S-ar putea să vă placă și
- Lead-Lag Compensator PDFDocument3 paginiLead-Lag Compensator PDFRaja PatelÎncă nu există evaluări
- Lead Compensator Design Using Root Locus Techniques: ObjectivesDocument5 paginiLead Compensator Design Using Root Locus Techniques: ObjectivesDoodee MohammedÎncă nu există evaluări
- Analytical Phase Lag, Phase Lead and PID Design in Frequency DomainDocument3 paginiAnalytical Phase Lag, Phase Lead and PID Design in Frequency DomainMichael MaysÎncă nu există evaluări
- Temperature Control Waterbath Control System Using PID ControllerDocument5 paginiTemperature Control Waterbath Control System Using PID ControllerReno Sandy YusufÎncă nu există evaluări
- A Simplified Method of Designing A Phase-Lead Compensator To Improve The M-S-D System's Phase MarginDocument3 paginiA Simplified Method of Designing A Phase-Lead Compensator To Improve The M-S-D System's Phase MarginesatjournalsÎncă nu există evaluări
- Lead Lag and Lag-Lead Compensator DesignDocument90 paginiLead Lag and Lag-Lead Compensator DesignSrinathÎncă nu există evaluări
- Controlling of Temperature and Humidity For An InfDocument9 paginiControlling of Temperature and Humidity For An InfAuria RiaÎncă nu există evaluări
- Control System Engineering by Nagoor KaniDocument398 paginiControl System Engineering by Nagoor KaniKR RamanÎncă nu există evaluări
- Design of Lead and Lag CompensatorDocument3 paginiDesign of Lead and Lag CompensatorShiva Bhasker ReddyÎncă nu există evaluări
- Phase Lead and Lag CompensatorDocument8 paginiPhase Lead and Lag CompensatorNuradeen MagajiÎncă nu există evaluări
- Introduction To ICTDocument4 paginiIntroduction To ICTMariel Marfa UnatoÎncă nu există evaluări
- Compensator For Control SystemDocument56 paginiCompensator For Control SystembhaskarÎncă nu există evaluări
- Design of Lag Lead CompensatorDocument16 paginiDesign of Lag Lead CompensatorJacobÎncă nu există evaluări
- Lead Lead Lag CompensatorDocument11 paginiLead Lead Lag CompensatorHakimi BobÎncă nu există evaluări
- Learning AutoCAD PnID 2010-TOCDocument14 paginiLearning AutoCAD PnID 2010-TOCsifoouÎncă nu există evaluări
- MCQ in Calculus Part 1 ECE Board ExamDocument10 paginiMCQ in Calculus Part 1 ECE Board ExamxXx uuÎncă nu există evaluări
- Resident Marine Mammals of Protected Seascape Tanon Strait, Et Al. v. Secretary Angelo ReyesDocument19 paginiResident Marine Mammals of Protected Seascape Tanon Strait, Et Al. v. Secretary Angelo ReyesDenise CruzÎncă nu există evaluări
- Leseprobe - en Proportional Hydraulic Advance Workbook SampleDocument50 paginiLeseprobe - en Proportional Hydraulic Advance Workbook SamplePhuoc Tho TuongÎncă nu există evaluări
- Differential Equations - Introduction PDFDocument35 paginiDifferential Equations - Introduction PDFVincent Allen Corbilla IIÎncă nu există evaluări
- Soil PH Level For Agriculture LandDocument4 paginiSoil PH Level For Agriculture LandVIVA-TECH IJRIÎncă nu există evaluări
- PID Temp. ControllerDocument8 paginiPID Temp. ControllerHowardgfÎncă nu există evaluări
- A Guide For Measuring, Analyzing, and Evaluating Accelerations Recorded During Seakeeping Trials of High-Speed CraftDocument56 paginiA Guide For Measuring, Analyzing, and Evaluating Accelerations Recorded During Seakeeping Trials of High-Speed CraftmalikscribdÎncă nu există evaluări
- Programmable Logic Controllers Basic Level TextbookDocument18 paginiProgrammable Logic Controllers Basic Level TextbookAhmed Shehab AliÎncă nu există evaluări
- Haiwell PLC CatalogueDocument53 paginiHaiwell PLC CatalogueDAFD4432Încă nu există evaluări
- Solutions of Exercises PN381 00137360001303911569Document51 paginiSolutions of Exercises PN381 00137360001303911569Gelu BoneaÎncă nu există evaluări
- Introduction To Control SystemDocument33 paginiIntroduction To Control Systemmarina890416Încă nu există evaluări
- Control Systems Compensator DESIGN Via Root Locus PDFDocument34 paginiControl Systems Compensator DESIGN Via Root Locus PDFm_umair72001100% (2)
- Fundamentals of Spectrum AnalyzerDocument82 paginiFundamentals of Spectrum AnalyzerTrần Châu ThôngÎncă nu există evaluări
- PhycometricsDocument2 paginiPhycometricsHriEngÎncă nu există evaluări
- Manual Cutler HammerDocument114 paginiManual Cutler HammerMarcelo Palacios SantanaÎncă nu există evaluări
- Lag, Lead, Lead-Lag - Compensation in Control SystemDocument11 paginiLag, Lead, Lead-Lag - Compensation in Control SystemShah Jay100% (1)
- Magnetic Proximity SwitchDocument9 paginiMagnetic Proximity SwitchSagar ChachondiaÎncă nu există evaluări
- PLC Study MeterialDocument74 paginiPLC Study MeterialSargunam SankaravadivelÎncă nu există evaluări
- PLC & Scada LabDocument1 paginăPLC & Scada Labhareesh.makesuÎncă nu există evaluări
- Materials Science & Engineering A: Abdelhakim Aldoshan, Sanjeev KhannaDocument8 paginiMaterials Science & Engineering A: Abdelhakim Aldoshan, Sanjeev KhannaelmiraÎncă nu există evaluări
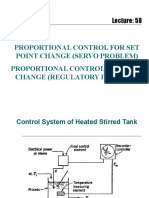
- Proportional Control For Set Point Change (Servo Problem) Proportional Control For Load Change (Regulatory Problem)Document19 paginiProportional Control For Set Point Change (Servo Problem) Proportional Control For Load Change (Regulatory Problem)Imran UnarÎncă nu există evaluări
- Center Crack Problem To Evaluate SIF (Mode-I) Solving Procedure Using Ansys 11 - By: Alfred Franklin.VDocument5 paginiCenter Crack Problem To Evaluate SIF (Mode-I) Solving Procedure Using Ansys 11 - By: Alfred Franklin.VAlfred Franklin V100% (3)
- 2robot Applications Main8Document55 pagini2robot Applications Main8saikumarÎncă nu există evaluări
- Sensors For Handling and Processing TechnologyDocument180 paginiSensors For Handling and Processing TechnologyrezaÎncă nu există evaluări
- EMG 2505 - Measurement and Instrumentation PDFDocument159 paginiEMG 2505 - Measurement and Instrumentation PDFVasda VinciÎncă nu există evaluări
- 01 TP 101pneumatics Work Book Basic LevelDocument200 pagini01 TP 101pneumatics Work Book Basic LevelGF MAÎncă nu există evaluări
- Blood Pressure Meter Schematic RevB PDFDocument4 paginiBlood Pressure Meter Schematic RevB PDFRene Gonzales VasquezÎncă nu există evaluări
- Transducer Basics ModifiedDocument78 paginiTransducer Basics ModifiedAmit RegeÎncă nu există evaluări
- Article 2Document64 paginiArticle 2mark ianÎncă nu există evaluări
- Euler's Critical LoadDocument4 paginiEuler's Critical LoadAscanio BarbosaÎncă nu există evaluări
- Solenoid ValveDocument20 paginiSolenoid ValveMayur GaidhaneÎncă nu există evaluări
- Humidity SensorsDocument33 paginiHumidity SensorsБлагица Петрићевић100% (2)
- BTech ME Curriculum Syllabi 2018Document115 paginiBTech ME Curriculum Syllabi 2018GauthamÎncă nu există evaluări
- Bachelor of Science in Industrial TechnologyDocument11 paginiBachelor of Science in Industrial TechnologyJohn Oyan EstilloreÎncă nu există evaluări
- Literature ReviewDocument11 paginiLiterature ReviewTalha YousufÎncă nu există evaluări
- Motorised Screw JackDocument4 paginiMotorised Screw JackhidaiÎncă nu există evaluări
- Ijcs 35 2 05Document9 paginiIjcs 35 2 05Ari NugrohoÎncă nu există evaluări
- Paternoster 11 Geometric 2Document7 paginiPaternoster 11 Geometric 2Alexandra Elena BalanoiuÎncă nu există evaluări
- Pressure Observer-Controller Design For Pneumatic Cylinder ActuatorsDocument10 paginiPressure Observer-Controller Design For Pneumatic Cylinder ActuatorsSähilDhånkhårÎncă nu există evaluări
- DC Motor Position Control EMDAP CVTDocument11 paginiDC Motor Position Control EMDAP CVTzulfikarzaidÎncă nu există evaluări
- Development of A Wall-Climbing Robot Using A Tracked Wheel Mechanism - KSMEDocument9 paginiDevelopment of A Wall-Climbing Robot Using A Tracked Wheel Mechanism - KSMEWahid HusainÎncă nu există evaluări
- Machine Tool Feed DrivesDocument18 paginiMachine Tool Feed DrivesDoris ParaschivÎncă nu există evaluări
- 1) Effect of Engine Speed On Intake Valve Flow Characteristics of A Diesel EngineDocument6 pagini1) Effect of Engine Speed On Intake Valve Flow Characteristics of A Diesel EnginefitriasyrafÎncă nu există evaluări
- Kom Mte ReportDocument13 paginiKom Mte ReportNamanÎncă nu există evaluări
- Control of DC Motor Using Different Control StrategiesDe la EverandControl of DC Motor Using Different Control StrategiesÎncă nu există evaluări
- 54 - OMV Petrom Road Safety Project - Romania HSE National Conference 2016Document15 pagini54 - OMV Petrom Road Safety Project - Romania HSE National Conference 2016no nameejjÎncă nu există evaluări
- 171adjust Engine HoodDocument2 pagini171adjust Engine Hoodno nameejjÎncă nu există evaluări
- 3.3.2. Fisa de Post - Director GeneralDocument4 pagini3.3.2. Fisa de Post - Director Generalno nameejjÎncă nu există evaluări
- WhatsApp Emergency Disclosure Request For Official Use OnlyDocument1 paginăWhatsApp Emergency Disclosure Request For Official Use Onlyno nameejjÎncă nu există evaluări
- 3.3.2. Fisa de Post - Director GeneralDocument4 pagini3.3.2. Fisa de Post - Director Generalno nameejjÎncă nu există evaluări
- Data SheetDocument116 paginiData Sheetno nameejjÎncă nu există evaluări
- Grundfosliterature 1370Document8 paginiGrundfosliterature 1370no nameejjÎncă nu există evaluări
- D D D D D D: Description/ordering InformationDocument13 paginiD D D D D D: Description/ordering Informationno nameejjÎncă nu există evaluări
- PSM LaboratorDocument23 paginiPSM Laboratorno nameejjÎncă nu există evaluări
- Ultrasound PhysicsDocument9 paginiUltrasound PhysicsawansurfÎncă nu există evaluări
- Tutorials Piezo Basics PDFDocument19 paginiTutorials Piezo Basics PDFsiddharthÎncă nu există evaluări
- Ultrasonic Testing of Materials 133Document1 paginăUltrasonic Testing of Materials 133joÎncă nu există evaluări
- Bladeless Wind Power GenerationDocument4 paginiBladeless Wind Power GenerationInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Full Semester Internship Roject Report: Piezo-Electric Hybrid Shock AbsorberDocument50 paginiFull Semester Internship Roject Report: Piezo-Electric Hybrid Shock AbsorberVarun GuptaÎncă nu există evaluări
- High Frequency Wide Beam PVDF Ultrasonic Projector For Underwater CommunicationsDocument5 paginiHigh Frequency Wide Beam PVDF Ultrasonic Projector For Underwater CommunicationsDi ZhangÎncă nu există evaluări
- Piezo Electric EffectDocument19 paginiPiezo Electric EffectsanjeevÎncă nu există evaluări
- Crystal Oscillator Working: Electronic CircuitDocument3 paginiCrystal Oscillator Working: Electronic CircuitrajeshÎncă nu există evaluări
- Pezoelectric SensorsDocument8 paginiPezoelectric Sensorsernad kovacevicÎncă nu există evaluări
- 2019 CuInP2S6Document10 pagini2019 CuInP2S6Robert Oliva VidalÎncă nu există evaluări
- Guide Notes: Inspection PersonnelDocument48 paginiGuide Notes: Inspection Personnelaneeshta100% (10)
- Ip 2019Document26 paginiIp 2019Danger Zac 9Încă nu există evaluări
- RP 372Document36 paginiRP 372kirandevi1981Încă nu există evaluări
- qt6fg743c8 NosplashDocument178 paginiqt6fg743c8 NosplashMaithreyan SÎncă nu există evaluări
- Use of Piezoelectric Energy Harvesting Devices For Charging BatteriesDocument8 paginiUse of Piezoelectric Energy Harvesting Devices For Charging BatteriesEmmanuel AdamÎncă nu există evaluări
- Medical Physics Course Notes (Greg Pitt)Document92 paginiMedical Physics Course Notes (Greg Pitt)Mel ClancyÎncă nu există evaluări
- Alcohol Detection System in CarsDocument12 paginiAlcohol Detection System in CarsRat.T67% (3)
- SSP 840193. 3.0 Liter V6 TDI. Clean Diesel EngineDocument108 paginiSSP 840193. 3.0 Liter V6 TDI. Clean Diesel EngineFernando García100% (2)
- Datasheet HPI GP6Document2 paginiDatasheet HPI GP6Caio BittencourtÎncă nu există evaluări
- MuraltDocument12 paginiMuraltJezero RozkaÎncă nu există evaluări
- Loop Powered Microprocessor Controlled Positioner: Worcester Control ValvesDocument4 paginiLoop Powered Microprocessor Controlled Positioner: Worcester Control Valveskarim karimÎncă nu există evaluări
- Investigation The Combination of Ultrasound and Electrokinetic As Mechanisms To Enhance Sludge Dewatering - MSC ThesisDocument85 paginiInvestigation The Combination of Ultrasound and Electrokinetic As Mechanisms To Enhance Sludge Dewatering - MSC ThesisDr. Ziad Shakeeb Al SarrafÎncă nu există evaluări
- Introduction, Classification and Applications of Smart Materials: An OverviewDocument6 paginiIntroduction, Classification and Applications of Smart Materials: An OverviewPatel TosifÎncă nu există evaluări
- Lumped or Distributed Parameter SystemsDocument2 paginiLumped or Distributed Parameter SystemsganeshÎncă nu există evaluări
- Structure and Electrical Properties of Iro - Doped 0.5ba Ca Tio - 0.5bati ZR O Ceramics Via Low-Temperature SinteringDocument8 paginiStructure and Electrical Properties of Iro - Doped 0.5ba Ca Tio - 0.5bati ZR O Ceramics Via Low-Temperature SinteringSamah SamahÎncă nu există evaluări
- Piezocomposite Transducer DesignDocument15 paginiPiezocomposite Transducer Designvish88100% (2)
- Piezoelectric and Upconversion Emission Properties of Er - Doped 0.5ba (ZR Ti) O - 0.5 (Ba Ca) Tio CeramicDocument6 paginiPiezoelectric and Upconversion Emission Properties of Er - Doped 0.5ba (ZR Ti) O - 0.5 (Ba Ca) Tio CeramicSamah SamahÎncă nu există evaluări
- Piezoelectricity A Literature Review For Power GenDocument6 paginiPiezoelectricity A Literature Review For Power GenAntonette JanorasÎncă nu există evaluări
- BS 3683-4-1985Document18 paginiBS 3683-4-1985Jithu KareemÎncă nu există evaluări
- Valve For Bosch Piezoelectric InjectorsDocument4 paginiValve For Bosch Piezoelectric InjectorsKammoeÎncă nu există evaluări