S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Inivitation LetterDocument2 paginiInivitation LetterAneef IzharÎncă nu există evaluări
- Pid 1Document20 paginiPid 1Nithindev GuttikondaÎncă nu există evaluări
- Pid 1Document20 paginiPid 1Nithindev GuttikondaÎncă nu există evaluări
- 32 Bfe 50 D 0 A 529 BF 077Document8 pagini32 Bfe 50 D 0 A 529 BF 077Aneef IzharÎncă nu există evaluări
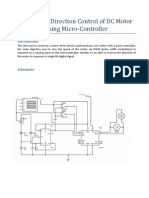
- Speed and Direction Control of DC Motor Using MicroDocument3 paginiSpeed and Direction Control of DC Motor Using MicroAneef IzharÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- AA 003823 PB 3 ANX7411 Product BriefDocument2 paginiAA 003823 PB 3 ANX7411 Product BriefChau Nguyen MinhÎncă nu există evaluări
- TTS1073: Concepts & Applications of ITDocument39 paginiTTS1073: Concepts & Applications of ITramlanhjÎncă nu există evaluări
- Manual Wpa Kali Linux Hack: Read/DownloadDocument2 paginiManual Wpa Kali Linux Hack: Read/Downloadluiseg0% (1)
- Symmetra PX UPS: Operation and Maintenance ManualDocument42 paginiSymmetra PX UPS: Operation and Maintenance ManualXyrix-i-amÎncă nu există evaluări
- Thesis Topics in Information TechnologyDocument6 paginiThesis Topics in Information Technologyerikanelsonwashington100% (2)
- C C++ Interview Questions AnswersDocument14 paginiC C++ Interview Questions Answersactiveguy_smalÎncă nu există evaluări
- DAX Guidebook UpdatedDocument13 paginiDAX Guidebook Updatedmaria lopezÎncă nu există evaluări
- Domestic Data Entry Operator Syllabus/ CurriculumDocument4 paginiDomestic Data Entry Operator Syllabus/ CurriculumNIVI MEDIA TVÎncă nu există evaluări
- Chapter 6: Questions and AnswersDocument51 paginiChapter 6: Questions and Answersnnbphuong810% (2)
- ACS5000 AD TC SW Troubleshooting ManualDocument47 paginiACS5000 AD TC SW Troubleshooting ManualPrafulla SupekarÎncă nu există evaluări
- 2020 Ol Sinhala Literature Paper Olevelapi PDFDocument3 pagini2020 Ol Sinhala Literature Paper Olevelapi PDFdehemi deekshaÎncă nu există evaluări
- Principles and Applications of The ICL7660 CMOS Voltage Converter PDFDocument10 paginiPrinciples and Applications of The ICL7660 CMOS Voltage Converter PDFPeter JordanÎncă nu există evaluări
- Module Description CPR-041 D 1.0Document17 paginiModule Description CPR-041 D 1.0felipebdÎncă nu există evaluări
- Telemecanique SR2B201BD DatasheetDocument6 paginiTelemecanique SR2B201BD DatasheetRahmat Maulidan MÎncă nu există evaluări
- System Diagrams UMLDocument97 paginiSystem Diagrams UMLdesai_652210782Încă nu există evaluări
- Question and Answer Set of System Analysis andDocument169 paginiQuestion and Answer Set of System Analysis andAnthony Salangsang100% (1)
- MySQL Case StudyDocument3 paginiMySQL Case StudyNguyen Manh TuanÎncă nu există evaluări
- Structured Web Documents in XML: Grigoris Antoniou Frank Van HarmelenDocument109 paginiStructured Web Documents in XML: Grigoris Antoniou Frank Van HarmelenKainat AnsarÎncă nu există evaluări
- Impact Echo: Product Brochure NDT EquipmentDocument2 paginiImpact Echo: Product Brochure NDT EquipmentDilhara WickramaarachchiÎncă nu există evaluări
- Konica 7060 SolutionsDocument103 paginiKonica 7060 Solutionsjhall4363Încă nu există evaluări
- Optical Networking-Cisco CPT - ArtDocument16 paginiOptical Networking-Cisco CPT - Artbalvinder singhÎncă nu există evaluări
- Ibm System X Cog 20080228Document650 paginiIbm System X Cog 20080228Carlos Alberto Bernardino FilhoÎncă nu există evaluări
- Computer SecurityDocument30 paginiComputer SecurityMuhammad AmmarÎncă nu există evaluări
- Java SwingDocument79 paginiJava Swingprafullmathur28100% (1)
- Service 8000 CDocument213 paginiService 8000 CAndrex GarciaÎncă nu există evaluări
- CSC Update LogDocument14 paginiCSC Update LogJuan Carlos Cáceres ReyesÎncă nu există evaluări
- Fun With Buffer Overflow Cheat SheetDocument1 paginăFun With Buffer Overflow Cheat SheetMefistogrÎncă nu există evaluări
- Rajiv Chopra - C Programming - A Self-Teaching Introduction-Mercury Learning & Information (2018) PDFDocument295 paginiRajiv Chopra - C Programming - A Self-Teaching Introduction-Mercury Learning & Information (2018) PDFSydÎncă nu există evaluări
- HMI Scada SolutionsDocument68 paginiHMI Scada SolutionsSadaf MuftiÎncă nu există evaluări
- Serious Games in Humanitarian User Reasearch 2020 SCUK LLST Imaginetic PDFDocument40 paginiSerious Games in Humanitarian User Reasearch 2020 SCUK LLST Imaginetic PDFFressy NugrohoÎncă nu există evaluări