Documente Academic
Documente Profesional
Documente Cultură
861587772.T9 - Analisis y Diseño de Sistemas de Control A Lazo Cerrado
Încărcat de
cristofromanovTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
861587772.T9 - Analisis y Diseño de Sistemas de Control A Lazo Cerrado
Încărcat de
cristofromanovDrepturi de autor:
Formate disponibile
Control Automtico Ing. Elctrica F.R.
Tucumn Universidad Tecnolgica Nacional
Pgina 1 de 17 Ing. Juan Jess Luna
Unidad Temtica 9: Anlisis y Diseo de Sistemas de Control a Lazo Cerrado
Algoritmos de Control: Un algoritmo de control se encarga de monitorear el valor de la seal de salida del sistema de control (variable controlada) y compararla con la seal de referencia, con lo que calcula la seal de error, que pasa por una serie de reglas de control para calcular el valor de la seal de salida del controlador con la finalidad de ajustar la variable controlada lo mas cerca del valor deseado posible.
S.P. = Set Point = Valor de Referencia V.m. = Valor Medido E.F.C. = Elemento Final de Control o Actuador El algoritmo de control define la forma en que: 1 Se detecta el error. (Casi siempre es igual en todos los algoritmos) 2 Las reglas de control se aplican al error detectado. 3 Se calcula la seal de salida del controlador. Los algoritmos de control principalmente usados son: 1 ON/OFF (Todo o Nada) en sus diversas variantes. 2 Proporcional (P). 3 Proporcional + Integral (PI). 4 Proporcional + Derivativo (PD). 5 Proporcional + Integral + Derivativo (PID). 6 Adelanto de Fase. 7 - Atraso de Fase. El Control ON-OFF: Es la forma ms simple de controlar. Es comnmente utilizado en la industria por la razn anterior. Muestra muchos de los criterios fundamentales inherentes a todas las soluciones de control. Cumple solo el objetivo de estabilizacin. Los hay en muchas variantes, pero los principales son dos: De 2 posiciones u On-Off Simple. De 3 posiciones o Heat and Cool.
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional Control On-Off de 2 Posiciones:
Pgina 2 de 17 Ing. Juan Jess Luna
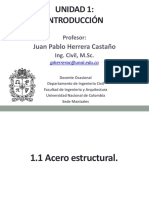
1 Se dispone de Elemento Final de Control (EFC) que tiene solo 2 modos, encendido o apagado. Ejemplo de esto puede ser un elemento calefactor. 2 Establece un rango de operacin: Limite Inferior de Control (LIC) Limite Superior de Control (LSC) 3 Las reglas son: - Si el valor de la variable a controlar esta entre (LIC y LSC) mantener el estado actual del EFC. - Si el valor de la variable a controlar esta por encima del rango de operacin (LIC y LSC) encender/Apagar el EFC. - Si el valor de la variable a controlar esta por debajo del rango de operacin (LIC y LSC) apagar/Encender el EFC. 4 La diferencia en tiempo entre las transiciones de un estado a otro del EFC se conoce como Histresis y es muy necesario que exista para la vida til del EFC. 5 El EFC se encender o apagar segn si la accin de este sobre la variable a controlar sea directa o inversa. Ejemplo: Control de Temperatura mediante un calefactor manipulado por un rel activado desde un pin de un microcontrolador.
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional Ejemplo: dem anterior pero con poca Histresis:
Pgina 3 de 17 Ing. Juan Jess Luna
De lo anterior se observa que cuando el nivel de histresis crece, la frecuencia de cambio de la seal de entrada decrece, pero la amplitud de las oscilaciones de la salida crece. En el diseo debe existir un compromiso entre el ajuste de la regulacin de la temperatura y el precio que se paga en trminos de velocidad de cambio de la entrada. Este tipo de compromisos son los que aparecen en todos los diseos de control. Control On-Off de 3 Posiciones: 1 Se dispone de 2 EFC que tienen solo 2 modos, encendido o apagado. Ejemplo de esto puede ser un elemento calefactor y un ventilador. 2 Establece un rango de operacin: - Limite Inferior de Control (LIC) - Limite Superior de Control (LSC) 3 Las reglas son: - Si el valor de la variable a controlar esta entre (LIC y LSC) mantener el Estado actual de cada EFC. - Si el valor de la variable a controlar esta por encima del rango de operacin (LIC y LSC) encender el EFC de accin inversa y apagar el EFC de accin directa. - Si el valor de la variable a controlar esta por debajo del rango de operacin (LIC y LSC) apagar el EFC de accin inversa y encender el EFC de accin directa. Suponga una estacin flotante de perforacin en el mar en la que se tiene 2 motores A y B, el A se activar cuando la estacin se mueva al Este de la posicin deseada y se apagar cuando se recupere el equilibrio. El motor B se activar cuando la estacin se mueva al este de la posicin deseada y se apagar cuando se recupere el equilibrio. Es obvio que no se debe encender ambos motores al mismo tiempo.
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional
Pgina 4 de 17 Ing. Juan Jess Luna
El Control Proporcional: El Controlador Proporcional genera a la salida una seal de control que es proporcional a la seal de error. De este modo:
Con lo cual, la Funcin de Transferencia del control proporcional es:
Donde: e(t) es la seal de error m(t) es la seal de salida del controlador K es la Ganancia Proporcional El Controlador es solo un elemento de ganancia que se puede implementar fsicamente a partir de un Amplificador Operacional si se trata de un sistema basado en electrnica analgica. La salida del Controlador es una expresin proporcional al error actuante en el momento en que se analiza el sistema. En los sistemas reales, la ganancia constante solo existe en un rango de valores del error, a esto se le llama Banda Proporcional.
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional
Pgina 5 de 17 Ing. Juan Jess Luna
Para errores fuera de la banda Proporcional, se presenta un corte de saturacin de la salida, la cual obedece a la capacidad instalada del sistema implementado, por ejemplo las tensiones de alimentacin de un amplificador operacional. Cuanto mayor es la ganancia del control proporcional, mayor es la seal de control generada para un mismo valor de seal de error. De este modo, se puede decir que para una seal de control determinada cuanto mayor es la ganancia del control proporcional, menor es la seal de error actuante. En conclusin, el aumento de la ganancia del control proporcional permite reducir el error en estado estacionario.
Lo anterior tiene 2 consecuencias: 1 El error no se puede eliminar (ess=0) con solo la accin proporcional. Esto se comprueba al observar la expresin del error estacionario de posicin de un sistema tipo 0:
Lo que requerira para ess=0 que K sea infinito y esto es imposible de implementar.
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional Esto se puede generalizar para los otros errores.
Pgina 6 de 17 Ing. Juan Jess Luna
2 La reduccin del error estacionario no es gratis, se desmejora el desempeo y como se ha visto, tambin disminuye la estabilidad marginal del sistema. Al aumentar la accin proporcional se desmejora el desempeo:
Ejemplo: Control de Caudal:
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional
Pgina 7 de 17 Ing. Juan Jess Luna
El Control Proporcional Integral (P+I): En este algoritmo se incluye adems de la accin P, la accin Integral (I). En el control Integral o de accin I, la salida del controlador se calcula como la integral del error:
La caracterstica mas importante de este tipo de control es que la accin correctora se efecta mediante la integral del error, o sea, el rea bajo la curva de error en los tiempos anteriores al que se este estudiando. Ello permite decir que el control integral proporciona una seal de control que es funcin de la propia historia de la seal de error. El control integral permite obtener error estacionario nulo en un sistema de control mediante la introduccin de un elemento integrador en la funcin de transferencia de lazo abierto. En el control integral o de accin I, la salida del controlador se calcula como la integral del error, o sea, el rea bajo la curva del error en los tiempos anteriores al que se este estudiando. En las graficas se observa el caso de un sistema de control de la posicin (en grados) de un brazo robot, la primera grafica es el error y la segunda es la salida del controlador, donde el torque aplicado al brazo es la variable manipulada:
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional
Pgina 8 de 17 Ing. Juan Jess Luna
Un controlador nunca se implementa solo con accin integral, pues aunque es capaz de eliminar el error estacionario, desmejora el desempeo al reducir la estabilidad marginal. Es por ello que se implementa al menos con la accin proporcional, quedando el controlador as:
Donde Ti es el tiempo integral.
El modo de lograr este objetivo es situar el cero del proporcional integral lo mas cercano posible al origen. De esta manera el polo en lazo cerrado originado por el aumento del orden del sistema se anulara con el cero del proporcional integral que es un cero en lazo cerrado del sistema, efectundose una cancelacin polo-cero. Pudindose, entonces, aproximar el sistema controlado por proporcional integral al sistema inicial con control proporcional.
Este algoritmo tiene las siguientes caractersticas: 1 Mejora el desempeo en rgimen estacionario. 2 Filtra las componentes de alta frecuencia, pero no mejora el desempeo en rgimen transitorio. 3 Mejora la estabilidad relativa o marginal. 4 Reduce el Ancho de Banda.
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional Sintonizacin de Controladores PI
Pgina 9 de 17 Ing. Juan Jess Luna
Es evidente que cualquier parmetro Kp y Ti no sirven para obtener una respuesta satisfactoria del sistema. Se deben obtener los valores mas adecuados para los parmetros, y estos valores dependern de las caractersticas de la planta. El proceso mediante el cual se calculan los valores de los parmetros del controlador recibe el nombre de sintona. El mtodo ms rudimentario de sintona es prueba y error, consistente en: 1 Dar un valor elevado a Ti (por ejemplo 100 minutos) de forma que a efectos prcticos, el controlador PI se comporte como P. 2 Ajustar Kp hasta obtener la forma de respuesta deseada, sin tener en cuenta el ess. 3 Disminuir poco a poco Ti hasta el mnimo posible, de forma que se anule el ess pero manteniendo la forma de respuesta deseada. Es decir, debe buscarse el mnimo valor de Ti que no afecte de forma significativa al coeficiente de amortiguamiento. El Control Proporcional Derivativo (P+D) En este algoritmo se incluye adems de la accin P, la accin Derivativa (D). En el control derivativo, la accin de control derivativa genera una seal de control proporcional a la derivada de la seal de error.
De este modo, el control derivativo mediante la derivada de la seal de error conoce sus caractersticas dinmicas (crecimiento o decrecimiento), produciendo una correccin antes de que las seal de error sea excesiva. A este efecto se le denomina accin anticipativa.
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional
Pgina 10 de 17 Ing. Juan Jess Luna
Sin embargo, el control derivativo no puede utilizarse en solitario porque es incapaz de responder a una seal de error constante, puesto que la derivada de una constante es cero. Por esto se implementa con la accin P de la forma siguiente:
Donde Td se llama Tiempo derivativo y:
El control proporcional derivativo proporciona al sistema una mayor estabilidad relativa que se traduce en una respuesta transitoria con menor sobreimpulso. Sin embargo, cuando la influencia del control es muy grande, el sistema de control tiende a ofrecer una respuesta excesivamente lenta. Este algoritmo tiene las siguientes caractersticas: 1 Mejora el desempeo en rgimen transitorio. 2 Aumenta la velocidad de respuesta, lo que se observa en la reduccin de los tiempos de crecimiento y retardo. 3 Lo anterior lo logra porque aumenta el Ancho de Banda, lo que permite la incorporacin de componentes de alta frecuencia. 4 Un tiempo derivativo puede producir un aumento del ruido y aparicin de rizos en la respuesta. Sintonizacin de Controladores PD La sintonizacin de un controlador PD es difcil y su uso no esta muy extendido en el mbito industrial, principalmente porque esta desaconsejada cuando los procesos se asemejan a sistemas de primer orden (la mayora), en presencia de grandes retardos y cuando la salida esta afectada por ruido (situacin muy comn en el entorno industrial donde las seales suelen ser de carcter elctrico). No obstante, el procedimiento ms simple (prueba y error) es el siguiente: 1 Eliminar la accin derivativa (Td=0) y ajustar Kp hasta conseguir la forma de onda deseada. 2 Aumentar la Kp conseguida e intentar restaurar la respuesta ajustando Td. Repetir hasta conseguir un valor Kp tan grande como sea posible. El Control Proporcional Integral Derivativo (P+I+D) Consiste en la implementacin simultnea de las 3 acciones. Hay varias formas de representarlo, la ms comn es el PID posicional:
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional
Pgina 11 de 17 Ing. Juan Jess Luna
Que se conoce como la forma paralelo del algoritmo PID y su Funcin de Transferencia es:
Esta forma tiene otro diagrama de bloques equivalente:
Cualquiera que sea, es importante resaltar que al desarrollar la Funcin de Transferencia del controlador se presentan 2 ceros y 1 polo en el origen:
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional
Pgina 12 de 17 Ing. Juan Jess Luna
Un ejemplo de control PID basado en electrnica analgica puede ser:
Sintonizacin de Controladores PID: Hay varios mtodos. Mtodo de la curva de reaccin (Ziegler-Nichols 1942) En este mtodo de sintonizacin se determinan las caractersticas dinmicas del proceso a controlar, a partir de la respuesta del sistema en lazo abierto. Una vez que se tienen estas caractersticas es posible obtener los parmetros del controlador. La caracterizacin del proceso es como sigue: la planta en lazo abierto es excitada con una funcin escaln y se obtiene su respuesta, tenindose en este caso una curva como se muestra en la siguiente figura.
En esta curva se determina el punto de inflexin y sobre l se traza una recta tangente a la curva. Esta recta intersecta al eje de tiempo (eje horizontal) y el tiempo muerto que caracteriza al proceso se mide desde el origen hasta este punto de interseccin, como se
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional
Pgina 13 de 17 Ing. Juan Jess Luna
muestra. El otro parmetro que se requiere para la sintonizacin es la pendiente de la recta tangente a la respuesta graficada. Las formulas de sintonizacin estn en la siguiente tabla:
Tm: es el periodo de oscilacin de la respuesta a escaln del sistema realimentado para las condiciones especificadas.
El Control por Adelanto de Fase: La Funcin de Transferencia de un controlador de Adelanto de Fase es:
Donde pi > zi Lo que se busca con esta F. de T. es la de producir un corrimiento de fase positivo, es decir, aumentar el margen de Fase de un sistema al cual se le conecta esta red en cascada. Si se observa la respuesta en frecuencia de la red en adelanto de fase se aprecia fcilmente que se trata de un filtro Pasa Alto. Si se observa la respuesta en el tiempo se aprecia que esta red mejora la velocidad de respuesta, no afecta el error en estado estable y que incrementa el amortiguamiento. La F. de T. generalizada del compensador de adelanto de fase para efectos de diseo es como sigue:
Donde: Kc es la ganancia del compensador necesaria para no afectar la magnitud del sistema a controlar. a es el factor de atenuacin que determina la distancia entre zi y pi. T es el factor de alejamiento de zi y pi desde el origen.
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional El diagrama de bloques equivalente a este compensador seria:
Pgina 14 de 17 Ing. Juan Jess Luna
Usualmente Kc a se presenta como un solo elemento de ganancia Kdc que se especifica segn el tipo de error estacionario que se desea corregir. Para mejores resultados: - Acercar zi al origen mejora Tr y Ts pero si se acerca demasiado aumenta Mp. - Alejar pi del origen y del zi mejora Mp.
El efecto del compensador de adelanto se observa si se analiza la respuesta en frecuencia y se ve que el compensador es un filtro Paso Alto con una fase mxima y este ocurre a una frecuencia que ser donde se quiere ubicar el nuevo cruce de ganancia del sistema compensado.
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional
Pgina 15 de 17 Ing. Juan Jess Luna
El compensador de adelanto de fase aade un polo y un cero donde el cero esta ms a la derecha del polo y el efecto general es reducir los tiempos de respuesta Tr y Ts. La fase de la trayectoria directa del sistema en el nuevo cruce de ganancia se incrementa gracias a la fase mxima que incorpora el compensador. Esto mejora el Margen de Fase. La pendiente de la curva de magnitud en las cercanas del cruce de ganancia se reduce lo que mejora la estabilidad relativa del sistema. El Ancho de Banda del sistema se incrementa por lo que se mejora la velocidad de respuesta. El Control por Atraso de Fase La Funcin de Transferencia de un controlador de Atraso de Fase es:
Donde pi < zi Lo que se busca con esta F. de T. es la de producir un corrimiento de fase, es decir, aumentar el margen de Fase de un sistema al cual se le conecte esta red en cascada. Si se observa la respuesta en frecuencia de la red de atraso de fase se aprecia fcilmente que se trata de un filtro Paso Bajo. Si se observa la respuesta en el tiempo se aprecia que esta red desmejora la velocidad de respuesta, afecta el error en estado estable. La F. de T. generalizada del compensador de atraso de fase para efectos de diseo es como sigue:
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional
Pgina 16 de 17 Ing. Juan Jess Luna
Donde: Kc es la ganancia del compensador necesaria para no afectar la magnitud del sistema a controlar. a es el factor de atenuacin que determina la distancia entre zi y pi. T es el factor de alejamiento de zi y pi desde el origen. El diagrama de bloques equivalente a este compensador seria:
Donde:
Para mejores resultados: - El polo y el cero deben estar muy cercanos. - Ambos deben estar lo mas cerca posible del origen.
El efecto del compensador de atraso de fase se observa si se analiza la respuesta en frecuencia y se ve que el compensador es un filtro Paso Bajo con una fase minima y este ocurre a una frecuencia que ser donde se quiere ubicar el nuevo cruce de ganancia del sistema compensado.
Control Automtico Ing. Elctrica F.R. Tucumn Universidad Tecnolgica Nacional
Pgina 17 de 17 Ing. Juan Jess Luna
El compensador de atraso de fase aade un polo y un cero donde el cero esta ms a la izquierda del polo y el efecto general es aumentar los tiempos de respuesta Tr y Ts. La fase de la trayectoria directa del sistema en el nuevo cruce de ganancia se incrementa gracias a la fase minima que incorpora el compensador en el cruce de ganancia. Esto mejora el margen de Fase. El Ancho de Banda del sistema se reduce por lo que se desmejora la velocidad de respuesta. El error esttico no se modifica con el polo y el cero.
S-ar putea să vă placă și
- Taller 1 QuimicaDocument3 paginiTaller 1 QuimicaJorge Wilson OcampoÎncă nu există evaluări
- TRABAJO MECANICO I y IIDocument3 paginiTRABAJO MECANICO I y IIRamiro DominguezÎncă nu există evaluări
- Propiedades de La MateriaDocument1 paginăPropiedades de La MateriaLuz Marina Lozada RodriguezÎncă nu există evaluări
- Vivah - Ip1776es DitecDocument18 paginiVivah - Ip1776es DitecAdolfo SanzÎncă nu există evaluări
- Tarea de Simulacion 4ADocument4 paginiTarea de Simulacion 4Aisaac gonzalezÎncă nu există evaluări
- Manual Reparación ECUsDocument109 paginiManual Reparación ECUsjemaliz92% (36)
- IntroducciónDocument49 paginiIntroducciónJeisson Ricardo Villarreal EstradaÎncă nu există evaluări
- Diferencias Entre Granallado y ArenadoDocument1 paginăDiferencias Entre Granallado y ArenadoMirian Lisseth Ttito ChoqueÎncă nu există evaluări
- Filaleteo - El Secreto Del Elixir de La InmortalidadDocument5 paginiFilaleteo - El Secreto Del Elixir de La InmortalidadVericuetoMental100% (3)
- Reporte04 CBA 2020 1Document19 paginiReporte04 CBA 2020 1Aron Benito Pari MachacuayÎncă nu există evaluări
- Practica Catálisis ÁcidaDocument9 paginiPractica Catálisis Ácidacralex22Încă nu există evaluări
- Plan de Asignatura Fisicoquimica.Document8 paginiPlan de Asignatura Fisicoquimica.Jose OlivellaÎncă nu există evaluări
- Identificación de Fuentes y Residuos RadiactivosDocument160 paginiIdentificación de Fuentes y Residuos Radiactivosespirilo1659Încă nu există evaluări
- Andrie Marie AmpereDocument3 paginiAndrie Marie AmpereVeraly CoradoÎncă nu există evaluări
- b1 Mcs U10 Derivadas Ev SM SolDocument2 paginib1 Mcs U10 Derivadas Ev SM SolPeloteros EscarabajosÎncă nu există evaluări
- Quimica PreDocument3 paginiQuimica PremiguelÎncă nu există evaluări
- Cascarilla LadrilloDocument10 paginiCascarilla LadrilloMaria ElenaÎncă nu există evaluări
- Evaluación DiagnósticaDocument10 paginiEvaluación Diagnósticaantonio leyvaÎncă nu există evaluări
- Termodinamica 7Document11 paginiTermodinamica 7Matías De León Jimenez100% (1)
- Problema Diagramas de FlujoDocument7 paginiProblema Diagramas de Flujonauj999Încă nu există evaluări
- Guia - Dinámica CircularDocument5 paginiGuia - Dinámica CircularJacques Trigo ArceÎncă nu există evaluări
- FonocardiogramaDocument8 paginiFonocardiogramaMoises Tapia BaezÎncă nu există evaluări
- Campo MagnéticoDocument18 paginiCampo MagnéticoalpiÎncă nu există evaluări
- Tarjeta de Banda MagneticaDocument11 paginiTarjeta de Banda MagneticaJulian RodriguezÎncă nu există evaluări
- Elabore Un ExperimentoDocument11 paginiElabore Un ExperimentoJoshua BrianoÎncă nu există evaluări
- Proceso de Refinacion de AzucarDocument68 paginiProceso de Refinacion de AzucarWalter Mamani Ccasa83% (6)
- Informe Proyecto CircuitosDocument19 paginiInforme Proyecto CircuitosHenry AlvaradoÎncă nu există evaluări
- Relleno FluidoDocument6 paginiRelleno FluidogertyyÎncă nu există evaluări
- ELASTICIDAD LAbORATORIODocument14 paginiELASTICIDAD LAbORATORIODanae MilagrosÎncă nu există evaluări