S-ar putea să vă placă și
- Prevention of Actuator Emissions in the Oil and Gas IndustryDe la EverandPrevention of Actuator Emissions in the Oil and Gas IndustryÎncă nu există evaluări
- Prevention of Valve Fugitive Emissions in the Oil and Gas IndustryDe la EverandPrevention of Valve Fugitive Emissions in the Oil and Gas IndustryÎncă nu există evaluări
- Control Valve Common Interview QuestionsDocument10 paginiControl Valve Common Interview QuestionsMustafa MehdiÎncă nu există evaluări
- Control Valves Interview QuestionsDocument7 paginiControl Valves Interview QuestionsDerbel WalidÎncă nu există evaluări
- Valve Selection Handbook - IntroductionDocument5 paginiValve Selection Handbook - IntroductionPalazzo345Încă nu există evaluări
- Pressure RegulatorDocument4 paginiPressure RegulatorRICHIHOTS2Încă nu există evaluări
- Section 4Document26 paginiSection 4Fernanda Medeiros CarvalhoÎncă nu există evaluări
- Introduction To ValvesDocument11 paginiIntroduction To ValvesElton SitumeangÎncă nu există evaluări
- Comating Droop in Self-Contained Pressure Regulators (CVR408)Document5 paginiComating Droop in Self-Contained Pressure Regulators (CVR408)HectorÎncă nu există evaluări
- Valve StationDocument3 paginiValve StationashrafÎncă nu există evaluări
- Fluid Power Fluid Power Equipment Tutorial - Other Fluid Power ValvesDocument11 paginiFluid Power Fluid Power Equipment Tutorial - Other Fluid Power ValvesprabhakarmetÎncă nu există evaluări
- Control Valves in Process PlantDocument8 paginiControl Valves in Process Plantmukramah.yusufÎncă nu există evaluări
- Guide to Valve Types, Uses, Maintenance and ControlDocument44 paginiGuide to Valve Types, Uses, Maintenance and Controlأحمد محمد قدريÎncă nu există evaluări
- PrdsDocument0 paginiPrdssandi1111Încă nu există evaluări
- Frese OPTIMA Design Guide - Control Valves for Accurate Flow ModulationDocument16 paginiFrese OPTIMA Design Guide - Control Valves for Accurate Flow Modulation윤병택Încă nu există evaluări
- Final Control Elements Performance CharacteristicsDocument16 paginiFinal Control Elements Performance CharacteristicsSanchit KhannaÎncă nu există evaluări
- Sun Logic Valves ExampleDocument13 paginiSun Logic Valves ExamplerammysiÎncă nu există evaluări
- Pressure Relief Valve: Definition, Types, Working, Location, Sizing, Codes and StandardsDocument18 paginiPressure Relief Valve: Definition, Types, Working, Location, Sizing, Codes and StandardsMalcolm MooreÎncă nu există evaluări
- VALVE TYPES AssignmentDocument10 paginiVALVE TYPES Assignmentbabe100% (2)
- Control Valve - Surge Relief Valve Selection GuideDocument20 paginiControl Valve - Surge Relief Valve Selection GuideSriya PetikiriarachchigeÎncă nu există evaluări
- Manual Cm-760 - 780 InglesDocument121 paginiManual Cm-760 - 780 InglesULISCHAP100% (1)
- Valves Used in Pipelines: Valve Specification Siemens Energy Gas Turbine Inlet FiltersDocument13 paginiValves Used in Pipelines: Valve Specification Siemens Energy Gas Turbine Inlet Filtersravikumar_jamiÎncă nu există evaluări
- Conventional Valves GuideDocument23 paginiConventional Valves GuidePower PlantÎncă nu există evaluări
- Pressure Control Design Guide SummaryDocument10 paginiPressure Control Design Guide SummaryMarkÎncă nu există evaluări
- ValveDocument4 paginiValveshubh shahÎncă nu există evaluări
- Control Valves: Block 6 Control Hardware: Electric/Pneumatic ActuationDocument112 paginiControl Valves: Block 6 Control Hardware: Electric/Pneumatic ActuationSumedha ChathurangaÎncă nu există evaluări
- Multi Point Grease GunDocument29 paginiMulti Point Grease GunMayilai AshokÎncă nu există evaluări
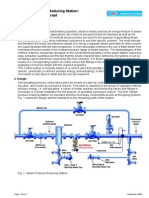
- Designing Steam Pressure Reducing StationsDocument7 paginiDesigning Steam Pressure Reducing StationsMohammed Hassan B KorainaÎncă nu există evaluări
- Control valve characteristics manualDocument9 paginiControl valve characteristics manualSiddhartha SharmaÎncă nu există evaluări
- Siemens Valve SizingDocument32 paginiSiemens Valve SizingSteven Wei100% (2)
- Capacity Control of Reciprocating Compressors Used in Refrigerati PDFDocument9 paginiCapacity Control of Reciprocating Compressors Used in Refrigerati PDFRapee PuaksungnoenÎncă nu există evaluări
- OVERPRESSURE PROTECTION METHODS REVIEWDocument6 paginiOVERPRESSURE PROTECTION METHODS REVIEWJohn Jairo ValenciaÎncă nu există evaluări
- Regulador AxialDocument12 paginiRegulador Axialluis_d_mÎncă nu există evaluări
- Surge Relief Valve Definition Function Types Sizing SelectionDocument6 paginiSurge Relief Valve Definition Function Types Sizing Selectionkamala 123Încă nu există evaluări
- chp 3& 6 ihp msdteDocument10 paginichp 3& 6 ihp msdteRocky JÎncă nu există evaluări
- Introduction To Electric / Pneumatic ControlsDocument17 paginiIntroduction To Electric / Pneumatic ControlsVipin KrishnanÎncă nu există evaluări
- Pressure Relief Valves ExplainedDocument11 paginiPressure Relief Valves ExplainedNyoman RakaÎncă nu există evaluări
- ICH3800 Class 7: 1st Semester 2022Document92 paginiICH3800 Class 7: 1st Semester 2022catalinaÎncă nu există evaluări
- Section 30 - Relief ValvesDocument17 paginiSection 30 - Relief ValveshammamiÎncă nu există evaluări
- Introduction To Valve ElectricDocument16 paginiIntroduction To Valve ElectricNguyễn Dương Anh NgọcÎncă nu există evaluări
- Valve Classification According To Port SizeDocument6 paginiValve Classification According To Port SizeMuhammad AbdullahÎncă nu există evaluări
- PRD Design FundamentalsDocument6 paginiPRD Design Fundamentalsnarayanan_anoobÎncă nu există evaluări
- Large Size Quarter Turn Control Valves Can Improve Safety in PipelinesDocument19 paginiLarge Size Quarter Turn Control Valves Can Improve Safety in PipelinesgpuzoneÎncă nu există evaluări
- Control Valve Question and Answer - 2Document13 paginiControl Valve Question and Answer - 2TATA STEELÎncă nu există evaluări
- Hassan SalahDocument10 paginiHassan SalahAsst. Prof. Dr. Ahmed Hameed KaleelÎncă nu există evaluări
- Manual Comando Control Air Hd2Document12 paginiManual Comando Control Air Hd2Brian Schmidt100% (2)
- SECTION7Document168 paginiSECTION7Palmério CarvalhoÎncă nu există evaluări
- Industrial Hydraulic CircuitsDocument43 paginiIndustrial Hydraulic CircuitsFidel Garcia GarciaÎncă nu există evaluări
- 4 TH Unit ValvesDocument43 pagini4 TH Unit ValvesBahaa EmadÎncă nu există evaluări
- Sequence ValveDocument8 paginiSequence Valvemr3478Încă nu există evaluări
- Reliable - Dry Pipe Valve SystemDocument8 paginiReliable - Dry Pipe Valve Systemmina elromanyÎncă nu există evaluări
- Pressure-Control Valves PDFDocument15 paginiPressure-Control Valves PDFRagab Abulmagd100% (1)
- 335 Model DDX-LP Dry Pipe Valve SystemDocument8 pagini335 Model DDX-LP Dry Pipe Valve SystemM Kumar MarimuthuÎncă nu există evaluări
- ! CEB Over Centre Cartridge ValveDocument75 pagini! CEB Over Centre Cartridge ValvekmstamimÎncă nu există evaluări
- Proportional Electro-Hydraulic ControlsDocument31 paginiProportional Electro-Hydraulic ControlshassanHyro43100% (3)
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGDe la EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGÎncă nu există evaluări
- Hydraulics and Pneumatics: A Technician's and Engineer's GuideDe la EverandHydraulics and Pneumatics: A Technician's and Engineer's GuideEvaluare: 4 din 5 stele4/5 (8)
- Emulsions and Oil Treating Equipment: Selection, Sizing and TroubleshootingDe la EverandEmulsions and Oil Treating Equipment: Selection, Sizing and TroubleshootingEvaluare: 5 din 5 stele5/5 (3)
- DC Planning PDFDocument12 paginiDC Planning PDFanimeshdocÎncă nu există evaluări
- Vavr-6phpbu R2 enDocument11 paginiVavr-6phpbu R2 enAliciaÎncă nu există evaluări
- Main Steam, Reheat Steam, Bypass Steam SystemDocument1 paginăMain Steam, Reheat Steam, Bypass Steam SystemSuperstarVirgoÎncă nu există evaluări
- LT Cable DatasheetDocument29 paginiLT Cable DatasheetSuperstarVirgoÎncă nu există evaluări
- KPI Book SampleDocument36 paginiKPI Book Samplegtsouza67% (3)
- Calculation Flow NozzlesDocument14 paginiCalculation Flow NozzlesSuperstarVirgoÎncă nu există evaluări
- PF I League Tables 2016Document40 paginiPF I League Tables 2016SuperstarVirgoÎncă nu există evaluări
- Snis-6uj2mq R1 enDocument25 paginiSnis-6uj2mq R1 enSuperstarVirgoÎncă nu există evaluări
- EPC Template: Engineering, Procurement and Construction AgreementDocument59 paginiEPC Template: Engineering, Procurement and Construction Agreementjunaid112Încă nu există evaluări
- HP Heater #2Document1 paginăHP Heater #2SuperstarVirgoÎncă nu există evaluări
- Air and Flue Gas System P&IDDocument1 paginăAir and Flue Gas System P&IDSuperstarVirgoÎncă nu există evaluări
- Light Diesel Oil SystemDocument1 paginăLight Diesel Oil SystemSuperstarVirgoÎncă nu există evaluări
- Power Plant Steam Piping Isometric DrawingDocument1 paginăPower Plant Steam Piping Isometric DrawingSuperstarVirgo100% (4)
- R For BeginnersDocument76 paginiR For BeginnersChiucheng LiuÎncă nu există evaluări
- GSC To Heater PipingDocument1 paginăGSC To Heater PipingSuperstarVirgoÎncă nu există evaluări
- CRH To Condenser Dump Line Isometric DrawingDocument1 paginăCRH To Condenser Dump Line Isometric DrawingSuperstarVirgoÎncă nu există evaluări
- Condensate Pump To Heater PipingDocument1 paginăCondensate Pump To Heater PipingSuperstarVirgoÎncă nu există evaluări
- Condenser Hotwell Discharge PipingDocument1 paginăCondenser Hotwell Discharge PipingSuperstarVirgoÎncă nu există evaluări
- Hangers For Condensate PipingDocument1 paginăHangers For Condensate PipingSuperstarVirgoÎncă nu există evaluări
- Condensate Pump Outlet PipingDocument1 paginăCondensate Pump Outlet PipingSuperstarVirgoÎncă nu există evaluări
- Feed Turbne PipingDocument1 paginăFeed Turbne PipingSuperstarVirgoÎncă nu există evaluări
- Condensate Water PipingDocument1 paginăCondensate Water PipingSuperstarVirgoÎncă nu există evaluări
- Boiler Blowdown SYstem Piping IsometricDocument1 paginăBoiler Blowdown SYstem Piping IsometricSuperstarVirgoÎncă nu există evaluări
- Low Pressure Feedwater PipingDocument1 paginăLow Pressure Feedwater PipingSuperstarVirgoÎncă nu există evaluări
- Mill Firefighting Piping IsometricDocument1 paginăMill Firefighting Piping IsometricSuperstarVirgoÎncă nu există evaluări
- Tailoring The Specifications For Pressure Reducing ValvesDocument13 paginiTailoring The Specifications For Pressure Reducing ValvesSuperstarVirgoÎncă nu există evaluări
- Extraction STeam PipingDocument1 paginăExtraction STeam PipingSuperstarVirgoÎncă nu există evaluări
- Extraction STeam PipingDocument1 paginăExtraction STeam PipingSuperstarVirgoÎncă nu există evaluări
- SP6-Steel Hand BookDocument209 paginiSP6-Steel Hand BookAmit87% (15)
- API 582 The Welding Solution PDFDocument21 paginiAPI 582 The Welding Solution PDFRemmy Torres Vega75% (8)
- Press Fit SystemDocument44 paginiPress Fit SystemAntonio LantiguaÎncă nu există evaluări
- F3-Flow Through A NozzleDocument21 paginiF3-Flow Through A NozzleTAN PANG ZORÎncă nu există evaluări
- 09 AE2258 Aerodynamics Lab ManualDocument26 pagini09 AE2258 Aerodynamics Lab ManualBrandon Spence100% (5)
- JSPLDocument19 paginiJSPLAnkitÎncă nu există evaluări
- Service Air CompresorDocument75 paginiService Air CompresorDamitha100% (2)
- Lec 6 Fluid Kinematics PDFDocument21 paginiLec 6 Fluid Kinematics PDFTAYMOOR IMRANÎncă nu există evaluări
- Turbo Lab 1Document10 paginiTurbo Lab 1Seng SoonÎncă nu există evaluări
- Catalogo de Controles CO2Document16 paginiCatalogo de Controles CO2miguel callataÎncă nu există evaluări
- Sublimation of CaffeineDocument3 paginiSublimation of CaffeineNabil ShaikhÎncă nu există evaluări
- Piping Inspection and Test PlanDocument22 paginiPiping Inspection and Test PlanHaythem Ben Zid100% (1)
- Genral Final With New QuestionsDocument83 paginiGenral Final With New QuestionsUttam Maurya100% (1)
- (Backup) CHAPTER 1.5 - SEPARATORDocument45 pagini(Backup) CHAPTER 1.5 - SEPARATORPeet AmranÎncă nu există evaluări
- E406 81 (2012)Document4 paginiE406 81 (2012)diego rodriguezÎncă nu există evaluări
- AE 412 Space Propulsion QuizDocument8 paginiAE 412 Space Propulsion QuizShear WindÎncă nu există evaluări
- Types of Agitators and Their FunctionsDocument5 paginiTypes of Agitators and Their FunctionsELISHAMORE MACHINGURAÎncă nu există evaluări
- ASCONumaticsExpressCatalogue ANEC R4!11!01 13to01!31!14Document64 paginiASCONumaticsExpressCatalogue ANEC R4!11!01 13to01!31!14Sairam SathiyanarayananÎncă nu există evaluări
- PET 332 E Production Engineering & Surface FacilitiesDocument13 paginiPET 332 E Production Engineering & Surface Facilities000Încă nu există evaluări
- Crane FS FM463 FA463 FM466 Wafer Check Valves IOM 1020Document2 paginiCrane FS FM463 FA463 FM466 Wafer Check Valves IOM 1020Septiana DamayantiÎncă nu există evaluări
- CHEM 3615 Answer Key For Problem Set #3 - Real Gases: Solution: For A Van Der Waals GasDocument15 paginiCHEM 3615 Answer Key For Problem Set #3 - Real Gases: Solution: For A Van Der Waals GasAl StudentÎncă nu există evaluări
- Refinery ComplexDocument88 paginiRefinery ComplexAndy UgohÎncă nu există evaluări
- CH 5 Cls VIIA ChemistryDocument3 paginiCH 5 Cls VIIA ChemistryTrixxy CarterÎncă nu există evaluări
- General Instruction Manual: Saudi Arabian Oil Company (Saudi Aramco)Document9 paginiGeneral Instruction Manual: Saudi Arabian Oil Company (Saudi Aramco)Delta akathehuskyÎncă nu există evaluări
- A 2-Stage Cascade Refrigeration CycleDocument8 paginiA 2-Stage Cascade Refrigeration CycleSaeikh Z. HassanÎncă nu există evaluări
- PRO ENVIRONMENT SDN BHD Air Pollution Control and Water Treatment SolutionsDocument18 paginiPRO ENVIRONMENT SDN BHD Air Pollution Control and Water Treatment Solutionskhai ruleÎncă nu există evaluări
- Shell Middle Distillate Synthesis: The Process, The Plant, The ProductsDocument5 paginiShell Middle Distillate Synthesis: The Process, The Plant, The ProductsEan7731451Încă nu există evaluări
- Ensuring Reliability of Compressor Gas Seals During Long Periods of Pressurized HoldDocument10 paginiEnsuring Reliability of Compressor Gas Seals During Long Periods of Pressurized HoldKader BenÎncă nu există evaluări
- LPG Properties and Safe HandlingDocument54 paginiLPG Properties and Safe Handlinglestermusca100% (2)
- Solid and Fluids: (Physics For Engineer)Document42 paginiSolid and Fluids: (Physics For Engineer)Lee TalierÎncă nu există evaluări
- Effect of Lean Amine Temperature on Gas SweeteningDocument5 paginiEffect of Lean Amine Temperature on Gas SweeteningYorman Zambrano SilvaÎncă nu există evaluări
- Oxygen (Oxygenium) : The International Pharmacopoeia - Tenth Edition, 2020Document5 paginiOxygen (Oxygenium) : The International Pharmacopoeia - Tenth Edition, 2020Passmore DubeÎncă nu există evaluări