S-ar putea să vă placă și
- 520l0523 - TMT, Tmtu, TMTW, TMT FL and TMTW FL - Ti - Rev - Da - 01-2008Document36 pagini520l0523 - TMT, Tmtu, TMTW, TMT FL and TMTW FL - Ti - Rev - Da - 01-2008Wesame ShnodaÎncă nu există evaluări
- PGP030 031 SeriesDocument28 paginiPGP030 031 SeriesWesame ShnodaÎncă nu există evaluări
- Galtech Pumps MotorsDocument0 paginiGaltech Pumps MotorsWesame ShnodaÎncă nu există evaluări
- CatalogDocument1 paginăCataloglangtu2011Încă nu există evaluări
- ETC ETC ETC ETC: Egyptian Technology CommunicationDocument2 paginiETC ETC ETC ETC: Egyptian Technology CommunicationWesame ShnodaÎncă nu există evaluări
- YServerDocument1 paginăYServerDevinder KumarÎncă nu există evaluări
- Hydraulic System Troubleshooting Guide PDFDocument13 paginiHydraulic System Troubleshooting Guide PDFWesame Shnoda100% (1)
- A6 VDocument40 paginiA6 VWesame Shnoda100% (1)
- كتاب محاسبة التكاليف PDFDocument137 paginiكتاب محاسبة التكاليف PDFgalalwasfiÎncă nu există evaluări
- BTL5-A11-M0650-B-S32 Ordering Code: BTL0174: Output Signal 0 10 V and 10 0 V Nominal Stroke 650 MMDocument2 paginiBTL5-A11-M0650-B-S32 Ordering Code: BTL0174: Output Signal 0 10 V and 10 0 V Nominal Stroke 650 MMWesame ShnodaÎncă nu există evaluări
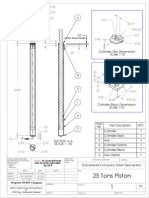
- 1 25 Tons Piston: (Gland Thread Length)Document1 pagină1 25 Tons Piston: (Gland Thread Length)Wesame ShnodaÎncă nu există evaluări
- Report No (1) Haydrulic MachinesDocument15 paginiReport No (1) Haydrulic MachinesWesame Shnoda100% (1)
- Elevators From WikepediaDocument47 paginiElevators From WikepediaWesame ShnodaÎncă nu există evaluări
- Dell Precision 670 SpecsDocument2 paginiDell Precision 670 SpecsRayirth DghÎncă nu există evaluări
- For Information About Installing, Running and Configuring Firefox Including A List of Known Issues and Troubleshooting InformationDocument1 paginăFor Information About Installing, Running and Configuring Firefox Including A List of Known Issues and Troubleshooting InformationgorpÎncă nu există evaluări
- Elevators Type From OttisDocument2 paginiElevators Type From OttisWesame ShnodaÎncă nu există evaluări
- Lifturi Proiectare Partea 1 EnglezaDocument16 paginiLifturi Proiectare Partea 1 EnglezaCernomodiac NicolaeÎncă nu există evaluări
- UntitledDocument3 paginiUntitledWesame ShnodaÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Murata Data Caps ESR ESLDocument6 paginiMurata Data Caps ESR ESLecl_manÎncă nu există evaluări
- Rotary Valve Functions BookletDocument17 paginiRotary Valve Functions Bookletamahmoud3Încă nu există evaluări
- Basic Electronics Lab ManualDocument47 paginiBasic Electronics Lab ManualAlpesh ThesiyaÎncă nu există evaluări
- Chapter VI DP and NetworkDocument66 paginiChapter VI DP and NetworkSirgut TesfayeÎncă nu există evaluări
- Flexenclosure Esite Brochure PDFDocument5 paginiFlexenclosure Esite Brochure PDFajdCruiseÎncă nu există evaluări
- NATCO Presentation - Desalters PDFDocument12 paginiNATCO Presentation - Desalters PDFshahmkamalÎncă nu există evaluări
- Chapter 16 - Oral Radiography (Essentials of Dental Assisting)Document96 paginiChapter 16 - Oral Radiography (Essentials of Dental Assisting)mussanteÎncă nu există evaluări
- Creating Attachments To Work Items or To User Decisions in WorkflowsDocument20 paginiCreating Attachments To Work Items or To User Decisions in Workflowselampe100% (1)
- Analysis and Design of Telecommunication Tower Using Different Truss System by ETab SoftwareDocument12 paginiAnalysis and Design of Telecommunication Tower Using Different Truss System by ETab SoftwareEditor IJTSRDÎncă nu există evaluări
- 1 Tail & 2 Tail TestDocument3 pagini1 Tail & 2 Tail TestNisha AggarwalÎncă nu există evaluări
- 002 Ac Yoke B100-ParkerDocument2 pagini002 Ac Yoke B100-ParkerNubia BarreraÎncă nu există evaluări
- Disc Brake System ReportDocument20 paginiDisc Brake System ReportGovindaram Rajesh100% (1)
- TitleDocument142 paginiTitleAmar PašićÎncă nu există evaluări
- TOEC8431120DDocument522 paginiTOEC8431120Dvuitinhnhd9817Încă nu există evaluări
- Experiment No. 2 Rockwell Hardness Test IntroductionDocument3 paginiExperiment No. 2 Rockwell Hardness Test IntroductionAhmad Abd100% (1)
- Chap005 3Document26 paginiChap005 3Anass BÎncă nu există evaluări
- Z Series: VZ-80 Series Portable Radio - VHF/UHFDocument2 paginiZ Series: VZ-80 Series Portable Radio - VHF/UHFPrima SonyÎncă nu există evaluări
- DC Power Supply and Voltage RegulatorsDocument73 paginiDC Power Supply and Voltage RegulatorsRalph Justine NevadoÎncă nu există evaluări
- Factors That Affect College Students' Attitudes Toward MathematicsDocument17 paginiFactors That Affect College Students' Attitudes Toward MathematicsAnthony BernardinoÎncă nu există evaluări
- Review Paper On Distributed ArchitectureDocument28 paginiReview Paper On Distributed ArchitectureWeb GuruÎncă nu există evaluări
- Quarter 4 Summative Test No. 1 Mga Layunin Code Bahagda N Bilang NG Aytem Kinalalagyan NG BilangDocument4 paginiQuarter 4 Summative Test No. 1 Mga Layunin Code Bahagda N Bilang NG Aytem Kinalalagyan NG Bilangmichelle milleondagaÎncă nu există evaluări
- Lab 3.1 - Configuring and Verifying Standard ACLsDocument9 paginiLab 3.1 - Configuring and Verifying Standard ACLsRas Abel BekeleÎncă nu există evaluări
- Slip Rings: SRI085 V100 - XX - XX - Xxx1XxDocument3 paginiSlip Rings: SRI085 V100 - XX - XX - Xxx1XxMatheus Henrique MattiaÎncă nu există evaluări
- Stellar Evolution SimulationDocument2 paginiStellar Evolution Simulationncl12142Încă nu există evaluări
- Data Structures and Other Objects Using C++, Third Edition, by Michael Main and Walter SavitchDocument6 paginiData Structures and Other Objects Using C++, Third Edition, by Michael Main and Walter SavitchMd Rubaiyat BhuiyanÎncă nu există evaluări
- College of Technology & Engineering: Practical Training at Hindustan Zinc Limited Zinc Smelter, Debari UdaipurDocument24 paginiCollege of Technology & Engineering: Practical Training at Hindustan Zinc Limited Zinc Smelter, Debari UdaipurPooja SahuÎncă nu există evaluări
- Epson WorkForce Pro WF-C878-879RDocument8 paginiEpson WorkForce Pro WF-C878-879Rsales2 HARMONYSISTEMÎncă nu există evaluări
- 7PA30121AA000 Datasheet enDocument2 pagini7PA30121AA000 Datasheet enMirko DjukanovicÎncă nu există evaluări
- Lynx LX v8Document5 paginiLynx LX v8Bambang KaryantoÎncă nu există evaluări
- Practice Question ElectricityDocument3 paginiPractice Question ElectricityIvan SetyawanÎncă nu există evaluări