Documente Academic
Documente Profesional
Documente Cultură
Sistemas Roboticos Teleoperados
Încărcat de
Marco VelaTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Sistemas Roboticos Teleoperados
Încărcat de
Marco VelaDrepturi de autor:
Formate disponibile
ESCUELA SUPERIOR POLITECNICA DE CHIMBORAZO
UNIDAD DE NIVELACION
CICLO DE NIVELACIN: SEPTIEMBRE 2013 / FEBRERO 2014
MDULO DE LGICAS DEL PENSAMIENTO: INTRODUCCIN A LA COMUNICACIN CIENTFICA
DATOS INFORMATIVOS - NOMBRES Y APELLIDOS: - DIRECCIN DOMICILIARIA: - TELFONO: - MAIL: - FECHA: MARCO VINICIO VELA ISA Av. Cordovz y Silvio Haro 2376256 marckov95@gmail.com Septiembre 2013 / Febrero 2014
Riobamba - Ecuador
Ciencia e Ingeniera Neogranadina
Universidad Militar Nueva Granada
revistaing@.umng.edu.co
ISSN (Versin impresa): 0124-8170 ISSN (Versin en lnea): 1909-77350 COLOMBIA
2005 Alexander Ceron Correa SISTEMAS ROBOTICOS TELEOPERADOS Ciencia e Ingeniera Neogranadina, noviembre, nmero 015 Universidad Militar Nueva Granada Bogot, Colombia pp. 62-69
Red de Revistas Cientficas de Amrica Latina y el Caribe, Espaa y Portugal Universidad Autnoma del Estado de Mxico
http://redalyc.uaemex.mx
Ciencia e Ingeniera Neogranadina
No 15
62-72
SISTEMAS ROBOTICOS TELEOPERADOS
Teleoperated Robotics Systems Alexander Cern Correa* Facultad de Ingeniera Universidad Militar Nueva Granada, Bogot D.C Colombia
RESUMEN En el presente artculo se realiza una revisin general sobre los sistemas robticos teleoperados, su estructura, componentes principales, clasificacin, tipos de sensores, sistemas de locomocin y aplicaciones; como ejemplo se mencionan algunos trabajos realizados Colombia y en el mundo. Palabras Claves- Robot, mvil, teleoperacin, visin remota, telepresencia.
pesar de no ser autnomos en s mismos [6][10]. Los robots teleoperados son aquellos controlados por un usuario a distancia desde una estacin remota. Dada su gran utilidad, se han empleado en diversos campos. Este tipo de manejo supone una ventaja desde el punto de vista de la proteccin y seguridad del usuario, ya que en caso de realizar trabajos en ambientes inseguros o inestables o con sustancias potencialmente peligrosas, como qumicos o explosivos, no se arriesga su integridad fsica [7][15]. En el desarrollo de robots teleoperados se involucra la electrnica, las comunicaciones, el control, la inteligencia artificial (IA) y la visin por computador.
ABSTRACT This paper describes a review of teleoperated robotic systems, structure, principal components, classification, sensors, locomotion systems and applications; also are mentioned several developments in Colombia and the world Keywords- Robot, mobile, teleoperation, remote vision, telepresence.
El uso de IA se puede apreciar en las decisiones que debe tomar el robot por ejemplo: evitar obstculos al ir de un sitio a otro, eligiendo el camino mas corto o cuando I. INTRODUCCIN se le ensea a reaccionar frente a ciertos estmulos y responde acertadamente a Existen muchas circunstancias en las cuales estmulos nuevos como en el caso de las no es conveniente emplear personas para la redes neuronales. La visin por computador realizacin de algunas labores debido al alto es utilizada cuando las tareas del robot riesgo a que ellos se exponen; por esta razn involucran el procesamiento de imgenes se han desarrollado diversas herramientas o provenientes de cmaras de video que pueden equipos que permiten reemplazar al hombre al estar ubicada en el mismo. Tanto la IA como realizar estas operaciones a distancia. Dentro la visin por computador pueden simplificar de estos equipos se encuentran los mviles significativamente el trabajo del operador. teleoperados tambin conocidos como robots a
*
Autor Corresponsal . aceronc@umng.edu.co. Profesor Auxiliar. Ingeniero de Sistemas.
Cern Correa A.
Noviembre de 2005
62
Ciencia e Ingeniera Neogranadina
No 15
62-72
II. COMPONENTES DE UN SISTEMA TELEOPERADO
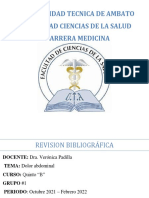
Un sistema teleoperado se compone principalmente de una estacin de teleoperacin, un sistema de comunicacin y esclavo, el esclavo puede ser un manipulador o un robot mvil equipado con un manipulador ubicado en un entorno remoto como el robot Andros Wolverine de la empresa Remotec que se ilustra en la figura 1. La estacin de teleoperacin permite controlar al esclavo a distancia por medio del sistema de comunicacin, el cual permite transmitir las seales de control hacia el esclavo y, a su vez, recibir seales de informacin sobre el estado de ste en la estacin de teleoperacin a travs de un canal de comunicacin que puede ser una red de computadores, un enlace de El esclavo se encuentra en un entorno remoto radio frecuencia o microondas. y se controla a distancia desde una estacin de teleoperacin. La persona que lo controla obtiene informacin del ambiente en el que se encuentra el robot, esta informacin es obtenida mediante sensores, permitiendo al usuario interactuar con el medio ambiente a distancia dando la sensacin de estar fsicamente en otro lugar (telepresencia) [6][10].
( a) (b) Figura 1. Componentes de un sistema teleoperado (a) Estacin de teleoperacin, (b) Robot (esclavo), adaptado de [1]
es decir informacin que es necesario procesar bajo ciertas restricciones de tiempo para tomar alguna accin. Para obtener esta informacin los robots mviles estn provistos de una gran cantidad de sensores los cuales se encargan de detectar magnitudes fsicas, estos pueden ser de proximidad, posicin, inclinacin y posiblemente de cmaras de video, por tal razn en la construccin del software se debe tener en cuenta la optimizacin del tiempo en cada tarea. Adems la interfaz hombre mquina debe estar diseada de tal manera que la informacin sea presentada adecuadamente de tal manera que se facilite tanto la ubicacin espacial como el acceso del usuario a la informacin esencial para as evitar cuellos de botella [13].
III.FUNCIONAMIENTO DEL ROBOT
El robot (esclavo) esta controlado por medio de un programa interno con el objeto de realizar tareas propias y tener mayor autonoma. Este Una estacin de teleoperacin puede estar programa esta ubicado en la memoria de un compuesta por un computador y, en este caso, sistema de procesamiento de datos sea ste se utilizan los dispositivos de entrada y de un computador, un DSP (procesador digital de salida para interactuar a distancia. Los seales), un microprocesador o un dispositivos de entrada pueden ser el teclado y microcontrolador. Los microcontroladores son una palanca de control y los de salida, pueden pequeos computadores provistos de diversas ser un monitor y los parlantes. El software que prestaciones, existe una gran gama lo cual se encuentra en el computador tiene una permite adaptarlos en diferentes aplicaciones, interfaz grfica de usuario que permite donde su utilizacin da lugar a estructuras interactuar con el robot a distancia. El esclavo altamente funcionales. es el dispositivo controlado a distancia, puede ser un mvil, un robot o un brazo mecnico. [7][14][15]. Una interfaz para teleoperacin de robots mviles maneja bastante informacin en tiempo real, A. Tipos de locomocin Los robots diversos pueden desplazarse por medio de diversos sistemas de locomocin como ruedas, orugas, patas o locomocin
Cern Correa A.
Noviembre de 2005
63
Ciencia e Ingeniera Neogranadina
de los anteriores configuraciones como: bajo diferentes
No 15
62-72
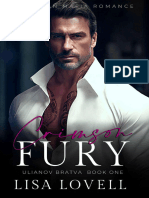
Ackerman: Similar al sistema de direccin de cualquier automvil de cuatro ruedas. Normalmente los vehculos robticos desarrollados con esta configuracin resultan (a) (b) de la modificacin o adaptacin de vehculos Figura 2. Robots con sistemas de locomocin por patas convencionales [14].
(a) Hexpodo (b) Cuadrpedo.
Triciclo clsico : Esta compuesto de tres ruedas, la delantera sirve para proveer traccin y direccin, el eje trasero tiene acopladas dos ruedas paralelas que se mueven libremente. Tiene problemas de estabilidad en terrenos difciles debido a que tiene pocos puntos de apoyo [14]. Pistas de deslizamiento: Son vehculos tipo oruga en los que tanto la traccin como el direccionamiento se consigue mediante bandas de traccin o pistas de deslizamiento este tiene desventajas como una reduccin de velocidad en comparacin al uso de ruedas y un gasto mayor de energa ya que en la rotacin existe mucho rozamiento entre el suelo y las pistas de deslizamiento una solucin a este problema es buscar que el polgono de sustentacin sea lo mas pequeo posible procurando no perder estabilidad [14]. Un ejemplo de este tipo de configuracin es el robot RMTO I que se puede observar en la figura 5 o el Detek, del cual se va a hablar mas adelante. Locomocin mediante patas: Tienen la ventaja de permitir locomocin en terrenos difciles evitar obstculos y omnidireccionalidad, pero su desventaja es requerir un consumo de energa mayor que con ruedas. Adems que el problema de planificacin y control es mas complejo que un robot de ruedas u orugas [16][18]. En la figura 2 se muestra un robot hexpodo [16], y un cuadrpedo [18].
Tambin existen otros tipos de configuraciones como por ejemplo el uso ruedas omnidireccionales o la mezcla de patas con ruedas como el caso del Sojourner Rover (figura 4). Estas configuraciones tienen la intencin de explorar diferentes clases de terrenos y proveer mayor funcionalidad. La eleccin de una configuracin especfica depende de caractersticas del proyecto a realizar tales como el tipo de terreno, la velocidad y el nivel de obstculos que se encuentren. B. Sensores para robots mviles Los robots deben estar provistos de diversos tipos de sensores los cuales cumplen tareas como la deteccin de proximidad de obstculos y medicin de posicin, velocidad, aceleracin e inclinacin. Para la deteccin de obstculos se usan principalmente foto celdas, fotodiodos, sensores de ultrasonido, sensores infrarrojos y cmaras [1][2][13]. Cuando se requiere la medicin de posicin y velocidad son usados los encoders (codificadores) los cuales estn compuestos de un par fotodiodo y fotocelda que permiten registrar posicin y velocidad de partes mviles a los cuales se le acopla un disco [6][13]. La realimentacin de fuerzas es una tcnica til para el control de manipuladores y robots mviles, ya que la informacin proveniente de los sensores puede ser convertida en fuerzas aplicadas en los dispositivos de manipulacin de la interfaz de teleoperacin es decir el usuario puede sentir las colisiones que se presenten en el manejo del robot [20]. Para
Cern Correa A.
Noviembre de 2005
64
Ciencia e Ingeniera Neogranadina
No 15
62-72
esto existen sensores de fuerza y presin de que se presenten en el camino ya sea a causa tipo piezo-electrico, resistores de fuerzade demora en las comunicaciones o por el sensado o medidores de fuerza [13]. hecho de estar realizando otras al tiempo. C. Visin Dentro de los sensores que pueden colocarse en un robot mvil se encuentran las cmaras de video, las cuales adems de permitir el control a distancia (visin remota) tambin sirven como fuente de informacin para la toma de decisiones automticas, esto se realiza por medio de procesamiento de imgenes. Las operaciones principales que realiza un sistema de procesamiento de imgenes para proveer mecanismos de visin a un robot mvil son: el promediado, la segmentacin de bordes, el anlisis de regiones y la deteccin de formas [13]. IV. CLASIFICACIN Y ALGUNOS DESARROLLOS
La robtica ha evolucionado con rapidez y se han desarrollado diversos tipos de robots mviles. Algunos de ellos han sido robots teleoperados y otros robots dotados de cierto grado de autonoma. Los robots teleoperados pueden clasificarse de la siguiente manera: D. Vehculos terrestres no tripulados Los vehculos terrestres no tripulados se emplean principalmente en operaciones militares de reconocimiento de terreno e incursin en zonas peligrosas. El desarrollo de estos proyectos comnmente es financiado por en el departamento de defensa de los pases desarrollados.
En sistemas ms sofisticados se hace uso sistemas de visin estereoscpica ubicados el robot y cascos de realidad virtual para el operador, en los cuales graficas por computador se combinan con las imgenes Un ejemplo, es el vehculo teleoperado USMC provenientes de las cmaras el resultado es (US Marine Corp) desarrollado por la visualizada en un monitor o en el casco, lo cual compaa Spawar Systems Center (SSC) de se conoce como realidad aumentada [11][5]. San Diego como parte del programa Ground Air TeleRobotic Systems (GATERS) bajo la E. Inteligencia Artificial direccin de la Unmanned Ground Vehicle Joint Program Office (UGV/JPO) ver figura 3. Dentro del sistema de procesamiento de datos Compuesto principalmente de tres mdulos: pueden existir algoritmos que permitan movilidad, vigilancia y armas y provisto de simplificar el trabajo del operador, estos cmaras de video y micrfonos para lograr pueden ser algoritmos de planeacin de telepresencia [7][15][26]. trayectorias con el objeto de que el robot realice tareas simples como ir de una posicin (xi , yi ) a otra (x f , y f ) evitando obstculos utilizando la informacin de los sensores, y la de posicin que puede ser obtenida mediante el uso de brjulas electrnicas, triangulacin con sensores infrarrojos o un GPS. Existen mtodos para hacer la evasin de obstculos en tiempo real como por ejemplo el campo de fuerza virtual y el histograma de vector de campo [3], otra ventaja del uso de la IA es dotar al robot de mayor autonoma, ya que es posible que el usuario no tenga el Figura 3. Vehculo teleoperado USMC tiempo suficiente, para evitar los obstculos
Cern Correa A.
Noviembre de 2005
65
Ciencia e Ingeniera Neogranadina
No 15
62-72
A. Robots teleoperados de pequea escala Este tipo de robot constituye un resultado de investigaciones realizadas en universidades y centros de investigacin y desarrollo. Los robots teleoperados de pequea escala se las desarrollan con propsitos cientficos, es el caso de los robots enviados en misiones espaciales, como el Sojourner Rover ver figura 4. El Sojourner Rover es un pequeo vehculo robotizado de seis ruedas, construido por el Jet Propulsion Laboratory de la NASA, diseado para ser enviado a Marte dentro del Pathfinder, con capacidad de transmitir imgenes y realizar experimentos en el suelo Marte. El sistema de alimentacin del Rover est compuesto de un arreglo de paneles solares, bateras y una electrnica de potencia para su adecuado manejo y distribucin, cuenta con la capacidad de moverse en terrenos difciles y rocosos, ya que posee seis ruedas dotadas de 3 grados de libertad que le permiten adaptarse a terrenos difciles [23].
alta definicin, Por tal razn deben tener un alto grado de precisin en el control de manipuladores, tambin estar dotados de mecanismos de locomocin que permitan afrontar diferentes tipos de terrenos. Estos robots son empleados por la polica o empresas de seguridad en situaciones en las que se desconfa de paquetes y en la inspeccin de vehculos sospechosos. El Wolverine es un modelo fabricado por Sandia National Laboratories en colaboracin con la empresa Remotec, al que se le introdujo un software especializado desarrollado por Sandia llamado SMART (Sandia Modular Architecture for Robotics and Teleoperation). El programa automatiza muchos de los de movimientos del robot, dejando al operador el control del "comportamiento" de la mquina [1]. V. APLICACIONES Los robots teleoperados pueden encontrarse en la industria nuclear (mantenimiento de reactores), qumica (manejo a distancia de sustancias peligrosas o txicas), militar (deteccin, manipulacin y desmantelamiento de cargas explosivas), desminado humanitario, espacial (exploraciones realizadas en la luna y en marte, tambin en transbordadores espaciales), minera (excavaciones, manejo de cargas explosivas en minas y tneles), en el sector de seguridad, mantenimiento y rescate (inspeccin de sistemas de alcantarillado y tuberas, reconocimiento de zonas de desastres), teleciruga , entre muchas otras reas [5][7][11][12]. VI. ALGUNOS ROBOTS DESARROLLADOS EN COLOMBIA
Figura 4. Robot Sojourner Rover
B. Robots de uso policial para desactivacin de bombas Los robots teleoperados que se emplean para la manipulacin y desactivacin de bombas estn provistos, en su mayora, de manipuladores y de una o ms cmaras de
En nuestro pas existen varios grupos de investigacin dedicados al desarrollo de robots mviles, manipuladores industriales y sistemas inteligentes dentro de los cuales se pueden encontrar los siguientes robots teleoperados, puede que no sean los nicos que se han desarrollado en el pas, pero son un claro
Cern Correa A.
Noviembre de 2005
66
Ciencia e Ingeniera Neogranadina
No 15
62-72
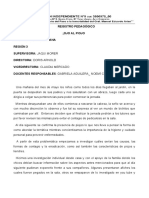
ejemplo del avance colombiano en el campo de la robtica. A. RMTO I En la Universidad Nacional se tiene cuenta del desarrollo del robot mvil teleoperado I (RMTO I), mostrado en la figura 5 [4].
Figura 6. Software para la estacin de teleoperacin del RMTO I
Lo novedoso de este robot es la utilizacin de visin remota, ya que no se tiene cuenta de trabajos anteriores en Colombia que la incorporen en la estacin de teleoperacin. B. DETEK, URSULA y R.E.T.O. Detek es un robot de exploracin de ambientes exteriores para la deteccin de objetos metlicos. Este robot fue desarrollado en la Universidad Javeriana, esta provisto de pistas de deslizamiento y un detector de metales, se ubica por medio de triangulacin con sensores infrarrojos [22]. El Ursula tambin desarrollado en la Universidad Javeriana, utiliza un sistema de locomocin compuesto de 6 ruedas, un detector de metales, esta provisto de una interfaz de teleoperacin que permite observar la informacin proveniente de los sensores, excepto el de la cmara de video [19]. Estos robots han sido desarrollados para atacar el problema del desminado humanitario pero tienen la desventaja de no ser aplicables en terrenos como el colombiano ya que la ubicacin de minas puede ser inaccesible para el robot y existen muchos tipos de terrenos en los cuales un robot de estas caractersticas no puede navegar. Es posible mejorar navegacin en algunos terrenos no estructurados, mediante el uso de un sistema de locomocin compuesto por ruedas y patas como el que puede observarse en el robot mvil para navegacin autnoma en terrenos poco estructurados (R.E.T.O.)
Figura 5. Robot mvil teleoperado I
Este robot es controlado a distancia desde una estacin de teleoperacin mediante un enlace de radio frecuencia, la imagen proveniente de una cmara ubicada en el robot es transmitida de manera inalmbrica a la estacin de teleoperacin. En la estacin de teleoperacin se encuentra un software desarrollado en lenguaje C++ que permite observar la visin del robot y enviar comandos al robot. La interfaz grfica del software desarrollada para el manejo del robot est compuesta de dos ventanas, una para el despliegue del video proveniente de la cmara del robot y la otra para seleccionar los comandos de control. Una caracterstica importante de este software es permitir el manejo del mvil usando una palanca de juegos (joystick o gamepad), el ratn o el teclado, en la figura 6 se puede observar la interfaz grfica de usuario del mismo:
Cern Correa A.
Noviembre de 2005
67
Ciencia e Ingeniera Neogranadina
desarrollado en la Universidad Militar "Nueva Granada", este robot esta compuesto de ruedas provistas de traccin independiente y articulaciones que permiten modificar la altura de las ruedas para evadir algunos tipos de obstculos [9]. Otra alternativa es el uso robots podos (tambin conocidos como snake robots, robots hiper-redundantes o robots fuertemente articulados) en los cuales el sistema de locomocin imita el movimiento de una serpiente estos se componen de mltiples articulaciones, esta alternativa se encuentra en desarrollo [8]. VII. CONCLUSIONES La eleccin de una configuracin de locomocin especfica depende de caractersticas del proyecto a realizar tales como el tipo de terreno y la velocidad requerida.
No 15
62-72
Los sensores utilizados en un robot mvil dependen del tipo de obstculos que se encuentren y las caractersticas del entorno donde se desplace el mismo. En el caso colombiano, el desarrollo de esta clase de tecnologa es muy importante, ya que existen muchas circunstancias en las cuales se emplean operarios para realizar diversas tareas de alto riesgo, como la explotacin minera, la industria qumica, la deteccin, manipulacin, eliminacin de cargas explosivas y desminado humanitario. Por tal razn es de gran inters la investigacin y el desarrollo tecnolgico en la ingeniera actual. REFERENCIAS [1] Bennet, P. C. -SAND REPORT "Robotic Mobile Manipulation Experiments at the U.S. Army Maneuver Support Center" SANDIA NATIONAL LABORATORIES, Junio 2002.
[2] Borenstein J. Real-time Obstacle Avoidance for Fast Mobile Robots. IEEE. Transactions on Systems, Man, and Cybernetics, Vol. 19, No. 5, Sept./Oct. 1989, pp. 1179-1187. [3] Borenstein J. The vector field histogram Fast obstacle avoidance for mobile robots. IEEE Journal of Robotics and Automation Vol 7, No 3, June 1991, pp. 278-288. [4] Cern A. Desarrollo de un Robot Mvil teleoperado. IEEE Colombian Workshop on Robotics and Automation 2005. [5] Chesney R. Augmented Tele - Operation Presented at the IARP Workshop on Humanitarian Demining (HUDEM '02), International Advanced Robotics Program, Vienna, Austria, 3-5 November 2002. [6] Everet H. R. Sensor for Mobile Robots Theory and Application, A. K. Peters Ltd. Wellesley, Massachusetts. 1995. [7] Fernndez J. A. Manipulador virtual teleoperado, Instituto Militar de Ingeniera, Ro de Janeiro, 2002. [8] Gonzlez-Gmez, J, Aguayo E. and Boemo E.,"Locomotion of a Modular Worm-like Robot using a FPGA-based embedded MicroBlaze Soft-processor", 7th International Conference on Climbing and Walking Robots, CLAWAR. 2004. [9] Guerra R., A. Londoo. Diseo, simulacin y construccin de un robot mvil para navegacin autnoma en terrenos poco estructurados (R.E.T.O.). Universidad Militar Nueva Granada 2004. [10] Jones J. Mobile Robots, Inspiration to Implementation. A. K. Peters Ltd. Wellesley, Massachusetts.1993. [11] Lawson S. W. Augmented reality for underground pipe inspection and maintenance. SPIE. 1998. [12] Mcfee J.E., V. Aitken, R.Chesney, Y.Das and K. Russell. "A multisensor, vehicle mounted, teleoperated mine detector with data fusion" Proc. SPIE Conference on Detection and Remediation Technologies for Mines and Mine-like Targets III. Vol.3392, Orlando, FL, USA, 13-17 April, 1998.
Cern Correa A.
Noviembre de 2005
68
Ciencia e Ingeniera Neogranadina
No 15
62-72
[13] Niku S. Introduction to Robotics, Analysis, Systems, Applications. Prentice Hall. 2001. [14] Olivares R, C. Zhou, J. Adams, and B. Bodenheimer. Interface Evaluation for Mobile Robot Teleoperation, Proceedings of the ACM Southeast Conference (ACMSE03), pp. 112-118, Savannah, GA, March 2003. [15] Ollero A. Robtica manipuladores y robots mviles. Alfaomega. 2001. [16] Prez A. Diseo y construccin de un robot mvil hexpodo, Universidad de los Andes. 2003. [17] Reinoso O. Sistemas automticos y de aprendizaje e arquitecturas de control para teleoperacin, Universidad Miguel Hernndez, Espaa. [18] Reyes C. Diseo y construccin de un prototipo de robot caminador cuadrpedo Universidad Nacional. 2003. [19] Rizo, J.,y otros. URSULA: Robotic Demining System, ICAR, 2003. [20] Sangyoon Lee, Gaurav S. Sukhatme, Gerard Jounghyun Kim, Chan-Mo Park. Haptic Control of a Mobile Robot: A User Study. 2002. [21] Stone, H. W., Mars Pathfinder Microrover: A Low-Cost, Low-Power Spacecraft, Proceedings of the 1996 AIAA Forum on Advanced Developments in Space Robotics, Madison, WI, August 1996. [22] Suarez, J. y otros., Robot de Exploracin de Ambientes Exteriores para la deteccin de objetos metlicos "DeteK", 2002. [23] http://mpfwww.jpl.nasa.gov/MPF/rover/soj ourner.html [24] http://www.geocities.com/alexanderceron [25] http://www.globalsecurity.org/military/syst ems/ground/ugv.htm [26] http://www.spawar.navy.mil/robots/land/to v/tov.html
Cern Correa A.
Noviembre de 2005
69
SNTESIS, Tema: Sistemas Robticos Teleoperados
Existen muchas circunstancias en las cuales no es conveniente emplear personas para algunas labores debido a su alto riesgo, por esta razn se han desarrollado diversas herramientas o equipos que permiten reemplazarlo. Dentro de estos se encuentra los mviles Teleoperados tambin conocidos como robots, son aquellos controlados por un usuario a distancia desde una estacin remota en diversos mbitos. Tanto la IA (inteligencia artificial) como la visin por computador pueden simplificar significativamente el trabajo del operador.
Los componentes de un sistema Teleoperado principalmente son; una estacin remota, un sistema de comunicacin y un esclavo o robot mvil. El sistema de comunicacin permite transmitir las seales de control hacia el esclavo, y a su vez recibir seales de informacin sobre el estado de ste, una estacin de teleoperacin puede estar compuesta por un computador, el software del mismo tiene una interfaz grfica de usuario que permite interactuar con el robot a distancia, el esclavo es el dispositivo controlado a distancia, puede ser mvil, un robot o un brazo mecnico, estos estn provistos de una gran cantidad de sensores los cuales se encargan de detectar magnitudes fsicas, proximidad, posicin, inclinacin, todo esto para optimizar el tiempo en cada tarea.
El robot, en su funcionamiento, est controlado por medio de un programa interno con el objeto de realizar tareas propias y tener mayor autonoma. Los robots mviles pueden desplazarse por medio de diversos sistemas de locomocin tales como ruedas, orugas, patas o una mezcla de los anteriores bajo diferentes configuraciones como: Ackerman, similar al sistema de direccin de cualquier automvil de cuatro ruedas, Triciclo clsico, compuesto de tres ruedas, la delantera sirve para proveer traccin y direccin, el eje trasero tiene acoplados dos ruedas paralelas que se mueven libremente, Pistas de deslizamiento, son vehculos tipo oruga en los que tanto la traccin como el direccionamiento se consigue mediante bandas de traccin o pistas de deslizamiento, Locomocin mediante patas, tienen la ventaja de permitir locomocin en terrenos difciles evitar obstculos y omnidireccionalidad, pero su desventaja es requerir un consumo de energa mayor que con ruedas. Estas configuraciones tienen la intencin de explorar diferentes clases de terrenos y proveer mayor funcionalidad. Inteligencia artificial, dentro de esta existen mtodos para hacer la evasin de obstculos en tiempo real como por ejemplo el campo de fuerza virtual y el histograma de vector de campo, otra ventaja del uso de la IA , es dotar al robot de mayor independencia.
La clasificacin de estos robots se da la siguiente manera, Vehculos terrestres no tripulados, se emplean en operaciones de reconocimiento de terreno e incursin en zonas peligrosas, Robots Teleoperados de pequea escala, se desarrollan con propsitos cientficos, es el caso de los robots enviados en misiones espaciales y los Robots de uso policial para desactivacin de bombas, son empleados por la polica en situaciones en las que se desconfe de paquetes y en la inspeccin de vehculos sospechosos.
Debido a la demanda por mejorar cada da ms e incursionar en todo mbito los robots Teleoperados pueden encontrarse en la industria nuclear, qumica, militar, desminado humanitario, espacial, minera, en el sector de seguridad, mantenimiento y rescate, teleciruga, entre muchas otras.
En Colombia varios grupos de investigacin dedicados al desarrollo de robots mviles, han creado algunos de estos que son: DETEK, es un robot de exploracin de ambientes exteriores para la deteccin de objetos metlicos, estas caractersticas son similares al de robot URSULA, R.E.T.O y RTM I, lo novedoso de este ltimo robot es la utilizacin de visin remota. Principalmente estos robots han sido creados para atacar el problema del desminado humanitario pero tienen la desventaja de no ser aplicables en terrenos como el colombiano ya que la ubicacin de minas puede ser inaccesible para el robot y existen muchos tipos de terrenos en los cuales un robot de estas caractersticas no puede navegar.
S-ar putea să vă placă și
- Arranque Motores SincronosDocument7 paginiArranque Motores SincronosTropa Fiee UncpÎncă nu există evaluări
- Estudio Ambiental, Social y Predial - Tomo 2 PDFDocument199 paginiEstudio Ambiental, Social y Predial - Tomo 2 PDFAldemir RojasÎncă nu există evaluări
- Códigos de LuzDocument11 paginiCódigos de LuzMORA HAMED100% (2)
- 6t°gerencia en EnfermeriaDocument63 pagini6t°gerencia en EnfermeriaAnonymous NaTJ5y1aÎncă nu există evaluări
- Tarea 2.1 MatricesDocument5 paginiTarea 2.1 MatricesEduard David Barrios Padilla50% (2)
- 11 Pt-Gsim-010 Protocolo para La Toma de Imagenes DiagnosticasDocument64 pagini11 Pt-Gsim-010 Protocolo para La Toma de Imagenes DiagnosticasGio CruzÎncă nu există evaluări
- Proyecto PosadaDocument115 paginiProyecto PosadaNorberto Jose Aguillòn67% (3)
- Ejercicio 4 - Capitulo 4 - FORMAS DE COHERENCIA TEXTUALDocument1 paginăEjercicio 4 - Capitulo 4 - FORMAS DE COHERENCIA TEXTUALMiguel PovedaÎncă nu există evaluări
- Tipologia de CuencasDocument49 paginiTipologia de CuencasEstefany M CHÎncă nu există evaluări
- Dolor Abdominal Grupon1 - Rotacion Dra. PadillaDocument40 paginiDolor Abdominal Grupon1 - Rotacion Dra. PadillaMichelle PalaguachiÎncă nu există evaluări
- Matrogimnasia en PreescolarDocument8 paginiMatrogimnasia en PreescolarRevati Ramana Dasa0% (1)
- Crimson FuryDocument216 paginiCrimson FuryLuisana SalasÎncă nu există evaluări
- Sistema Circulatorio ResumenDocument10 paginiSistema Circulatorio ResumenMartin RiosÎncă nu există evaluări
- Beneficios Despulpadoras y TrilladorasDocument8 paginiBeneficios Despulpadoras y TrilladorasJosué ArévaloÎncă nu există evaluări
- Control 1 Administracion de OperacionesDocument3 paginiControl 1 Administracion de OperacionesJaviera Romero0% (3)
- Apuntes Históricos - Primera Parte (Versión Corregida)Document48 paginiApuntes Históricos - Primera Parte (Versión Corregida)Pablo Martín AgüeroÎncă nu există evaluări
- Tendencias Estilísticas FundamentalesDocument5 paginiTendencias Estilísticas Fundamentalesanjoshenza100% (1)
- Texto Del Dilema - ConflictoDocument1 paginăTexto Del Dilema - ConflictoRoberto Carlos Chumacero SuncionÎncă nu există evaluări
- Carencias Nutricionales en Cítricos - Síntomas y CorrecciónDocument9 paginiCarencias Nutricionales en Cítricos - Síntomas y CorrecciónslugmotionÎncă nu există evaluări
- Fenomenos LuminososDocument2 paginiFenomenos Luminososjhonatan maldonado barreraÎncă nu există evaluări
- Relatoria Ojo Al Piojo (2424)Document4 paginiRelatoria Ojo Al Piojo (2424)Claudia Daniela MercadoÎncă nu există evaluări
- Casa Del Moral en ArequipaDocument6 paginiCasa Del Moral en ArequipaYuli Gabriela Choque PeñalozaÎncă nu există evaluări
- Guia 001 Segundo Periodo de EspañolDocument12 paginiGuia 001 Segundo Periodo de EspañolJuan David Gutierrez MorenoÎncă nu există evaluări
- Batch ProcessDocument14 paginiBatch ProcessMargaret Lissette MorenoÎncă nu există evaluări
- Lagunas - Milton LäuferDocument165 paginiLagunas - Milton LäuferAlfredo BalanescuÎncă nu există evaluări
- Guía 2 - Hobsbawm - Berman - MarxDocument2 paginiGuía 2 - Hobsbawm - Berman - MarxUlises VersilloÎncă nu există evaluări
- Marco Teorico UrgenteDocument2 paginiMarco Teorico UrgenteYenny MatiasÎncă nu există evaluări
- Ensayo Orlando Fals BordaDocument3 paginiEnsayo Orlando Fals BordaSebastian Bareño100% (2)
- Exp. 3 Tutoria 5° 2022 Act 2Document3 paginiExp. 3 Tutoria 5° 2022 Act 2Victor Hugo Vilca NeiraÎncă nu există evaluări
- Arte Y Geometría. Carl Andre: Dibujo Técnico. Grado en Bellas Artes Y Diseño Jorge VarasDocument11 paginiArte Y Geometría. Carl Andre: Dibujo Técnico. Grado en Bellas Artes Y Diseño Jorge VarasLuiiz C.A.Încă nu există evaluări