S-ar putea să vă placă și
- How To Install Windows 7Document2 paginiHow To Install Windows 7Sudhakar SpartanÎncă nu există evaluări
- Microarchitecture Configurations and Floorplanning Co-OptimizationDocument12 paginiMicroarchitecture Configurations and Floorplanning Co-OptimizationSudhakar SpartanÎncă nu există evaluări
- A Novel Charge Recycling Design Scheme Based On Adiabatic Charge PumpDocument13 paginiA Novel Charge Recycling Design Scheme Based On Adiabatic Charge PumpSudhakar SpartanÎncă nu există evaluări
- Internal Combustion Engine: Induction TuningDocument39 paginiInternal Combustion Engine: Induction TuningSudhakar SpartanÎncă nu există evaluări
- VP-Administrative VP-Conferences VP-Publications VP-Technical ActivitiesDocument1 paginăVP-Administrative VP-Conferences VP-Publications VP-Technical ActivitiesSudhakar SpartanÎncă nu există evaluări
- February 2007 Number 2 Itcob4 (ISSN 1063-8210) : Regular PapersDocument1 paginăFebruary 2007 Number 2 Itcob4 (ISSN 1063-8210) : Regular PapersSudhakar SpartanÎncă nu există evaluări
- Double Error Correcting Codes With Improved Code Rates: Martin Rak Us - Peter Farka SDocument6 paginiDouble Error Correcting Codes With Improved Code Rates: Martin Rak Us - Peter Farka SSudhakar SpartanÎncă nu există evaluări
- AUGUST 2007 Number 8 Itcob4 (ISSN 1063-8210) : Special Section PapersDocument1 paginăAUGUST 2007 Number 8 Itcob4 (ISSN 1063-8210) : Special Section PapersSudhakar SpartanÎncă nu există evaluări
- VP-Administrative VP-Conferences VP-Publications VP-Technical ActivitiesDocument1 paginăVP-Administrative VP-Conferences VP-Publications VP-Technical ActivitiesSudhakar SpartanÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Dosage Calculation: Key TermsDocument30 paginiDosage Calculation: Key TermsVijaÎncă nu există evaluări
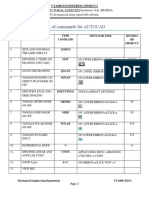
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocument15 paginiList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelÎncă nu există evaluări
- Elbow MethodDocument18 paginiElbow MethodOsmar SalvadorÎncă nu există evaluări
- PyBaMM PaperDocument9 paginiPyBaMM PapervishnuÎncă nu există evaluări
- MTAP Reviewer Grade 3Document3 paginiMTAP Reviewer Grade 3Clarisa Ella Dapula95% (150)
- MathsDocument16 paginiMathsAmith LakshmanÎncă nu există evaluări
- Modelacion Calida Agua Parte 1Document14 paginiModelacion Calida Agua Parte 1Gisell AguilarÎncă nu există evaluări
- Geh 6676 Power System Stabilizer For EX2100 Excitation ControlDocument48 paginiGeh 6676 Power System Stabilizer For EX2100 Excitation ControlSupolÎncă nu există evaluări
- The Progress of Consolidation in A Clay Layer Increasing-Gibson PDFDocument12 paginiThe Progress of Consolidation in A Clay Layer Increasing-Gibson PDFAnonymous GnfGTwÎncă nu există evaluări
- RM 4Document37 paginiRM 4RHEALYN GEMOTOÎncă nu există evaluări
- ProblemDocument2 paginiProblemJishnuÎncă nu există evaluări
- E & P Cycle in Petroleum Industry: A Question of Risk and UncertaintyDocument38 paginiE & P Cycle in Petroleum Industry: A Question of Risk and UncertaintyAdvait DeshmukhÎncă nu există evaluări
- Stat Module 5Document10 paginiStat Module 5Remar Jhon PaineÎncă nu există evaluări
- How Many Interviews Are Enough - On Data SaturationDocument25 paginiHow Many Interviews Are Enough - On Data SaturationpanderetitaestudiaÎncă nu există evaluări
- L As Level Physics A 2821 01 January 2008 Question Paper Old g481Document16 paginiL As Level Physics A 2821 01 January 2008 Question Paper Old g481dasha962Încă nu există evaluări
- Mphasis Aptitude Questions AnswersDocument11 paginiMphasis Aptitude Questions Answersmaccha macchaÎncă nu există evaluări
- Sek - Men.Keb. Tinggi Melaka (Malacca High School. Estd.1826)Document19 paginiSek - Men.Keb. Tinggi Melaka (Malacca High School. Estd.1826)Lee Shi HockÎncă nu există evaluări
- Speed and Position Control of A DC Motor Using ATmega328Document5 paginiSpeed and Position Control of A DC Motor Using ATmega328GRD JournalsÎncă nu există evaluări
- Strouhal ADocument8 paginiStrouhal Asivaaero41Încă nu există evaluări
- Analytical Dynamics - WikipediaDocument5 paginiAnalytical Dynamics - WikipediaHEIN HTETÎncă nu există evaluări
- Grade 3 MTAP Sample Problem Set 1Document14 paginiGrade 3 MTAP Sample Problem Set 1Jianmagz Gaming100% (1)
- Einstein 1937Document12 paginiEinstein 1937JonathanHdzÎncă nu există evaluări
- Math Demo PlanDocument3 paginiMath Demo PlanJudith Mondejar De MayoÎncă nu există evaluări
- Problem Set #5 Solutions: CopolymerizationDocument10 paginiProblem Set #5 Solutions: Copolymerizationmuzammil hussainÎncă nu există evaluări
- PPRF Complete Research Report PDFDocument53 paginiPPRF Complete Research Report PDFGuillermo Bautista FuerteÎncă nu există evaluări
- Optimal Agricultural Land Use: An Efficient Neutrosophic Linear Programming MethodDocument7 paginiOptimal Agricultural Land Use: An Efficient Neutrosophic Linear Programming MethodScience DirectÎncă nu există evaluări
- Quality Control and Analysis: Ujvnl Ae 2016Document7 paginiQuality Control and Analysis: Ujvnl Ae 2016Sagar ThengilÎncă nu există evaluări
- Central Force Problem: Reduction of Two Body ProblemDocument7 paginiCentral Force Problem: Reduction of Two Body ProblemParasIvlnÎncă nu există evaluări
- JuliaPro v0.6.2.1 Package API ManualDocument480 paginiJuliaPro v0.6.2.1 Package API ManualCapitan TorpedoÎncă nu există evaluări