S-ar putea să vă placă și
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Official Kanban Guide From Kanban UniversityDocument20 paginiThe Official Kanban Guide From Kanban UniversityPiyush ShuklaÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Monash BrochureDocument68 paginiMonash BrochurePiyush ShuklaÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- C TutorialDocument24 paginiC TutorialPiyush ShuklaÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Ns 3 TutorialDocument107 paginiNs 3 Tutorialragh89Încă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- MATLAB - Introduction To RoboticsDocument24 paginiMATLAB - Introduction To RoboticsPrabakaran PrakashÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- RobotBuilding Chapter2Document15 paginiRobotBuilding Chapter2suresh051Încă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Building Low Cost Autonomous RobotsDocument13 paginiBuilding Low Cost Autonomous RobotsPiyush ShuklaÎncă nu există evaluări
- CCR PDFDocument5 paginiCCR PDFSudarji0% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Chapter 7 Sensors and TransducersDocument22 paginiChapter 7 Sensors and TransducersAbu ZinnirahÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Class 10 - Electricity - Term IDocument6 paginiClass 10 - Electricity - Term IravilullaÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- PartLow MRC7700 Operqating ManualDocument74 paginiPartLow MRC7700 Operqating ManualLeandro CostaÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Low Resistance Meter LR 2045 SDocument2 paginiLow Resistance Meter LR 2045 Sajaydce05Încă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- 6F2T0172 r4.2 GRE110 ManualDocument296 pagini6F2T0172 r4.2 GRE110 ManualAnonymous DjTnqWXUÎncă nu există evaluări
- Multimeter: Number NSNDocument52 paginiMultimeter: Number NSNXptoleo LeoÎncă nu există evaluări
- 6W 2-Channel, Bridge 19W Typ Power Amplifier: Package Dimensions FeaturesDocument13 pagini6W 2-Channel, Bridge 19W Typ Power Amplifier: Package Dimensions FeaturesVicente MorenoÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Hoang Duy TanDocument33 paginiHoang Duy TanMinh LeÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- EEE Lecture Notes-1Document118 paginiEEE Lecture Notes-1shivaspyÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Digital Object CounterDocument9 paginiDigital Object CounterAnil Yvs100% (1)
- SCR 536Document85 paginiSCR 536Steven Howell100% (1)
- BSC Aircraft MainDocument35 paginiBSC Aircraft MainAyem perumalÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- EST Answer On BookmarkDocument26 paginiEST Answer On Bookmarkjj012586100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- LC40 - 60le810unDocument96 paginiLC40 - 60le810unarek__84Încă nu există evaluări
- V80838 Murphy PowerView Wiring DiagramsDocument2 paginiV80838 Murphy PowerView Wiring DiagramsPaulPaucarCampos100% (1)
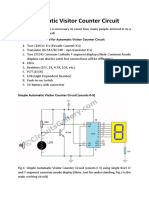
- Automatic Visitor Counter CircuitDocument4 paginiAutomatic Visitor Counter CircuithloÎncă nu există evaluări
- RTHC Svn02c enDocument16 paginiRTHC Svn02c enRicardo100% (1)
- Lab 7 ArtDocument8 paginiLab 7 ArtCharles SiringanÎncă nu există evaluări
- WLC Final DocumentDocument37 paginiWLC Final DocumentNagineni DhanalakshmiÎncă nu există evaluări
- Project Plan FLIP FLOPDocument5 paginiProject Plan FLIP FLOPClark Linogao FelisildaÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- 5040 - MASIBUS CONTROLLER User - Manual PDFDocument53 pagini5040 - MASIBUS CONTROLLER User - Manual PDFYUYWEGDYÎncă nu există evaluări
- BTS 716G - Interruptor de PotênciaDocument14 paginiBTS 716G - Interruptor de PotênciaTiago LeonhardtÎncă nu există evaluări
- Familiarization With Electrical Measuring InstrumentsDocument4 paginiFamiliarization With Electrical Measuring Instrumentshtineza18Încă nu există evaluări
- Triggering in Trigatron Spark Gaps - A Fundamental StudyDocument14 paginiTriggering in Trigatron Spark Gaps - A Fundamental Studysantosh_babar_26Încă nu există evaluări
- 42 LD 450Document43 pagini42 LD 450albundÎncă nu există evaluări
- Cambridge International General Certificate of Secondary EducationDocument16 paginiCambridge International General Certificate of Secondary Educationnesrine boufadenÎncă nu există evaluări
- Technology and Livelihood Education 8: Santisimo Rosario, San Pablo CityDocument3 paginiTechnology and Livelihood Education 8: Santisimo Rosario, San Pablo CityKissarah B. VillanuevaÎncă nu există evaluări
- Atemu enDocument1 paginăAtemu enzamuray666Încă nu există evaluări
- tps54240 q1Document52 paginitps54240 q1Em GomezÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)