S-ar putea să vă placă și
- Study of AC and DC Converter: Efficient Power ConversionDocument6 paginiStudy of AC and DC Converter: Efficient Power ConversionBeena PalÎncă nu există evaluări
- Bose - Lifestyle CD-20 - Service ManualDocument96 paginiBose - Lifestyle CD-20 - Service ManualStevenÎncă nu există evaluări
- Power Electronics Lab Manual-withoutreadingsandprepostlab-EE0314Document69 paginiPower Electronics Lab Manual-withoutreadingsandprepostlab-EE0314Sankaran Nampoothiri KrishnanÎncă nu există evaluări
- 1.single Phase AC To DC Fully Controlled Converter PDFDocument10 pagini1.single Phase AC To DC Fully Controlled Converter PDFAshwin RaghavanÎncă nu există evaluări
- Chopper 2003Document40 paginiChopper 2003Agus SetyawanÎncă nu există evaluări
- Line Commutated Converters ExplainedDocument10 paginiLine Commutated Converters ExplainedJay Romar PabianiaÎncă nu există evaluări
- AN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipDocument48 paginiAN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipbmmostefaÎncă nu există evaluări
- Chapter 7. Switched-Inductor Regulators With Design Insight and Intuition (Power IC Design)Document119 paginiChapter 7. Switched-Inductor Regulators With Design Insight and Intuition (Power IC Design)Minh Hai RungÎncă nu există evaluări
- 02 Uncontrolled AC To DC Converters3Document46 pagini02 Uncontrolled AC To DC Converters3siegfred sicatÎncă nu există evaluări
- Ćuk ConverterDocument4 paginiĆuk ConverterSuneet Kumar RathÎncă nu există evaluări
- Buck ConvertorDocument10 paginiBuck ConvertorGirish MohantyÎncă nu există evaluări
- 326 108 Icepower 200asc Class D Amp With Power Supply Module 1x200w Data SheetDocument25 pagini326 108 Icepower 200asc Class D Amp With Power Supply Module 1x200w Data SheetnotlianÎncă nu există evaluări
- Project Report On Buck Boost ConverterDocument8 paginiProject Report On Buck Boost Convertergmd technical100% (1)
- DC-DC Converters Lab ManualDocument32 paginiDC-DC Converters Lab ManualShah SahadÎncă nu există evaluări
- Boost DC-DC Converter Analysis and DesignDocument13 paginiBoost DC-DC Converter Analysis and DesignKarthickÎncă nu există evaluări
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDe la EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsÎncă nu există evaluări
- DC-DC ConvertersDocument8 paginiDC-DC ConvertersNuruddin MuktaruddinÎncă nu există evaluări
- Chapter 2 - RectifiersDocument79 paginiChapter 2 - RectifiersMark Johnson100% (2)
- Principles of Biomedical Instrumentation by Andrew G. WebbDocument344 paginiPrinciples of Biomedical Instrumentation by Andrew G. Webbawrgwerg100% (1)
- Study and Design, Simulation of PWM Based Buck Converter For Low Power ApplicationDocument17 paginiStudy and Design, Simulation of PWM Based Buck Converter For Low Power ApplicationIOSRjournalÎncă nu există evaluări
- DC-DC ConverterDocument12 paginiDC-DC ConvertersabariÎncă nu există evaluări
- Operation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurDocument6 paginiOperation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurAhana MalhotraÎncă nu există evaluări
- TP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimesDocument7 paginiTP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimespapipapii100% (1)
- Generating 50Hz PWM Using PIC16F877ADocument2 paginiGenerating 50Hz PWM Using PIC16F877AZarko DacevicÎncă nu există evaluări
- Bi-Directional DC-to-DC Converter For Solar Applications With Battery BackupDocument5 paginiBi-Directional DC-to-DC Converter For Solar Applications With Battery BackupPaulius BruneikaÎncă nu există evaluări
- Double Frequency Buck ConverterDocument36 paginiDouble Frequency Buck ConverterSanthosh Guduru100% (1)
- Modeling of DC DC Converter PDFDocument6 paginiModeling of DC DC Converter PDFVishal AryaÎncă nu există evaluări
- Double Frequency Buck ConverterDocument68 paginiDouble Frequency Buck ConverterSanthosh GuduruÎncă nu există evaluări
- CUK CONVERTER: A Versatile DC-DC Converter TopologyDocument13 paginiCUK CONVERTER: A Versatile DC-DC Converter TopologypakalagopalÎncă nu există evaluări
- Buck ConvertersDocument15 paginiBuck Convertersmuddassir07100% (2)
- Digitally Controlled Buck Converter: Design and ImplementationDocument12 paginiDigitally Controlled Buck Converter: Design and ImplementationaaqibÎncă nu există evaluări
- DC Motor Speed Control With PIC MicrocontrollerDocument4 paginiDC Motor Speed Control With PIC MicrocontrollerEngr Jawad Ali100% (1)
- Boost DesignDocument4 paginiBoost DesignmuthukumartharaniÎncă nu există evaluări
- Boost ConverterDocument8 paginiBoost Converterhamza abdo mohamoudÎncă nu există evaluări
- Design Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsDocument12 paginiDesign Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsnandhakumarmeÎncă nu există evaluări
- Ee 328 Lecture 4Document33 paginiEe 328 Lecture 4Eric KerrÎncă nu există evaluări
- On AC Voltage ControllersDocument25 paginiOn AC Voltage ControllersSahil ChoudharyÎncă nu există evaluări
- The Design and Formula of DC To DC Converter SmpsDocument9 paginiThe Design and Formula of DC To DC Converter Smpsdewidewi76Încă nu există evaluări
- Transformer Less POWER SUPPLY REPORTDocument7 paginiTransformer Less POWER SUPPLY REPORTضياء بن احمد الكباري67% (3)
- 3731.three Phase Rectifier PresentationDocument48 pagini3731.three Phase Rectifier PresentationMithunMÎncă nu există evaluări
- DC-DC Buck Converter: Principles and EvolutionDocument36 paginiDC-DC Buck Converter: Principles and EvolutionAnas RajputÎncă nu există evaluări
- Chris Basso APEC Seminar 2019Document154 paginiChris Basso APEC Seminar 2019Yung SangÎncă nu există evaluări
- 5v DC SupplyDocument19 pagini5v DC SupplyDev Agarwal100% (1)
- Precision Rectifier CircuitsDocument13 paginiPrecision Rectifier CircuitsWaqas PervaizÎncă nu există evaluări
- Transformerless Power SupplyDocument3 paginiTransformerless Power SupplyRafael Vazquez VillamarÎncă nu există evaluări
- DC to DC Converter FundamentalsDocument40 paginiDC to DC Converter FundamentalsJamir CalÎncă nu există evaluări
- Flyback Converter: J. FisherDocument16 paginiFlyback Converter: J. FisherDaniel NimabwayaÎncă nu există evaluări
- Art3 - (S1), Florian Ion, 17-22Document6 paginiArt3 - (S1), Florian Ion, 17-22camiloÎncă nu există evaluări
- 3 Phase Full Wave Bridge ConverterDocument4 pagini3 Phase Full Wave Bridge Convertersubhasishpodder100% (1)
- Chopper DC To DC ConverterDocument37 paginiChopper DC To DC ConverterGautam Kumar100% (1)
- Unit-4 Static Relays (Switchgear and Protection)Document54 paginiUnit-4 Static Relays (Switchgear and Protection)sujithÎncă nu există evaluări
- Simple LCC Resonant Half Bridge Converter Solution: NCP160 (2) 2 + NCL30059Document21 paginiSimple LCC Resonant Half Bridge Converter Solution: NCP160 (2) 2 + NCL30059alokÎncă nu există evaluări
- Unit V Ac Voltage ControllersDocument33 paginiUnit V Ac Voltage Controllerssaikarthick023Încă nu există evaluări
- CYCLOCONVERTERDocument17 paginiCYCLOCONVERTERRachmat Guntur Dwi Putra100% (1)
- Buck ConverterDocument31 paginiBuck Converterbalak144Încă nu există evaluări
- Closed Loop Flyback ConverterDocument18 paginiClosed Loop Flyback ConverterIlavarasan SanÎncă nu există evaluări
- DC-DC Converter FundamentalsDocument63 paginiDC-DC Converter FundamentalsFaida HamidÎncă nu există evaluări
- Paper Modulacion PWM With AN-42026Document16 paginiPaper Modulacion PWM With AN-42026DuckTronixÎncă nu există evaluări
- Power Supply ProjectDocument16 paginiPower Supply ProjectMichal ValakovičÎncă nu există evaluări
- Buck Converter Design for High Speed ProcessorDocument5 paginiBuck Converter Design for High Speed ProcessorGAURAV SHETÎncă nu există evaluări
- A State Space Modeling of Non-Isolated BidirectionDocument11 paginiA State Space Modeling of Non-Isolated BidirectionabdullahshahidÎncă nu există evaluări
- Power Electronics NotesDocument2 paginiPower Electronics Notesprasad357Încă nu există evaluări
- Final ReviewDocument19 paginiFinal ReviewSanyam JainÎncă nu există evaluări
- MR JE BrochureDocument116 paginiMR JE BrochureAlberto Suazo BasaezÎncă nu există evaluări
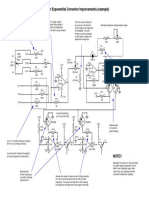
- State Variable Filter Exponential Convertor Improvements (Example)Document1 paginăState Variable Filter Exponential Convertor Improvements (Example)fidel.certucheÎncă nu există evaluări
- Switched-Capacitor Filters: - "Analog" Sampled-Data FiltersDocument24 paginiSwitched-Capacitor Filters: - "Analog" Sampled-Data FiltersPushpendra DwivediÎncă nu există evaluări
- Wireless Power Transfer DeviceDocument65 paginiWireless Power Transfer DevicebhagathnagarÎncă nu există evaluări
- Performance Improvement of A Buck Converter Using Kalman FilterDocument2 paginiPerformance Improvement of A Buck Converter Using Kalman FilterShadÎncă nu există evaluări
- Active FiltersDocument26 paginiActive FiltersLaraÎncă nu există evaluări
- Practical PhysicsDocument2 paginiPractical PhysicsJafucÎncă nu există evaluări
- LM5021 AC-DC Current Mode PWM Controller: Literature Number: SNVS359CDocument18 paginiLM5021 AC-DC Current Mode PWM Controller: Literature Number: SNVS359CcandraeÎncă nu există evaluări
- Band Stop FilterDocument5 paginiBand Stop FilterShiva DubeyÎncă nu există evaluări
- Coupled Line Bandpass FilterDocument70 paginiCoupled Line Bandpass Filterash9977100% (1)
- Comparison Between PI and PR Current Controllers in Grid Connected PV InvertersDocument6 paginiComparison Between PI and PR Current Controllers in Grid Connected PV InvertersMuhammad ZahidÎncă nu există evaluări
- 160 Grundfos Motor BookDocument16 pagini160 Grundfos Motor BookKraponis TylnessÎncă nu există evaluări
- Varactor Tuned Ring Resonator Filter With Wide Tunable BandwidthDocument3 paginiVaractor Tuned Ring Resonator Filter With Wide Tunable BandwidthXiaoguang LiuÎncă nu există evaluări
- Chokes and FiltersDocument12 paginiChokes and FiltersShashankSharmaÎncă nu există evaluări
- IIR Filter Design and Analysis Using Notch and Comb FilterDocument4 paginiIIR Filter Design and Analysis Using Notch and Comb FilterijsretÎncă nu există evaluări
- CT Lab Expt 1Document8 paginiCT Lab Expt 1Sanjana DeshkumarÎncă nu există evaluări
- Amplification en 0Document42 paginiAmplification en 0ABDUL GHAFOORÎncă nu există evaluări
- An 7517Document9 paginiAn 7517MallickarjunaÎncă nu există evaluări
- EC6503-Transmission Lines and WaveguidesDocument15 paginiEC6503-Transmission Lines and WaveguidesAnonymous lt2LFZH100% (1)
- Tables of Chebyshev Impedance-Transforming Networks of Low-Pass Filter FormDocument25 paginiTables of Chebyshev Impedance-Transforming Networks of Low-Pass Filter FormaqsaehsanÎncă nu există evaluări
- AD1954 Eval BoardDocument20 paginiAD1954 Eval Boardgesper100% (1)
- Advanced Power Electronics Homework #2 Filter StudyDocument19 paginiAdvanced Power Electronics Homework #2 Filter StudyTo Dinh DuÎncă nu există evaluări
- 160A 460V 3-phase passive filter for variable speed drivesDocument5 pagini160A 460V 3-phase passive filter for variable speed drivesAllan SouzaÎncă nu există evaluări
- Week-3-SlidesDocument79 paginiWeek-3-Slidesزكرياء بنحيرتÎncă nu există evaluări
- Help Manual PDFDocument19 paginiHelp Manual PDFRamanathanÎncă nu există evaluări
- En - ku990r Svc Eng - 080611 Не Нужные Водяные ЗнакиDocument225 paginiEn - ku990r Svc Eng - 080611 Не Нужные Водяные ЗнакиMaxAllgeruÎncă nu există evaluări