S-ar putea să vă placă și
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe la EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasEvaluare: 2.5 din 5 stele2.5/5 (3)
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311De la EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Evaluare: 4.5 din 5 stele4.5/5 (2)
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)De la EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Evaluare: 2 din 5 stele2/5 (1)
- UF0902 - Caracterización de instalaciones de climatizaciónDe la EverandUF0902 - Caracterización de instalaciones de climatizaciónEvaluare: 5 din 5 stele5/5 (1)
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoDe la EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoEvaluare: 5 din 5 stele5/5 (1)
- Control y verificación de productos fabricados. FMEE0108De la EverandControl y verificación de productos fabricados. FMEE0108Încă nu există evaluări
- Eficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108De la EverandEficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108Încă nu există evaluări
- Optimizacion Lazos de Control ABB GuíaDocument98 paginiOptimizacion Lazos de Control ABB GuíaEduardo Sandoval100% (2)
- UF1129 - Costes de los procesos de mecanizadoDe la EverandUF1129 - Costes de los procesos de mecanizadoÎncă nu există evaluări
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108De la EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Încă nu există evaluări
- MF1182_3 - Organización y gestión de los procesos de mantenimiento de las instalaciones eléctricas en el entorno de edificios y con fines especialesDe la EverandMF1182_3 - Organización y gestión de los procesos de mantenimiento de las instalaciones eléctricas en el entorno de edificios y con fines especialesÎncă nu există evaluări
- Controladores PIDDocument10 paginiControladores PIDAlvaroA.DavilaÎncă nu există evaluări
- Acción de Control de Dos Posiciones o de Encendido y ApagadoDocument5 paginiAcción de Control de Dos Posiciones o de Encendido y ApagadoEvelyn ArredondoÎncă nu există evaluări
- Acta Constitutiva - Project CharterDocument4 paginiActa Constitutiva - Project CharterIsaias Gallegos0% (1)
- Informe de Controladores PIDDocument20 paginiInforme de Controladores PIDfranco_3210_Încă nu există evaluări
- Informe de Energía SolarDocument20 paginiInforme de Energía SolarEl Nuevo DíaÎncă nu există evaluări
- MedicionDeGasRev3 0Document71 paginiMedicionDeGasRev3 0Anonymous KICu4PlZrU100% (2)
- Control Avanzado de ProcesosDocument94 paginiControl Avanzado de ProcesosSergio RefolioÎncă nu există evaluări
- Carburador PDFDocument102 paginiCarburador PDFOscar Vera100% (1)
- Métodos de Sintonización en Un Lazo de ControlDocument13 paginiMétodos de Sintonización en Un Lazo de ControlayskelÎncă nu există evaluări
- PIDDocument40 paginiPIDAlexisVizueteÎncă nu există evaluări
- Predictivo Adaptativo RobustoDocument24 paginiPredictivo Adaptativo RobustoGeorgeMarrinesÎncă nu există evaluări
- Practica 1 Tercer Parcial PID AnalogicoDocument14 paginiPractica 1 Tercer Parcial PID AnalogicoDiego MartinezÎncă nu există evaluări
- Lab02 - Sintonía Método de Ganania LímiteDocument5 paginiLab02 - Sintonía Método de Ganania LímiteLuis BarrientosÎncă nu există evaluări
- Fundamentos de Control Predictivo de Procesos Instrumentación y Control de ProcesosDocument7 paginiFundamentos de Control Predictivo de Procesos Instrumentación y Control de ProcesosEdgar HuancaÎncă nu există evaluări
- Unidad4 - Seleccion de Controlador 4.3Document14 paginiUnidad4 - Seleccion de Controlador 4.3Israel BarcenasÎncă nu există evaluări
- Sintonizadores de ControlDocument22 paginiSintonizadores de ControlJulian Gonzalez100% (1)
- Practica 6 (Control)Document16 paginiPractica 6 (Control)May CepÎncă nu există evaluări
- Laboratorio 2 - Controladores de ProcesosDocument6 paginiLaboratorio 2 - Controladores de Procesosgeiner peraltaÎncă nu există evaluări
- Wilsonarevalo Tarea1Document24 paginiWilsonarevalo Tarea1Jonathan Lozano CastilloÎncă nu există evaluări
- LAB-IV-06 Laboratorio de Ingeniería Química IIDocument8 paginiLAB-IV-06 Laboratorio de Ingeniería Química IIDavid Tovar HernándezÎncă nu există evaluări
- Paso 4 Grupo 12Document17 paginiPaso 4 Grupo 12Arturo Carlos100% (1)
- Lab2 - Control AvanzadoDocument21 paginiLab2 - Control AvanzadoRicardo Castro MartinezÎncă nu există evaluări
- 203041A 764 Fase2 "Consolidado"Document17 pagini203041A 764 Fase2 "Consolidado"Esneyder QuevedoÎncă nu există evaluări
- Informe - Laboratorio N°2Document22 paginiInforme - Laboratorio N°2JUAN DANIEL VASQUEZ RENGIFOÎncă nu există evaluări
- Proyecto Control ClasicoDocument13 paginiProyecto Control ClasicoRichard DelgadoÎncă nu există evaluări
- Informe #1 de Control de Procesos (Terminado)Document16 paginiInforme #1 de Control de Procesos (Terminado)Alex RuizÎncă nu există evaluări
- Trabajo Métodos de EntonaciónDocument22 paginiTrabajo Métodos de EntonaciónCarlos QuintanillaÎncă nu există evaluări
- Presentado ADocument17 paginiPresentado AjohnÎncă nu există evaluări
- Sintonizacion de ControladoresDocument21 paginiSintonizacion de ControladoresZ Erandi Cortes RodriguezÎncă nu există evaluări
- Pid Z-NDocument12 paginiPid Z-NEugenio Hermosilla CorderoÎncă nu există evaluări
- Unid4 Sem13Document40 paginiUnid4 Sem13Diego OmarÎncă nu există evaluări
- Control de Procesos 1Document9 paginiControl de Procesos 1Antonio Yañez RamirezÎncă nu există evaluări
- Control DigitalDocument23 paginiControl DigitalDeimy TorresÎncă nu există evaluări
- Lab01 - Sintonía Método de Curva de ReacciónDocument6 paginiLab01 - Sintonía Método de Curva de ReacciónLuis BarrientosÎncă nu există evaluări
- Control Intercambiador de CalorDocument17 paginiControl Intercambiador de Calorandresfel48100% (1)
- Variante en El Algoritmo PidDocument5 paginiVariante en El Algoritmo PidCarlos OliveiraÎncă nu există evaluări
- Sistema de Control Por ComputadorDocument6 paginiSistema de Control Por ComputadorClaudio Ayala BravoÎncă nu există evaluări
- Unidad 4 Ing. ControlDocument11 paginiUnidad 4 Ing. Controlhector quiroz garciaÎncă nu există evaluări
- Preinforme - Práctica de Control Grupo DDocument23 paginiPreinforme - Práctica de Control Grupo DDiego Fernando CuellarÎncă nu există evaluări
- Fase 2 - Identificar El Escenario y Analizar La EstabilidadDocument13 paginiFase 2 - Identificar El Escenario y Analizar La Estabilidadmarco riconÎncă nu există evaluări
- Lab11 Parte KevinalvarezDocument14 paginiLab11 Parte KevinalvarezElvis Quille ApazaÎncă nu există evaluări
- Método de Ganancia Última - Dinámica de Procesos e InstrumentaciónDocument30 paginiMétodo de Ganancia Última - Dinámica de Procesos e InstrumentaciónRichard UrbanoÎncă nu există evaluări
- Lab09 Sintonización PID Metodo de Oscilacion - PDF 1Document12 paginiLab09 Sintonización PID Metodo de Oscilacion - PDF 1Darlin AlfaroÎncă nu există evaluări
- Control - Automatico - de - Temperatura. 13-12-19Document62 paginiControl - Automatico - de - Temperatura. 13-12-19Are Keira Mejia OlivaresÎncă nu există evaluări
- Actividad en Clase ControlDocument13 paginiActividad en Clase ControlDiegoandres RestrepogalvanÎncă nu există evaluări
- CpidDocument12 paginiCpidjan gutiÎncă nu există evaluări
- Modos de Control Aplicados en InstrumentaciónDocument5 paginiModos de Control Aplicados en InstrumentaciónVictor Mares0% (1)
- Practica 08 - Exploracion de Algoritmos de Controles ( - 007Document4 paginiPractica 08 - Exploracion de Algoritmos de Controles ( - 007Roy Moya HÎncă nu există evaluări
- Practica 4Document6 paginiPractica 4paula rodriguez carreroÎncă nu există evaluări
- Prac - 3 Compensadores y ControladoresDocument23 paginiPrac - 3 Compensadores y ControladoresVOLTA PROÎncă nu există evaluări
- Práctica 4 - Laboratorio de Control de ProcesosDocument9 paginiPráctica 4 - Laboratorio de Control de ProcesosMARIA JOSE RUBIO GONZALEZÎncă nu există evaluări
- Fase 1 - DarioLopez - Version 2Document8 paginiFase 1 - DarioLopez - Version 2Dario Fernando LópezÎncă nu există evaluări
- UF0571 - Programas informáticos en eficiencia energética en edificiosDe la EverandUF0571 - Programas informáticos en eficiencia energética en edificiosÎncă nu există evaluări
- Solda Nelson1Document2 paginiSolda Nelson1Sergio GonzalesÎncă nu există evaluări
- 180 Koblecovsky PDFDocument56 pagini180 Koblecovsky PDFSergio GonzalesÎncă nu există evaluări
- Arena Verde PDFDocument4 paginiArena Verde PDFSergio GonzalesÎncă nu există evaluări
- Capitulo 4 ADocument41 paginiCapitulo 4 AChristopher DoyleÎncă nu există evaluări
- Bol69 Proceso Mig MagDocument4 paginiBol69 Proceso Mig MagSergio GonzalesÎncă nu există evaluări
- El LiberalismoDocument4 paginiEl LiberalismoSergio GonzalesÎncă nu există evaluări
- SAC34134224 4 Esp PDFDocument101 paginiSAC34134224 4 Esp PDFSergio GonzalesÎncă nu există evaluări
- LexicocultoliterarioDocument5 paginiLexicocultoliterarioSergio GonzalesÎncă nu există evaluări
- Almera PDFDocument8 paginiAlmera PDFSergio GonzalesÎncă nu există evaluări
- Diplomaturas de Gestion - Calidad PucpDocument5 paginiDiplomaturas de Gestion - Calidad PucpSergio GonzalesÎncă nu există evaluări
- BarcelonaDocument14 paginiBarcelonaSergio GonzalesÎncă nu există evaluări
- Practica 1Document6 paginiPractica 1blueangel2087Încă nu există evaluări
- Imo 2013Document2 paginiImo 2013Juan CarlosÎncă nu există evaluări
- DS 065-2011-PCMDocument6 paginiDS 065-2011-PCMSergio GonzalesÎncă nu există evaluări
- Guia Practica para La Implementacion Del Enfoque BPM y La Mejora Continua en El CITIDocument10 paginiGuia Practica para La Implementacion Del Enfoque BPM y La Mejora Continua en El CITISergio GonzalesÎncă nu există evaluări
- DS 065-2011-PCMDocument6 paginiDS 065-2011-PCMSergio GonzalesÎncă nu există evaluări
- Renta Anual 2013Document4 paginiRenta Anual 2013Sergio GonzalesÎncă nu există evaluări
- Aristoteles - MetafísicaDocument200 paginiAristoteles - MetafísicaeberalejandroÎncă nu există evaluări
- Aristoteles - MetafísicaDocument200 paginiAristoteles - MetafísicaeberalejandroÎncă nu există evaluări
- Calderas FWMDocument1 paginăCalderas FWMRamón Edwardo GarcíaÎncă nu există evaluări
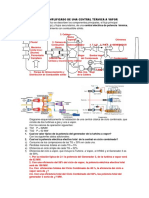
- Diagrama de Central Termica A Vapor + Problema Resuelto CC Clase 29 AbrilDocument2 paginiDiagrama de Central Termica A Vapor + Problema Resuelto CC Clase 29 AbrilJhonatanLidioMenachoAnguloÎncă nu există evaluări
- ResolucionPr02 2010Document9 paginiResolucionPr02 2010Carlos BarrazaÎncă nu există evaluări
- Elementos de La Construcción III - 12289 PDFDocument1 paginăElementos de La Construcción III - 12289 PDFHikari TakaesuÎncă nu există evaluări
- Así Funciona La Cadena de Combustibles Líquidos en El PaísDocument1 paginăAsí Funciona La Cadena de Combustibles Líquidos en El PaísAndrésFelipeQuirogaMirandaÎncă nu există evaluări
- El Petroleo en VenezuelaDocument18 paginiEl Petroleo en VenezuelajlgnÎncă nu există evaluări
- Daya 5Document4 paginiDaya 5Willy Arutaype SuniÎncă nu există evaluări
- Chile - Angel Carabias Jouniaux GLP ChileDocument29 paginiChile - Angel Carabias Jouniaux GLP ChileDiego GonzalezÎncă nu există evaluări
- Centrales Electricas IntroduccionDocument2 paginiCentrales Electricas IntroduccionPaolitoÎncă nu există evaluări
- Programa Analítico Instalaciones IndustrialesDocument3 paginiPrograma Analítico Instalaciones IndustrialesNico Falzone100% (1)
- FCK PresentaciónDocument8 paginiFCK PresentaciónjoseÎncă nu există evaluări
- SSE 1459 Archivo Ingeteam Solucion Diesel FV EspDocument8 paginiSSE 1459 Archivo Ingeteam Solucion Diesel FV EspGuajardo LizÎncă nu există evaluări
- Relación de Potencias Contratadas - 0921 R1Document352 paginiRelación de Potencias Contratadas - 0921 R1OMAR JESUS QUISPE AVILAÎncă nu există evaluări
- 01 Unidad SDM (Parte 2) Ejemplo 3Document3 pagini01 Unidad SDM (Parte 2) Ejemplo 3tapia manÎncă nu există evaluări
- Instructivo para El Instalador v2Document13 paginiInstructivo para El Instalador v2Ary KiehrÎncă nu există evaluări
- Reporte Visia A La Central Termoelectrica de Ciclo Combinado El SauzDocument10 paginiReporte Visia A La Central Termoelectrica de Ciclo Combinado El SauzCheckho Bg100% (1)
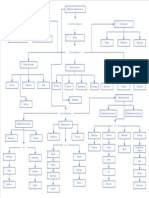
- Mapa Conceptual 1Document1 paginăMapa Conceptual 1William Steven Triana GarciaÎncă nu există evaluări
- Ciclo Potencia VaporDocument19 paginiCiclo Potencia VaporJesus CastilloÎncă nu există evaluări
- Examen Parcial Centrales Termoeléctricas 2019-1Document2 paginiExamen Parcial Centrales Termoeléctricas 2019-1ALEXANDER DONATO HUAMANI TUEROSÎncă nu există evaluări
- Material de Servicios FiltrosDocument11 paginiMaterial de Servicios FiltrosAlex reyesÎncă nu există evaluări
- Proyecto Comunidad Pedro Calfuqueo - IcalmaDocument24 paginiProyecto Comunidad Pedro Calfuqueo - IcalmaWaldo Antonio Quijada VicencioÎncă nu există evaluări
- Formulario Solicitud RHO PDFDocument2 paginiFormulario Solicitud RHO PDFMartin Armestar LopezÎncă nu există evaluări
- Anteproyecto de Trabajo Especial de Grado - MancillaDocument20 paginiAnteproyecto de Trabajo Especial de Grado - MancillaLuis Miguel Labarca RodriguezÎncă nu există evaluări
- Capítulo 01 - Principales Indicadores de Operación Del SeinDocument3.345 paginiCapítulo 01 - Principales Indicadores de Operación Del SeinRubett ArizaÎncă nu există evaluări
- Prototipo Híbrido de Generación EléctricaDocument40 paginiPrototipo Híbrido de Generación Eléctricaluis adolfo martinez salasÎncă nu există evaluări
- Trabajo Práctico 1Document3 paginiTrabajo Práctico 1Yilson Abner100% (1)
- Sistemas Eléctricos de PotenciaDocument2 paginiSistemas Eléctricos de PotenciaCesar BeloquiÎncă nu există evaluări