoiÎncă nu există evaluări
- Basic Engineering Circuit Analysis 8th Ed SolutionsDocument1.254 paginiBasic Engineering Circuit Analysis 8th Ed SolutionsAndrew David Bushner87% (188)
- Bearing Detail PDFDocument1.152 paginiBearing Detail PDFJayesh MachhiÎncă nu există evaluări
- Types of Processors and RAM'sDocument26 paginiTypes of Processors and RAM'sSneha NairÎncă nu există evaluări
- TCRT5000 PDFDocument9 paginiTCRT5000 PDFmazhar940Încă nu există evaluări
- Investigating The Effect of Liquid Viscosity On Two Phase Gas Liquid FlowDocument252 paginiInvestigating The Effect of Liquid Viscosity On Two Phase Gas Liquid FlowAnonymous DMh6pdl0aÎncă nu există evaluări
- 312 Excavators Hydraulic System: Component ListDocument2 pagini312 Excavators Hydraulic System: Component ListRr hardiyantoÎncă nu există evaluări
- Potsdam Village Police Dept. Blotter April 12, 2018Document2 paginiPotsdam Village Police Dept. Blotter April 12, 2018NewzjunkyÎncă nu există evaluări
- SAES-A-102 Ambient Air Quality and Source Emissions StandardsDocument21 paginiSAES-A-102 Ambient Air Quality and Source Emissions StandardsFlorante NoblezaÎncă nu există evaluări
- BSM BWMP - D1 and D2Document34 paginiBSM BWMP - D1 and D2Adnan DjamalÎncă nu există evaluări
- Odi2-065r16m18s02-Q DS 0-0-0Document3 paginiOdi2-065r16m18s02-Q DS 0-0-0leolima trustitÎncă nu există evaluări
- Ultrasonic Atomizing Nozzle SystemsDocument40 paginiUltrasonic Atomizing Nozzle SystemsAnonymous H8hysGxA100% (1)
- 000-Za-E-M09403 - C-MS For Cable Tray InstallationDocument15 pagini000-Za-E-M09403 - C-MS For Cable Tray Installationsyam prasad100% (1)
- INSPECTION-REPORT-OF-RIVER-CHANNEL-IN-BRGY Ponong in Magarao, Camarines SurDocument3 paginiINSPECTION-REPORT-OF-RIVER-CHANNEL-IN-BRGY Ponong in Magarao, Camarines SurBerp OnrubiaÎncă nu există evaluări
- Rossler Chaotic Circuit and It's Application For Communication SecureDocument10 paginiRossler Chaotic Circuit and It's Application For Communication SecureMada Sanjaya WsÎncă nu există evaluări
- 09 Technical TablesDocument8 pagini09 Technical TablesRuban Vijaya SinghÎncă nu există evaluări
- Sandvik: 11/2019 PME F Additional Comments For Hydrabolt Option & HH200Document1 paginăSandvik: 11/2019 PME F Additional Comments For Hydrabolt Option & HH200Elber Luis Chavez BarriosÎncă nu există evaluări
- Guide To Using In-Situ Tensile Pull-Off Tests To Evaluate Bond of Concrete Surface MaterialsDocument12 paginiGuide To Using In-Situ Tensile Pull-Off Tests To Evaluate Bond of Concrete Surface MaterialsMauricio Javier León TejadaÎncă nu există evaluări
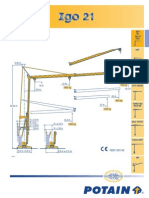
- Potain Igo 21 PDFDocument4 paginiPotain Igo 21 PDFMarco CruzÎncă nu există evaluări