S-ar putea să vă placă și
- Flapping Wings With PVDF Sensors To Modify The Aerodynamic Forces of A Micro Aerial VehicleDocument9 paginiFlapping Wings With PVDF Sensors To Modify The Aerodynamic Forces of A Micro Aerial VehiclePrapto PraptÎncă nu există evaluări
- Ms 12 603 2021Document11 paginiMs 12 603 2021chandra sekharÎncă nu există evaluări
- A Compliant Polymorphing Wing For Small UAVsDocument14 paginiA Compliant Polymorphing Wing For Small UAVsmailtoj.ishaanÎncă nu există evaluări
- UA Micro Ornithopters Aerodynamic TestingDocument13 paginiUA Micro Ornithopters Aerodynamic TestingHao Yi OngÎncă nu există evaluări
- Ornithopter Flight Simulation Based On Flexible Multi-Body DynamicsDocument10 paginiOrnithopter Flight Simulation Based On Flexible Multi-Body DynamicsWl CsoÎncă nu există evaluări
- Ijertv6n5spl 01Document12 paginiIjertv6n5spl 01Mohammed SalamÎncă nu există evaluări
- Aerodynamics of Dynamic Wing Flexion in Translating Wings: Yun Liu Bo Cheng Sanjay P. Sane Xinyan DengDocument15 paginiAerodynamics of Dynamic Wing Flexion in Translating Wings: Yun Liu Bo Cheng Sanjay P. Sane Xinyan DengRAJARATNAÎncă nu există evaluări
- Nasa Wing ShapingDocument38 paginiNasa Wing ShapingBurak ÇınarÎncă nu există evaluări
- Morphing Nose Cone - 2Document10 paginiMorphing Nose Cone - 2Naufal PutraÎncă nu există evaluări
- 2010 AST Flapping Membrane WingDocument12 pagini2010 AST Flapping Membrane WingAakriti TripathiÎncă nu există evaluări
- Aerospace Science and Technology: Khanh Nguyen, Loan Thi Kim Au, Hoang-Vu Phan, Soo Hyung Park, Hoon Cheol ParkDocument13 paginiAerospace Science and Technology: Khanh Nguyen, Loan Thi Kim Au, Hoang-Vu Phan, Soo Hyung Park, Hoon Cheol ParkHosein PahlavanÎncă nu există evaluări
- Aerodynamic Characteristics of A Flexible Wing MAV: January 2012Document8 paginiAerodynamic Characteristics of A Flexible Wing MAV: January 2012Tan ZhenyangÎncă nu există evaluări
- (Nguyen)Document28 pagini(Nguyen)Sunil Mike VictorÎncă nu există evaluări
- Airfoil Selection Procedure, Wind Tunnel Experimentation and Implementation of 6DOF Modeling On A Flying Wing Micro Aerial VehicleDocument31 paginiAirfoil Selection Procedure, Wind Tunnel Experimentation and Implementation of 6DOF Modeling On A Flying Wing Micro Aerial VehicleMol MolÎncă nu există evaluări
- Liftoff of a 60mg Flapping-Wing MAVDocument6 paginiLiftoff of a 60mg Flapping-Wing MAVSaiprabhakar DevineniÎncă nu există evaluări
- Review of Morphing Aircraft Wings Using Smart MaterialsDocument56 paginiReview of Morphing Aircraft Wings Using Smart MaterialsAustin GopiÎncă nu există evaluări
- Gandhi 2008Document9 paginiGandhi 2008Paulina Marin TellezÎncă nu există evaluări
- Kinematic Analysis of Micro Air Vehicle Flapping Wing MechanismDocument5 paginiKinematic Analysis of Micro Air Vehicle Flapping Wing MechanismamirulÎncă nu există evaluări
- Flapping Wing MechanismDocument7 paginiFlapping Wing MechanismSiva BogaÎncă nu există evaluări
- Aeroelasticity ThesisDocument5 paginiAeroelasticity Thesisb0sus1hyjaf2100% (1)
- C C C C C C C C C CC CC CCC C CC C C CCC C C C C C C C !" C "#$ C&!"C&C #C&C!$!C$$C '$#C ("C$) $C C C C C C+"C,-.,C CDocument8 paginiC C C C C C C C C CC CC CCC C CC C C CCC C C C C C C C !" C "#$ C&!"C&C #C&C!$!C$$C '$#C ("C$) $C C C C C C+"C,-.,C CmilkllovinÎncă nu există evaluări
- FuselageDocument10 paginiFuselageSatriaÎncă nu există evaluări
- Aerospace Science and Technology: Joseph A. Schetz, Serhat Hosder, Vance Dippold III, Jessica WalkerDocument10 paginiAerospace Science and Technology: Joseph A. Schetz, Serhat Hosder, Vance Dippold III, Jessica WalkerEsteban ValenciaÎncă nu există evaluări
- Design and Aerodynamic Analysis of An Ornithopter Biswajit Swain 712me4096Document5 paginiDesign and Aerodynamic Analysis of An Ornithopter Biswajit Swain 712me4096Deb PradhanÎncă nu există evaluări
- Pteracam - The Scouting GuideDocument26 paginiPteracam - The Scouting GuideSharmatt GadekarÎncă nu există evaluări
- 1 s2.0 S1000936116300978 MainDocument19 pagini1 s2.0 S1000936116300978 MainSHARONÎncă nu există evaluări
- Article_Swarm of unmanned fightersDocument16 paginiArticle_Swarm of unmanned fightersVasyl LoginovÎncă nu există evaluări
- Review of Morphing Aircraft TechnologiesDocument55 paginiReview of Morphing Aircraft TechnologiesJack AzadÎncă nu există evaluări
- Lehmkuehler_AndersonDocument9 paginiLehmkuehler_Andersoneno emoÎncă nu există evaluări
- Bio-Inspired Design of Flapping-Wing Micro Air VehiclesDocument10 paginiBio-Inspired Design of Flapping-Wing Micro Air VehiclesBlejan DenisÎncă nu există evaluări
- Propulsion System For Twin Fuselage UAV-group6Document43 paginiPropulsion System For Twin Fuselage UAV-group6Noel SabuÎncă nu există evaluări
- Hermanto - OIC - MMIE 2022Document7 paginiHermanto - OIC - MMIE 2022Bung HaFiedÎncă nu există evaluări
- 2 D Flexible WingDocument14 pagini2 D Flexible WingMert BağrıyanıkÎncă nu există evaluări
- A Reconfigurable Wing For Biomimetic AircraftDocument12 paginiA Reconfigurable Wing For Biomimetic AircraftMoses DevaprasannaÎncă nu există evaluări
- Verma 2018 IOP Conf. Ser. Mater. Sci. Eng. 455 012005 PDFDocument10 paginiVerma 2018 IOP Conf. Ser. Mater. Sci. Eng. 455 012005 PDFdosabikÎncă nu există evaluări
- Chapter 3 - The Development of Morphing Aircraft Be - 2018 - Morphing Wing TechnDocument19 paginiChapter 3 - The Development of Morphing Aircraft Be - 2018 - Morphing Wing TechnRichardÎncă nu există evaluări
- A New Non Linear Vortex Lattice Method Applications - 2016 - Chinese Journal ofDocument18 paginiA New Non Linear Vortex Lattice Method Applications - 2016 - Chinese Journal ofLittledarkknightÎncă nu există evaluări
- composite actuatorShape memory alloy/glass fiber woven composite for soft morphing winglets of unmanned aerial vehiclesDocument11 paginicomposite actuatorShape memory alloy/glass fiber woven composite for soft morphing winglets of unmanned aerial vehiclesjohn mtzÎncă nu există evaluări
- Experimental Study On The Effect of Tubercle On Aerodynamic Characteristics of Swept Wings at Low Reynolds NumberDocument10 paginiExperimental Study On The Effect of Tubercle On Aerodynamic Characteristics of Swept Wings at Low Reynolds Numberelson.study.workÎncă nu există evaluări
- Bi Plane MAVDocument4 paginiBi Plane MAVYathishYmÎncă nu există evaluări
- Characterization of The Mechanics of Compliant Wing Designs For Flapping-Wing Miniature Air VehiclesDocument11 paginiCharacterization of The Mechanics of Compliant Wing Designs For Flapping-Wing Miniature Air VehiclesZahid Hameed QaziÎncă nu există evaluări
- Conceptual Simulator Implementation of Flapping Wing Micro Air Vehicle Using FLAMESDocument18 paginiConceptual Simulator Implementation of Flapping Wing Micro Air Vehicle Using FLAMESKrishna MyakalaÎncă nu există evaluări
- Effect of Exibility On Unsteady Aerodynamics Forces of A Purely Plunging AirfoilDocument14 paginiEffect of Exibility On Unsteady Aerodynamics Forces of A Purely Plunging AirfoilPhạm ThiênÎncă nu există evaluări
- Co-Flow Jet (CFJ) Airfoils Practicality in Engineless AirplanesDocument25 paginiCo-Flow Jet (CFJ) Airfoils Practicality in Engineless Airplanesinam vfÎncă nu există evaluări
- Reverse Engineering and Aerodynamic Analysis of A Flying Wing UAV ATSChandranDocument13 paginiReverse Engineering and Aerodynamic Analysis of A Flying Wing UAV ATSChandrancsulbstudent1Încă nu există evaluări
- Preliminary Design of A Small Unmanned Battery 3570581 - Peukert - VoltageDocument12 paginiPreliminary Design of A Small Unmanned Battery 3570581 - Peukert - Voltageumunera2997Încă nu există evaluări
- Design and Model Construction of A Flapping Wing UAV OrnithopterDocument6 paginiDesign and Model Construction of A Flapping Wing UAV OrnithopterPhạm Quốc BảoÎncă nu există evaluări
- Study On Thin Airfoil Theory Performance Test of EDocument10 paginiStudy On Thin Airfoil Theory Performance Test of ENguyen Danh HauÎncă nu există evaluări
- Punta de Ala 3 UavDocument18 paginiPunta de Ala 3 Uavdiego osorioÎncă nu există evaluări
- Biomimetics 07 00207Document17 paginiBiomimetics 07 00207MIGUEL ANGEL VICENTE CANAVIRIÎncă nu există evaluări
- Icmiee Pi 160138Document6 paginiIcmiee Pi 160138Rohit PoddarÎncă nu există evaluări
- Flexible Wing Based Micro Air VehiclesDocument13 paginiFlexible Wing Based Micro Air VehiclesArun NairÎncă nu există evaluări
- Aircraft Fuselage Recent Developments - A ReviewDocument9 paginiAircraft Fuselage Recent Developments - A ReviewPUNWESHÎncă nu există evaluări
- A Review of Design and Fabrication of The Bionic Flapping Wing Micro Air VehiclesDocument20 paginiA Review of Design and Fabrication of The Bionic Flapping Wing Micro Air VehiclesMohan S kumarÎncă nu există evaluări
- Experimental Investigation Oflift To Drag RatioDocument8 paginiExperimental Investigation Oflift To Drag RatioMd. Azimur RahmanÎncă nu există evaluări
- Rama Rao 2021 IOP Conf. Ser. Mater. Sci. Eng. 1168 012011Document12 paginiRama Rao 2021 IOP Conf. Ser. Mater. Sci. Eng. 1168 012011Şevki SağlamÎncă nu există evaluări
- Recent Developments in The Aeroelasticity of Morphing AircraftDocument94 paginiRecent Developments in The Aeroelasticity of Morphing Aircraftfelip987Încă nu există evaluări
- The Control of Flight Force by A Flapping Wing: Lift and Drag ProductionDocument21 paginiThe Control of Flight Force by A Flapping Wing: Lift and Drag ProductionRAJARATNAÎncă nu există evaluări
- Airfoils, Bernoulli and NewtonDocument4 paginiAirfoils, Bernoulli and NewtonedwardsilvaÎncă nu există evaluări
- Lecture Notes On Intermediate Fluid MechanicsDocument298 paginiLecture Notes On Intermediate Fluid MechanicsedwardsilvaÎncă nu există evaluări
- Calibration PDFDocument112 paginiCalibration PDFasjad rajaÎncă nu există evaluări
- Chapter 6 Stabilization of Scale Model Vertical Take-OffDocument21 paginiChapter 6 Stabilization of Scale Model Vertical Take-OffedwardsilvaÎncă nu există evaluări
- Concept of Lift and DragDocument7 paginiConcept of Lift and DraglarasmoyoÎncă nu există evaluări
- Altera DspbookDocument8 paginiAltera DspbookGopal Balakrishnan IyerÎncă nu există evaluări
- InTech-Advanced Uav Trajectory Generation Planning and GuidanceDocument29 paginiInTech-Advanced Uav Trajectory Generation Planning and GuidanceDaniel DupréÎncă nu există evaluări
- Chapter 1 Design and Development of A Fly-By-WirelessDocument13 paginiChapter 1 Design and Development of A Fly-By-WirelessedwardsilvaÎncă nu există evaluări
- Chapter 5 Modelling and Control PrototypingDocument25 paginiChapter 5 Modelling and Control PrototypingedwardsilvaÎncă nu există evaluări
- Chapter 1 Design and Development of A Fly-By-WirelessDocument13 paginiChapter 1 Design and Development of A Fly-By-WirelessedwardsilvaÎncă nu există evaluări
- Chapter 8 Fly-The-Camera PerspectiveDocument29 paginiChapter 8 Fly-The-Camera PerspectiveedwardsilvaÎncă nu există evaluări
- Chapter 8 Fly-The-Camera PerspectiveDocument29 paginiChapter 8 Fly-The-Camera PerspectiveedwardsilvaÎncă nu există evaluări
- Inverse Transpose Matrix CalculatorDocument6 paginiInverse Transpose Matrix CalculatoredwardsilvaÎncă nu există evaluări
- Inverse Transpose Matrix CalculatorDocument6 paginiInverse Transpose Matrix CalculatoredwardsilvaÎncă nu există evaluări
- Aircraft Hydraulic SystemsDocument23 paginiAircraft Hydraulic SystemsedwardsilvaÎncă nu există evaluări
- Take-Home Test 1: 6.243J (Fall 2003) : Dynamics of Nonlinear Systems by A. MegretskiDocument2 paginiTake-Home Test 1: 6.243J (Fall 2003) : Dynamics of Nonlinear Systems by A. MegretskiedwardsilvaÎncă nu există evaluări
- Constraints and Connections in AbaqusDocument28 paginiConstraints and Connections in AbaqusVenu Kishore83% (6)
- MatrizDocument1 paginăMatrizedwardsilvaÎncă nu există evaluări
- Complete Study Guide MIT FEM Prof BatheDocument194 paginiComplete Study Guide MIT FEM Prof BathekbdbmmÎncă nu există evaluări
- Air Compressor DownloadableDocument39 paginiAir Compressor DownloadableedwardsilvaÎncă nu există evaluări
- Project Management TemplatesDocument21 paginiProject Management TemplatesChandrashekar ShettyÎncă nu există evaluări
- Project Management TipsDocument10 paginiProject Management Tipstrisno100% (20)
- Six Sigma For System Innovation Dessign 1233779239181412 3Document39 paginiSix Sigma For System Innovation Dessign 1233779239181412 3edwardsilvaÎncă nu există evaluări
- Take-Home Test 1 Solutions: 6.243J (Fall 2003) : Dynamics of Nonlinear Systems by A. MegretskiDocument5 paginiTake-Home Test 1 Solutions: 6.243J (Fall 2003) : Dynamics of Nonlinear Systems by A. Megretskihulier2Încă nu există evaluări
- Inverse Transpose Matrix CalculatorDocument6 paginiInverse Transpose Matrix CalculatoredwardsilvaÎncă nu există evaluări
- Aerodynamics of Cars PDFDocument4 paginiAerodynamics of Cars PDFPrakhar AggarwalÎncă nu există evaluări
- Constraints and Connections in AbaqusDocument28 paginiConstraints and Connections in AbaqusVenu Kishore83% (6)
- 5 Steps To Risk AssessmentDocument8 pagini5 Steps To Risk AssessmentAnnie HawkinsÎncă nu există evaluări
- Take-Home Test 1 Solutions: 6.243J (Fall 2003) : Dynamics of Nonlinear Systems by A. MegretskiDocument5 paginiTake-Home Test 1 Solutions: 6.243J (Fall 2003) : Dynamics of Nonlinear Systems by A. Megretskihulier2Încă nu există evaluări
- Orange Book Management of RiskDocument52 paginiOrange Book Management of Riskklondike2517Încă nu există evaluări
- RPLL NewDocument74 paginiRPLL NewMeta learnÎncă nu există evaluări
- SECTION 1-01 Limitations: Airplane Operations ManualDocument45 paginiSECTION 1-01 Limitations: Airplane Operations ManualSinisaBanjac100% (4)
- Airfoil NACADocument277 paginiAirfoil NACAtaufikengineer100% (4)
- 1954 19Document258 pagini1954 19w824rg2Încă nu există evaluări
- Naca and The Naca6409Document1 paginăNaca and The Naca6409Kevin ChanÎncă nu există evaluări
- BD5 Build Instructions: FuselageDocument14 paginiBD5 Build Instructions: Fuselageandyroads2Încă nu există evaluări
- Razi Seminar Final PresentationDocument25 paginiRazi Seminar Final Presentationsidharth7manojÎncă nu există evaluări
- Cao 40 F2014L01177Document31 paginiCao 40 F2014L01177SerenaÎncă nu există evaluări
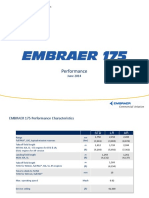
- E175 PerformanceDocument3 paginiE175 PerformanceMyo Myint AungÎncă nu există evaluări
- Englishforaviationmechanics 150826051105 Lva1 App6892 PDFDocument104 paginiEnglishforaviationmechanics 150826051105 Lva1 App6892 PDFThanh NguyenÎncă nu există evaluări
- Piper - Pa28r-200 Cherokee - Arrow - PohDocument171 paginiPiper - Pa28r-200 Cherokee - Arrow - PohMorten Hibbin100% (3)
- Falcon 7 XDocument4 paginiFalcon 7 XJefferson Vieitas FragosoÎncă nu există evaluări
- A History of Top Secret US Aircraft ProgramsDocument378 paginiA History of Top Secret US Aircraft Programskidseismic100% (4)
- Factsheet Crj900 enDocument2 paginiFactsheet Crj900 enFredyBrizuelaÎncă nu există evaluări
- Literature ReviewDocument35 paginiLiterature ReviewHarry Smith0% (1)
- DCS-A-10C Flight Manual ENDocument663 paginiDCS-A-10C Flight Manual ENTheGuilio100% (2)
- Concept For A Lightweight Mars GliderDocument11 paginiConcept For A Lightweight Mars GlidermladenÎncă nu există evaluări
- Piano Di Volo 3Document13 paginiPiano Di Volo 3marketingPerNegatiÎncă nu există evaluări
- Hard and Bounce PDFDocument10 paginiHard and Bounce PDFTun WaiÎncă nu există evaluări
- EDDW Bremen Airport ChartsDocument40 paginiEDDW Bremen Airport ChartsJonasÎncă nu există evaluări
- Active Control of Flow Separation Over An Airfoil Using Synthetic JetsDocument9 paginiActive Control of Flow Separation Over An Airfoil Using Synthetic JetsDrSrujana ReddyÎncă nu există evaluări
- Aerodynamics of Rugby BallDocument5 paginiAerodynamics of Rugby BallChandra HarshaÎncă nu există evaluări
- Gyro GliderDocument3 paginiGyro GliderEmerson UR100% (1)
- Airbus X Autoland TutorialDocument4 paginiAirbus X Autoland TutorialJulio MoreiraÎncă nu există evaluări
- D8H-H2 (Draft Dec2015)Document44 paginiD8H-H2 (Draft Dec2015)forumid2697Încă nu există evaluări
- NASA Mercury-Atlas 9 - Faith 7 Mission ReportDocument438 paginiNASA Mercury-Atlas 9 - Faith 7 Mission ReportOrion2015100% (2)
- Hinge Moment Theoretical CalculationDocument13 paginiHinge Moment Theoretical CalculationArmghan ShabirÎncă nu există evaluări
- Partners in FreedomDocument277 paginiPartners in FreedomF16VIPERÎncă nu există evaluări
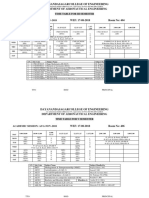
- Master Time Table Wef 17-08-2018Document3 paginiMaster Time Table Wef 17-08-2018Hareesha N GÎncă nu există evaluări