S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- SSP 419 The Scirocco 2009Document52 paginiSSP 419 The Scirocco 2009francois.garcia31100% (1)
- Beyma 2009 DesignsDocument22 paginiBeyma 2009 DesignsFernando CostaÎncă nu există evaluări
- Huawei Active Antennas Design Guideline v05 VF-ESDocument35 paginiHuawei Active Antennas Design Guideline v05 VF-ESestebanarca100% (2)
- Network Analysis-Measurement Science Poster 2018 2Document1 paginăNetwork Analysis-Measurement Science Poster 2018 2joaomsonÎncă nu există evaluări
- Powerso16: Outline and Mechanical DataDocument1 paginăPowerso16: Outline and Mechanical DataDan EsentherÎncă nu există evaluări
- Powerso-10 Mechanical Data: Dim. Mm. Inch Min. Typ Max. Min. Typ. MaxDocument1 paginăPowerso-10 Mechanical Data: Dim. Mm. Inch Min. Typ Max. Min. Typ. MaxDan EsentherÎncă nu există evaluări
- Powerso-20 Mechanical Data: Dim. Mm. Inch Min. TYP Max. Min. Typ. MaxDocument1 paginăPowerso-20 Mechanical Data: Dim. Mm. Inch Min. TYP Max. Min. Typ. MaxDan EsentherÎncă nu există evaluări
- PSSO-12 Mechanical Data: Dim. Mm. Min. TYP MaxDocument1 paginăPSSO-12 Mechanical Data: Dim. Mm. Min. TYP MaxDan EsentherÎncă nu există evaluări
- Hiquad 64Document1 paginăHiquad 64Dan EsentherÎncă nu există evaluări
- Pso 36Document1 paginăPso 36Dan EsentherÎncă nu există evaluări
- Powersso-24 Mechanical Data: Dim. Mm. Min. Typ MaxDocument1 paginăPowersso-24 Mechanical Data: Dim. Mm. Min. Typ MaxDan EsentherÎncă nu există evaluări
- Multipowerso-30 Mechanical Data: Dim. Mm. Min. Typ MaxDocument1 paginăMultipowerso-30 Mechanical Data: Dim. Mm. Min. Typ MaxDan EsentherÎncă nu există evaluări
- 10831Document21 pagini10831Dan EsentherÎncă nu există evaluări
- L9929Document3 paginiL9929Dan EsentherÎncă nu există evaluări
- 10832Document26 pagini10832Dan EsentherÎncă nu există evaluări
- Ppak Mechanical Data: Dim. Min. TYP MaxDocument1 paginăPpak Mechanical Data: Dim. Min. TYP MaxDan EsentherÎncă nu există evaluări
- VNQ830A-E: Quad Channel High Side DriverDocument17 paginiVNQ830A-E: Quad Channel High Side DriverDan EsentherÎncă nu există evaluări
- Fully Integrated H-Bridge Motor Driver: VNH3SP30Document26 paginiFully Integrated H-Bridge Motor Driver: VNH3SP30Dan EsentherÎncă nu există evaluări
- 10311Document23 pagini10311Dan Esenther100% (1)
- Uh 30Document10 paginiUh 30Dan EsentherÎncă nu există evaluări
- 10683Document19 pagini10683Dan EsentherÎncă nu există evaluări
- 10830Document21 pagini10830Dan EsentherÎncă nu există evaluări
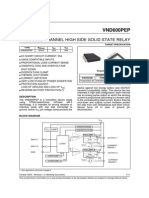
- VND830PEP-E: Double Channel High Side DriverDocument13 paginiVND830PEP-E: Double Channel High Side DriverDan EsentherÎncă nu există evaluări
- 10640Document22 pagini10640Dan EsentherÎncă nu există evaluări
- 10303Document5 pagini10303Dan EsentherÎncă nu există evaluări
- 10302Document4 pagini10302Dan EsentherÎncă nu există evaluări
- 10022Document262 pagini10022Dan EsentherÎncă nu există evaluări
- 9927Document11 pagini9927Dan EsentherÎncă nu există evaluări
- 10261Document10 pagini10261Dan EsentherÎncă nu există evaluări
- 9696Document17 pagini9696Dan EsentherÎncă nu există evaluări
- 9933Document11 pagini9933Dan EsentherÎncă nu există evaluări
- 9792Document21 pagini9792Dan EsentherÎncă nu există evaluări
- 9938Document11 pagini9938Dan EsentherÎncă nu există evaluări
- SMPS Application NotesDocument4 paginiSMPS Application Notesalguien1972Încă nu există evaluări
- Voicetone Mic Mechanic: Take Control of Your Vocal Sound!Document2 paginiVoicetone Mic Mechanic: Take Control of Your Vocal Sound!satiiishwwÎncă nu există evaluări
- 21WHS3BN Tda9381Document59 pagini21WHS3BN Tda9381Luís Francisco PérezÎncă nu există evaluări
- EC6411 CircuitsSimulation LABDocument98 paginiEC6411 CircuitsSimulation LABJ.Gowri ShankarÎncă nu există evaluări
- 01 - RN33211EN40GLA1 - RU40 Release Hands-On Workshop PDFDocument375 pagini01 - RN33211EN40GLA1 - RU40 Release Hands-On Workshop PDFakulwaÎncă nu există evaluări
- LG ML041B Chassis RM17LZ50 LCD TV SM PDFDocument35 paginiLG ML041B Chassis RM17LZ50 LCD TV SM PDFAnderson DuarteÎncă nu există evaluări
- Delay in VLSIDocument27 paginiDelay in VLSIlevan100% (1)
- EE537 Advanced Power System Protection DR C BoothDocument10 paginiEE537 Advanced Power System Protection DR C BoothRajendra Prasad ShuklaÎncă nu există evaluări
- Analog Project: Comparator Circuit As Low Voltage DetectorDocument7 paginiAnalog Project: Comparator Circuit As Low Voltage DetectorShalini JainÎncă nu există evaluări
- KETB Certificate Ceremony BookletDocument15 paginiKETB Certificate Ceremony BookletLindsey O'BrienÎncă nu există evaluări
- GP1A30R: OPIC Photointerrupter With Encoder FunctionDocument4 paginiGP1A30R: OPIC Photointerrupter With Encoder FunctionnospherathusÎncă nu există evaluări
- MPEG and DVB EssentialsDocument2 paginiMPEG and DVB Essentialsparag_ingle123Încă nu există evaluări
- L9338MDDocument9 paginiL9338MDroozbehxoxÎncă nu există evaluări
- Manual Sharp CMS-R600XDocument64 paginiManual Sharp CMS-R600Xjca16100% (1)
- Low Power Design Techniques and Implementation Strategies Adopted in VLSI CircuitsDocument4 paginiLow Power Design Techniques and Implementation Strategies Adopted in VLSI CircuitsCHARANÎncă nu există evaluări
- Electronics Interview Questions and AnswersDocument2 paginiElectronics Interview Questions and Answersishika biswasÎncă nu există evaluări
- Design and Analysis of Low Power Johnson Counter With Improved Performance Using MT-CMOS and Clock GatingDocument4 paginiDesign and Analysis of Low Power Johnson Counter With Improved Performance Using MT-CMOS and Clock GatingIJSTEÎncă nu există evaluări
- 4538B Data SheetDocument10 pagini4538B Data SheetpandaypiraÎncă nu există evaluări
- Frost Sullivan Smart City DefinitionDocument3 paginiFrost Sullivan Smart City DefinitionPepe JeansÎncă nu există evaluări
- BK4802N - IC Radio PDFDocument19 paginiBK4802N - IC Radio PDFpatolin_123Încă nu există evaluări
- SiSonic Design GuideDocument30 paginiSiSonic Design Guidekarthikp94Încă nu există evaluări
- Ten Practical Principles For PhotojournalistsDocument3 paginiTen Practical Principles For PhotojournalistsRichard BalonglongÎncă nu există evaluări
- LM324 Data SheetDocument9 paginiLM324 Data SheetS.v. NagaRajÎncă nu există evaluări
- Communication Lecture Notes Sec 1Document12 paginiCommunication Lecture Notes Sec 1Rushanth JeyaramÎncă nu există evaluări
- 13.8V 40A Power Supply Schematic PrintsDocument11 pagini13.8V 40A Power Supply Schematic PrintsDrew AlbaneseÎncă nu există evaluări
- Philips Mcd288 Ver 1 1 Service Manual PDFDocument39 paginiPhilips Mcd288 Ver 1 1 Service Manual PDFPablo De Jesus Aguirre LeivaÎncă nu există evaluări