Documente Academic
Documente Profesional
Documente Cultură
02 FFT Tema 02 - Vectores en Espacios Vectoriales Euclideos
Încărcat de
Matías MartínezTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
02 FFT Tema 02 - Vectores en Espacios Vectoriales Euclideos
Încărcat de
Matías MartínezDrepturi de autor:
Formate disponibile
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
TEMA 2. VECTORES EN ESPACI OS VECTORI ALES EUCL DEOS.
1. Conceptos bsicos.
2. Expresin del producto escalar. Matriz de Gram.
3. Cambios de base.
4. Componentes covariantes de un vector.
5. Componentes covariantes frente a cambios de base.
6. Base recproca de una base dada.
7. Interpretacin geomtrica de las componentes covariantes y contravariantes.
8. Forma bilineal fundamental en la base recproca.
9. Relacin entre bases recprocas frente a cambios de base.
10. Bases ortonormales.
11. Cuestiones tericas y prcticas.
12. Ejemplos prcticos.
1
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
1. CONCEPTOS BSICOS.
Siguiendo con los recuerdos sobre espacios vectoriales, se llama espacio vectorial
eucldeo a todo espacio vectorial sobre el cuerpo de los nmeros reales (R) en el que,
adems, se define una conexin interna entre vectores (producto escalar de dos vectores
cuyo resultado es un nmero real) que ha de satisfacer determinadas propiedades
axiomticas que ya son sabidas, y conviene tener presentes: simetra, bilinealidad y carcter
de definida positiva.
La notacin usualmente empleada es:
Espacio vectorial eucldeo o, abreviadamente, espacio eucldeo: E
n
(el subndice n hace
referencia a la dimensin del espacio).
Producto escalar de dos vectores u y v: uv.
Sobre la base de la existencia del producto escalar se definen unos conceptos exclusivos de
los espacios eucldeos tales como:
Norma de un vector v: N(v) = vv (Hay que recordar aqu que una de las propiedades
que se le exigen a la conexin interna es que el producto escalar de cualquier vector por
s mismo es mayor que cero, s el vector es distinto del nulo, y cero s se trata del vector
nulo, esto es: N(v) > 0 v 0 y N(v) = 0 v = 0 ).
Mdulo de un vector v: v que es la determinacin positiva de la raz cuadrada de la
norma, esto es: v = + ) ( N v = v v . Se llama vector unitario a aquel vector cuyo
mdulo es la unidad. v = 1.
ngulo entre dos vectores u y v :
uv
que es el ngulo cuyo coseno es el cociente entre
el producto escalar de los vectores y el producto de sus mdulos,
cos
uv
=
v u
v u
supuestos u y v no nulos.
Ortogonalidad de vectores; u y v son vectores ortogonales entre s, siempre que:
uv = 0, siendo u 0 y v 0. En el espacio de los vectores geomtricos si dos vectores
son ortogonales, el ngulo entre ellos es de 90.
Todo lo anterior permite definir dos tipos de bases especiales en los espacios eucldeos
que son:
Base ortogonal: Es toda base del espacio cuyos vectores son ortogonales entre s,
luego todos los productos escalares entre vectores de bases ortogonales son siempre
nulos. Por ejemplo:
Sean a, b y c los vectores de una base ortogonal del espacio eucldeo E
3
, deber de
cumplirse que:
ab = bc = ca = 0
2
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
Base ortonormal: Es toda base ortogonal cuyos vectores, adems, son unitarios, luego
el mdulo de cualquier vector de una base ortonormal ser siempre la unidad.
Volviendo a la base a, b, c, anterior, si dicha base es ortonormal se cumplir:
ab = bc = ca = 0
y adems:
a = b = c = 1
2. EXPRESIN DEL PRODUCTO ESCALAR. MATRIZ DE GRAM.
Sea e
i
una base del espacio, y sean u y v dos vectores del mismo. Dichos vectores se
pueden expresar como:
u = u
i
e
i
(1)
v = v
i
e
i
(2)
El producto escalar de estos vectores es, por tanto:
uv = (u
i
e
i
)(v
j
e
j
) (3)
Aplicando ahora la propiedad axiomtica de bilinealidad, que se le exige al producto escalar,
al producto de las dos combinaciones lineales que aparecen a la derecha de la igualdad (3),
resulta:
uv = (u
i
v
j
) ( e
i
e
j
) (4)
De esta forma se concluye que la determinacin del producto escalar de dos vectores
requiere el conocimiento de los n
2
productos escalares e
i
e
j
de los vectores de la base entre
s.
De acuerdo con la notacin usual designaremos por g
i j
el conjunto de dichos productos
escalares:
g
i j
= e
i
e
j
(5)
Hay que hacer notar en este punto que el sistema de n
2
nmeros reales configurado por g
i j
es simtrico por ser conmutativo el producto escalar. Es decir:
g
i j
= e
i
e
j
= e
j
e
i
= g
j i
Teniendo en cuenta, ahora, la expresin (5) el producto de dos vectores expresado en (4)
puede escribirse:
uv = u
i
v
j
g
i j
(6)
De esta forma el producto escalar de dos vectores queda expresado como una forma lineal
de las componentes de ambos. Por ello, a la expresin (6) se la llama forma bilineal
fundamental en la base e
i
, y a los nmeros g
i j
coeficientes de la forma bilineal
fundamental en la base dada.
3
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
Para un espacio vectorial de dimensin 3 (n=3), la expresin (1) u = u
i
e
i
y (2) v = v
i
e
i
quedarn como:
u = u
i
e
i
= u
1
e
1
+ u
2
e
2
+ u
3
e
3
v = v
i
e
i
= v
1
e
1
+ v
2
e
2
+ v
3
e
3
Resultando que el producto escalar (3):
uv = (u
i
e
i
)(v
j
e
j
) =
= (u
1
e
1
)(v
1
e
1
) + (u
1
e
1
)(v
2
e
2
) + (u
1
e
1
)(v
3
e
3
) +
+ (u
2
e
2
)(v
1
e
1
) + (u
2
e
2
)(v
2
e
2
) + (u
2
e
2
)(v
3
e
3
) +
+ (u
3
e
3
)(v
1
e
1
) + (u
3
e
3
)(v
2
e
2
) + (u
3
e
3
)(v
3
e
3
) +
De donde aplicando la propiedad de bilinealidad del producto escalar obtenemos (4):
uv = (u
i
v
j
) (e
i
e
j
) =
= (u
1
v
1
) (e
1
e
1
) + (u
1
v
2
) (e
1
e
2
) + (u
1
v
3
) (e
1
e
3
) +
+ (u
2
v
1
) (e
2
e
1
) + (u
2
v
2
) (e
2
e
2
) + (u
2
v
3
) (e
2
e
3
) +
+ (u
3
v
1
) (e
3
e
1
) + (u
3
v
2
) (e
3
e
2
) + (u
3
v
3
) (e
3
e
3
) +
Sustituyendo los productos escalares entre los vectores de la base de referencia, segn la
notacin (5), obtendremos:
uv = (u
i
v
j
) g
i j
=
= (u
1
v
1
) g
1 1
+ (u
1
v
2
) g
1 2
+ (u
1
v
3
) g
1 3
+
+ (u
2
v
1
) g
2 1
+ (u
2
v
2
) g
2 2
+ (u
2
v
3
) g
2 3
+
+ (u
3
v
1
) g
3 1
+ (u
3
v
2
) g
3 2
+ (u
3
v
3
) g
3 3
+
y teniendo en cuenta la simetra de los n
2
nmeros reales g
i j
, la expresin (6) en este caso,
quedar:
uv = (u
i
v
j
) g
i j
=
= (u
1
v
1
) g
1 1
+ (u
1
v
2
) g
1 2
+ (u
1
v
3
) g
1 3
+
+ (u
2
v
1
) g
1 2
+ (u
2
v
2
) g
2 2
+ (u
2
v
3
) g
2 3
+
+ (u
3
v
1
) g
1 3
+ (u
3
v
2
) g
2 3
+ (u
3
v
3
) g
3 3
+
Obsrvese que cuando se define la forma bilineal fundamental y sus coeficientes, se hace
referencia a la base del espacio en la que se trabaja, pues naturalmente, estos coeficientes
sern distintos en cada base del mismo. Quiere esto decir que si se trabaja en otra base e
i
en la que los anteriores vectores u y v tengan por componentes u
i
y v
j
, respectivamente,
ser:
g
i j
= e
i
e
j
(5)
y el producto escalar de dos vectores en esta base e
i
:
uv = u
i
v
j
g
i j
(6)
Quiz conviene recordar en este punto que, aunque los coeficientes de la forma bilineal
fundamental en cada base son distintos as como las componentes de los vectores, el
resultado de su aplicacin a dos vectores concretos, para calcular su producto escalar, ser
el mismo. Dicho de otra manera, el producto escalar de dos vectores es intrnseco o sea
que su valor no depende de la base de trabajo elegida. Luego, se cumplir siempre que:
uv = u
i
v
j
g
i j
= u
i
v
j
g
i j
4
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
Finalmente, la expresin (6) puede traducirse al lenguaje matricial de la siguiente forma:
uv = u
i
v
j
g
i j
= (u
i
) G {v
j
} (7)
donde G = [g
i j
], es decir que se trata de la matriz cuadrada cuyos elementos son los n
2
coeficientes de la forma bilineal fundamental y que, entre otras cosas, es una matriz
simtrica. Esta matriz G es la que se conoce como matriz de Gram del espacio eucldeo en
la base dada.
Expresando matricialmente el ltimo desarrollo en un espacio de dimensin 3:
uv = (u
1
u
2
u
3
) = (u
3 3 2 3 1 3
3 2 2 2 1 2
3 1 2 1 1 1
e e e e e e
e e e e e e
e e e e e e
3
2
1
v
v
v
1
u
2
u
3
)
33 32 31
23 22 21
13 12 11
g g g
g g g
g g g
3
2
1
v
v
v
Obviamente, en el caso de que la base de trabajo elegida fuese ortogonal, la matriz de
Gram sera una matriz diagonal y si, adems, la base fuese ortonormal la matriz de Gram
sera la matriz identidad G = I o, en trminos indiciales:
g
i j
=
i j
(8) (slo para bases ortonormales)
3. CAMBIOS DE BASE.
Sean dos bases e
i
(antigua) y e
i
(nueva) relacionadas por:
e
i
= e
i
i
A
i
(9)
e
i
= e
i
i
A
i
(10)
Tal como se ha visto, las expresiones de la forma bilineal fundamental en dichas bases
sern:
uv = g
i j
u
i
v
j
(11) (Es la misma que 6)
uv = g
i j
u
i
v
j
(12) (Es la misma que 6)
Interesa ahora encontrar las relaciones entre los n
2
coeficientes de la forma bilineal
fundamental en ambas bases, esto es, las relaciones entre g
i j
y g
i j
. Partiendo de la
expresin (5) y sustituyendo (9) y (10) resulta:
g
i j
= e
i
e
j
= ( e
i
i
A
i
)( e
j
j
A
j
) = e
i
i
A
j
j
A
i
e
j
con lo que, teniendo en cuenta (5), es:
g
i j
= g
i
i
A
j
j
A
i j
(13)
Para un espacio vectorial de dimensin 3 (n=3), la expresin (13) se desarrolla como:
g
1 1
= e
1
e
1
=
( e
i
1
A
i
)( e
j
1
A
j
) = e
i
1
A
j
1
A
i
e
j
=
i
1
A
j
1
A g
i j
g
1 2
= e
1
e
2
= ( e
i
1
A
i
)( e
j
2
A
j
) = e
i
1
A
j
2
A
i
e
j
= g
i
1
A
j
2
A
i j
5
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
g
1 3
= e
1
e
3
= ( e
i
1
A
i
)( e
j
3
A
j
) = e
i
1
A
j
3
A
i
e
j
= g
i
1
A
j
3
A
i j
g
2 2
= e
2
e
2
= ( e
i
2
A
i
)( e
j
2
A
j
) = e
i
2
A
j
2
A
i
e
j
= g
i
2
A
j
2
A
i j
g
2 3
= e
2
e
3
= ( e
i
2
A
i
)( e
j
3
A
j
) = e
i
2
A
j
3
A
i
e
j
= g
i
2
A
j
3
A
i j
g
3 3
= e
3
e
3
= ( e
i
3
A
i
)( e
j
3
A
j
) = e
i
3
A
j
3
A
i
e
j
= g
i
3
A
j
3
A
i j
Cumplindose por la simetra de las componentes de la forma bilineal fundamental que:
g
2 1
= g
1 2
; g
3 2
= g
2 3
; g
3 1
= g
1 3
Desarrollando ahora las anteriores expresiones:
g
1 1
= e
1
e
1
= ( e
1
1
A
1
+ e
2
1
A
2
+ e
3
1
A
3
)( e
1
1
A
1
+ e
2
1
A
2
+ e
3
1
A
3
) =
= e
1
1
A
1
1
A
1
e
1
+ e
1
1
A
2
1
A
1
e
2
+ e
1
1
A
3
1
A
1
e
3
+
+ e
2
1
A
1
1
A
2
e
1
+ e
2
1
A
2
1
A
2
e
2
+ e
2
1
A
3
1
A
2
e
3
+
+ e
3
1
A
1
1
A
3
e
1
+ e
3
1
A
2
1
A
3
e
2
+ e
3
1
A
3
1
A
3
e
3
=
= g
1
1
A
1
1
A
1 1
+ g
1
1
A
2
1
A
1 2
+ g
1
1
A
3
1
A
1 3
+
+ g
2
1
A
1
1
A
2 1
+ g
2
1
A
2
1
A
2 2
+ g
2
1
A
3
1
A
2 3
+
+ g
3
1
A
1
1
A
3 1
+ g
3
1
A
2
1
A
3 2
+ g
3
1
A
3
1
A
3 3
+
g
1 2
= e
1
e
2
= ( e
1
1
A
1
+ e
2
1
A
2
+ e
3
1
A
3
)( e
1
2
A
1
+ e
2
2
A
2
+ e
3
2
A
3
) =
= e
1
1
A
1
2
A
1
e
1
+ e
1
1
A
2
2
A
1
e
2
+ e
1
1
A
3
2
A
1
e
3
+
+ e
2
1
A
1
2
A
2
e
1
+ e
2
1
A
2
2
A
2
e
2
+ e
2
1
A
3
2
A
2
e
3
+
+ e
3
1
A
1
2
A
3
e
1
+ e
3
1
A
2
2
A
3
e
2
+ e
3
1
A
3
2
A
3
e
3
=
= g
1
1
A
1
2
A
1 1
+ g
1
1
A
2
2
A
1 2
+ g
1
1
A
3
2
A
1 3
+
+ g
2
1
A
1
2
A
2 1
+ g
2
1
A
2
2
A
2 2
+ g
2
1
A
3
2
A
2 3
+
+ g
3
1
A
1
2
A
3 1
+ g
3
1
A
2
2
A
3 2
+ g
3
1
A
3
2
A
3 3
+
g
1 3
= e
1
e
3
= ( e
1
1
A
1
+ e
2
1
A
2
+ e
3
1
A
3
)( e
1
3
A
1
+ e
2
3
A
2
+ e
3
3
A
3
) =
= e
1
1
A
1
3
A
1
e
1
+ e
1
1
A
2
3
A
1
e
2
+ e
1
1
A
3
3
A
1
e
3
+
+ e
2
1
A
1
3
A
2
e
1
+ e
2
1
A
2
3
A
2
e
2
+ e
2
1
A
3
3
A
2
e
3
+
+ e
3
1
A
1
3
A
3
e
1
+ e
3
1
A
2
3
A
3
e
2
+ e
3
1
A
3
3
A
3
e
3
=
= g
1
1
A
1
3
A
1 1
+ g
1
1
A
2
3
A
1 2
+ g
1
1
A
3
3
A
1 3
+
+ g
2
1
A
1
3
A
2 1
+ g
2
1
A
2
3
A
2 2
+ g
2
1
A
3
3
A
2 3
+
+ g
3
1
A
1
3
A
3 1
+ g
3
1
A
2
3
A
3 2
+ g
3
1
A
3
3
A
3 3
+
y de igual forma las restantes componentes...
Si se observa la estructura de operaciones simbolizadas en esta ltima expresin, puede
hacerse su traduccin al lenguaje matricial quedando de la siguiente forma:
G = A G A
T
(14)
En la que G y G son, respectivamente, las matrices de Gram en las bases antigua y
nueva; A es la matriz del cambio de base y A
T
su traspuesta.
6
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
La expresin inversa de la (14) puede obtenerse premultiplicando, en ambos miembros, por
A
-1
y postmultiplicando por A
-1 T
resultando:
G = A
-1
G A
-1 T
(15)
Partiendo, ahora, de (7) y teniendo en cuenta (15), as como las expresiones del tema
anterior (15) ((v
i
) = (v
i
) A) y (17) ({v
j
} = A
T
{v
j
}), resulta:
uv = (u
i
) G {v
j
} = (u
i
) A A
-1
G A
-1 T
A
T
{v
j
} = (u
i
) I G I {v
j
} = (u
i
) G {v
j
}
quedando comprobada, as, la coherencia de (14) y (15) con el carcter intrnseco del
producto escalar de dos vectores.
4. COMPONENTES COVARIANTES DE UN VECTOR.
La existencia de la conexin interior en los espacios eucldeos permite la introduccin de un
nuevo tipo de componentes asociadas a cada vector en una base dada e
i
. En efecto, dado
un vector v se definen como componentes covariantes del mismo en e
i
los n nmeros
reales obtenidos como:
v
i
= ve
i
(16)
Luego en un espacio de dimensin 3:
v
1
= ve
1
, v
2
= ve
2
y v
3
= ve
3
Obsrvese la diferente posicin del ndice (subndice) utilizada para este nuevo tipo de
componentes respecto de las que, hasta ahora, habamos llamado componentes de un
vector (v
i
) en las que la posicin es de superndice y que, para diferenciarlas de las que se
acaban de definir, llamaremos componentes contravariantes a partir de ahora.
Para encontrar la relacin entre ambos tipos de componentes de un vector en una cierta
base, basta partir de la expresin (16) y sustituir en ella la expresin (3) (v = v
j
e
j
) del tema
anterior. En efecto:
v
i
= ve
i
= v
j
e
j
e
i
= v
j
g
j i
Aprovechando la simetra de los coeficientes de la forma bilineal fundamental, la expresin
anterior puede escribirse tambin como:
v
i
= v
j
g
i j
(17)
Para un espacio de dimensin 3, la anterior expresin se traduce en:
v
1
= v
j
g
1 j
= v
1
g
1 1
+ v
2
g
1 2
+ v
3
g
1 3
v
2
= v
j
g
2 j
= v
1
g
2 1
+ v
2
g
2 2
+ v
3
g
2 3
v
3
= v
j
g
3 j
= v
1
g
3 1
+ v
2
g
3 2
+ v
3
g
3 3
En lenguaje matricial la traduccin de (17) da lugar a:
(v
i
) = (v
j
) G (18)
o bien, trasponiendo y teniendo en cuenta que G
T
= G
7
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
{v
i
} = G {v
j
} (19)
Siguiendo con el lenguaje matricial, las expresiones inversas de (18) y (19) son:
(v
j
) = (v
i
) G
-1
(20)
{v
j
} = G
-1
{v
i
} (21)
Si se conviene en llamar ahora g
i j
a los elementos de la matriz inversa de G, las
expresiones anteriores pueden escribirse en lenguaje indicial como:
v
i
= v
j
g
i j
(22)
que es la expresin inversa de (17).
Para un espacio de dimensin 3, las anteriores expresiones se traducen en:
(v
1
v
2
v
3
) = (v
1
v
2
v
3
) = (v
33 32 31
23 22 21
13 12 11
g g g
g g g
g g g
1
v
2
v
3
)
33 23 13
23 22 12
13 12 11
g g g
g g g
g g g
trasponiendo, y teniendo en cuenta la simetra de la matriz G:
3
2
1
v
v
v
=
33 23 13
23 22 12
13 12 11
g g g
g g g
g g g
3
2
1
v
v
v
siendo las expresiones inversas de estas dos ltimas:
(v
1
v
2
v
3
) = (v
1
v
2
v
3
)
33 32 31
23 22 21
13 12 11
g g g
g g g
g g g
3
2
1
v
v
v
=
33 32 31
23 22 21
13 12 11
g g g
g g g
g g g
3
2
1
v
v
v
donde g
i j
son los elementos de la matriz inversa de G, que tambin es simtrica.
Se observa pues, como las operaciones de cambio de contravariantes a covariantes, bajada
de ndice, y las de componentes covariantes a contravariantes, subida de ndice, se realizan
con la matriz de Gram y su inversa respectivamente.
Como anotacin adicional a todo lo dicho, y por un procedimiento semejante al utilizado en
el apartado 5 del tema anterior, puede verse que:
g
i j
g
j k
=
k
i
que corresponde en lenguaje matricial a:
8
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
G G
-1
= I
Para un espacio de dimensin 3 lo expresaremos:
33 32 31
23 22 21
13 12 11
g g g
g g g
g g g
=
33 32 31
23 22 21
13 12 11
g g g
g g g
g g g
( ) ( ) ( )
( ) ( ) (
( ) ( ) (
+ + + + + +
+ + + + + +
+ + + + + +
33
33
23
32
13
31
32
33
22
32
12
31
31
33
21
32
11
31
33
23
23
22
13
21
32
23
22
22
12
21
31
23
21
22
11
21
33
13
23
12
13
11
32
13
22
12
12
11
31
13
21
12
11
11
g g g g g g g g g g g g g g g g g g
g g g g g g g g g g g g g g g g g g
g g g g g g g g g g g g g g g g g g
)
)
=
=
1 0 0
0 1 0
0 0 1
5. COMPONENTES COVARIANTES FRENTE A CAMBIOS DE BASE.
Dado un vector v de componentes covariantes v
i
y v
i
en dos bases e
i
y e
i
relacionadas
entre s por las expresiones tales como las (9) y (10), se trata de encontrar las relaciones
entre ellas.
Para ello puede partirse de (16), y sustituyendo (10), resulta:
v
i
= ve
i
= v( e
i
i
A
i
) = ve
i
i
A
i
de manera que teniendo en cuenta que, por definicin, es:
v
i
= ve
i
resulta:
v
i
= v
i
i
A
i
(23)
Para un espacio de dimensin 3 se escribir:
v
1
= v
i
1
A
i
= v
1
1
A
1
+ v
2
1
A
2
+ v
3
1
A
3
v
2
= v
i
2
A
i
= v
1
2
A
1
+ v
2
2
A
2
+ v
3
2
A
3
v
3
= v
i
3
A
i
= v
1
3
A
1
+ v
2
3
A
2
+ v
3
3
A
3
Si en lugar de partir de (16) se hubiera partido de su equivalente en la base nueva, es decir
v
i
= ve
i
, sustituyendo (9) se llega a:
v
i
= ve
i
= v( e
i
i
A
i
) = ve
i
i
A
i
con lo cual, finalmente, resulta:
9
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
v
i
= v
i
i
A
i
(24)
que es la inversa de (23).
En un espacio de dimensin 3 se escribir:
v
1
=
i
1
A
v
i
=
1
1
A
v
1
+ v
2
1
A
2
+
3
1
A
v
3
v
2
= v
i
2
A
i
= v
1
2
A
1
+ v
2
2
A
2
+
3
2
A v
3
v
3
= v
i
3
A
i
= v
1
3
A
1
+ v
2
3
A
2
+
3
3
A v
3
Matricialmente, (23) y (24) pueden escribirse de la siguiente forma:
(v
i
) = (v
i
) A
T
o bien {v
i
} = A {v
i
} (25) (proceden de 24)
(v
i
) = (v
i
) A
-1 T
o bien {v
i
} = A
-1
{v
i
} (26) (proceden de 23)
A modo de resumen, y a los efectos comparativos que despus se vern, puede
establecerse el siguiente cuadro de expresiones en el que se apuntan, en primer lugar, las
relaciones entre dos bases, a continuacin las relaciones entre las componentes covariantes
de un vector en ambas bases y, finalmente, las correspondientes a las componentes
contravariantes vistas en el tema anterior:
Bases c. covariantes c. contravariantes
e
i
= e
i
i
A
i
v
i
=
i
i
A v
i
v
i
=
i
i
A v
i
e
i
= e
i
i
A
i
v
i
= v
i
i
A
i
v
i
= v
i
i
A
i
De la observacin del cuadro se ve como, formalmente, las expresiones relativas a las
componentes covariantes frente a cambios de base son las mismas que las del propio
cambio de base, mientras que las relativas a las contravariantes son las contrarias de las
del cambio de base (la que da las componentes contravariantes nuevas en funcin de las
antiguas es como la que expresa la base antigua en funcin de la nueva). Esta es la
justificacin del adjetivo contravariante que se da a este tipo de componentes.
6. BASE RECPROCA DE UNA BASE DADA.
Dada una base e
i
en un espacio eucldeo es posible, utilizando la conexin interior, definir
un nuevo concepto, el de base recproca e
i
de la base dada e
i
, que es el conjunto de n
vectores e
i
que satisfacen las siguientes expresiones:
e
i
e
j
= (27)
j
i
Obviamente, por la propiedad conmutativa del producto escalar, es igual que:
e
i
e
j
= =
i
j
j
i
En otros trminos, y a modo de ejemplo, en un espacio eucldeo de dimensin 3 las
condiciones anteriores significan que el primer vector de la base recproca e
1
es ortogonal a
10
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
los vectores segundo e
2
y tercero e
3
de la base dada, el segundo de la recproca e
2
lo es al
primero e
1
y tercero e
3
de la base dada y, finalmente, el tercero de la recproca e
3
es
ortogonal al primero e
1
y segundo e
2
de la base dada.
Para caracterizar los vectores de la base recproca e
i
en la base dada e
i
, se puede partir
de:
e
i
=
i j
e
j
(28)
donde simplemente se hace uso de que todo vector puede expresarse de manera nica
como combinacin lineal de los vectores de una base.
Estamos pues designando por
i j
a las componentes contravariantes de los vectores de la
base e
i
(recproca de e
i
) en la propia base e
i
y se trata, por tanto, de identificar dichas
componentes.
Para un espacio de dimensin 3, la expresin (28) se escribir:
e
1
=
1 j
e
j
=
1 1
e
1
+
1 2
e
2
+
1 3
e
3
e
2
=
2 j
e
j
=
2 1
e
1
+
2 2
e
2
+
2 3
e
3
e
3
=
3 j
e
j
=
3 1
e
1
+
3 2
e
2
+
3 3
e
3
Para ello, partiendo de (28) y efectuando el producto escalar por un vector e
k
de la base
dada en ambos miembros, resulta:
e
i
e
k
= (
i j
e
j
)e
k
=
i j
e
j
e
k
=
i j
g
j k
Por otra parte, y de acuerdo con (27) es e
i
e
k
= con lo que:
i
k
i j
g
j k
=
i
k
y por tanto, de acuerdo con lo visto al final del apartado 4: (g
i j
g
j k
= ), debe ser:
i
k
i j
= g
i j
(29)
Es decir que las componentes contravariantes
i j
de los vectores de la base recproca e
i
de
una base dada e
i
, en dicha base e
i
, son los elementos de la matriz inversa de la matriz de
Gram g
i j
= G
-1
en la base dada e
i
. As, a partir de ahora puede escribirse:
e
i
= g
i j
e
j
(30)
En forma matricial la expresin anterior puede escribirse:
{e
i
} = G
-1
{e
j
} o bien (e
i
) = (e
j
) G
1 T
(31)
y por ser simtrica la matriz de Gram:
(e
i
) = (e
j
) G
1
expresin a la que se puede dar la siguiente interpretacin: En el cambio de base de una
base dada e
i
a su recproca e
i
la matriz inversa de la matriz de Gram [g
i j
] desempea el
papel de matriz de cambio de base.
11
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
Para un espacio de dimensin 3, la expresin (30) se escribir:
e
1
= g
1 j
e
j
= g
1 1
e
1
+ g
1 2
e
2
+ g
1 3
e
3
e
2
= g
2 j
e
j
= g
2 1
e
1
+ g
2 2
e
2
+ g
2 3
e
3
e
3
= g
3 j
e
j
= g
3 1
e
1
+ g
3 2
e
2
+ g
3 3
e
3
Mientras que en forma matricial resultar:
3
2
1
e
e
e
= o bien (e
33 23 13
23 22 12
13 12 11
g g g
g g g
g g g
3
2
1
e
e
e
1
e
2
e
3
) = (e
1
e
2
e
3
)
33 23 13
23 22 12
13 12 11
g g g
g g g
g g g
Por otra parte, dado el carcter no singular (det lGl 0) de la matriz G, la expresin (31)
confirma la independencia lineal de los n vectores e
i
y, por tanto, el carcter de base que,
desde el principio, hemos supuesto para ellos.
La expresin inversa de (31) es:
{e
i
} = G {e
j
} (32)
cuya traduccin al lenguaje indicial es:
e
i
= g
i j
e
j
(33)
que es la inversa de (30).
En un espacio vectorial n=3, la expresin (32) se escribir:
3
2
1
e
e
e
= o bien (e
33 23 13
23 22 12
13 12 11
g g g
g g g
g g g
3
2
1
e
e
e
1
e
2
e
3
) = (e
1
e
2
e
3
)
33 23 13
23 22 12
13 12 11
g g g
g g g
g g g
y la (33) como:
e
1
= g
1 j
e
j
= g
1 1
e
1
+ g
1 2
e
2
+ g
1 3
e
3
e
2
= g
2 j
e
j
= g
2 1
e
1
+ g
2 2
e
2
+ g
2 3
e
3
e
3
= g
3 j
e
j
= g
3 1
e
1
+ g
3 2
e
2
+ g
3 3
e
3
Comprobado el carcter de base de lo que hemos definido como base recproca de una
base dada procede ahora hacer el siguiente anlisis:
Sea un vector v cuyas componentes contravariantes v
i
, y covariantes v
i
, en una base e
i
son
conocidas. Se trata de determinar las componentes contravariantes y covariantes de dicho
vector v en la base e
i
recproca de la base dada e
i
.
Las componentes contravariantes en e
i
sern n nmeros reales, a los que denotaremos de
momento por v
i
(diferencindolas as de las v
i
que son las contravariantes en e
i
) tales que:
v = v
i
e
i
(34)
Efectuando el producto escalar de ambos miembros de (34) por un vector cualquiera de la
base e
i
, y teniendo en cuenta (27) (e
i
e
j
= ), resulta:
j
i
12
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
ve
j
= ( v
i
e
i
)e
j
= v
i
e
i
e
j
= v
i
i
j
La ltima expresin obtenida es un sumatorio en i para un cierto valor de j dado. As,
dado el valor de las deltas de Kronecker, en el desarrollo de dicho sumatorio solo ser
distinto de cero el sumando correspondiente a i=j y, por tanto, el resultado de las
operaciones anteriores es:
ve
j
= v
j
de manera que teniendo en cuenta ahora (16) (v
i
= ve
i
) resulta que para todo valor de j
es:
v
j
= v
j
(35)
Es decir que las componentes contravariantes de un vector en la base recproca de
una base dada coinciden con sus covariantes en la base dada. Por ello, a partir de
ahora la expresin (34) se escribir de la siguiente forma:
v = v
i
e
i
(36)
Anlogamente, si llamamos v
i
a las componentes covariantes del vector v en la base e
i
,
recproca de la e
i
, por definicin ser:
v
i
= ve
i
Sustituyendo ahora v por su expresin como combinacin lineal de los vectores de la base
e
i
, y volviendo a tener en cuenta (27) (e
i
e
j
= ), es:
j
i
v
i
= (v
j
e
j
)e
i
= v
j
e
j
e
i
= v
j
= v
i
j
i
Es decir que las componentes covariantes de un vector en la base recproca de una
base dada coinciden con las contravariantes de dicho vector en la base dada.
En un espacio vectorial n=3, la anterior deduccin se obtiene:
v
1
= (v
j
e
j
)e
1
= (v
1
e
1
+ v
2
e
2
+ v
3
e
3
)e
1
= v
1
e
1
e
1
+ v
2
e
2
e
1
+ v
3
e
3
e
1
= v
1
+ v
1
1
2
+ v
1
2
3
= v
1
3
1
v
2
= (v
j
e
j
)e
2
= (v
1
e
1
+ v
2
e
2
+ v
3
e
3
)e
2
= v
1
e
1
e
2
+ v
2
e
2
e
2
+ v
3
e
3
e
2
= v
1
+ v
2
1
2
+ v
2
2
3
= v
2
3
2
v
3
= (v
j
e
j
)e
3
= (v
1
e
1
+ v
2
e
2
+ v
3
e
3
)e
3
= v
1
e
1
e
3
+ v
2
e
2
e
3
+ v
3
e
3
e
3
= v
1
+ v
3
1
2
+ v
3
2
3
= v
3
3
3
En resumen, las componentes contravariantes (covariantes) de un vector en una base
son covariantes (contravariantes) en la recproca.
Este es un resultado importante, que nos permite, a partir de ahora, expresar todo vector v
indistintamente como:
v = v
i
e
i
(37)
v = v
i
e
i
(38)
siendo v
i
y v
i
las componentes contravariantes y covariantes de v, respectivamente, en la
base e
i
(o covariantes y contravariantes, respectivamente, en la base e
i
recproca de la
13
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
base dada e
i
) relacionadas entre s, segn lo visto en el apartado 4, segn las expresiones
(17) y (22) vistas antes:
v
i
= g
i j
v
j
(17)
v
i
= g
i j
v
j
(22)
siendo g
i j
los coeficientes de la forma bilineal fundamental en e
i
.
En un espacio vectorial n=3,la expresin (37) se escribir:
v = v
i
e
i
= v
1
e
1
+ v
2
e
2
+ v
3
e
3
mientras que la (38) resultar:
v = v
i
e
i
= v
1
e
1
+ v
2
e
2
+ v
3
e
3
la expresin (17) y (22) se escribirn:
v
1
= g
1 j
v
j
= g
1 1
v
1
+ g
1 2
v
2
+ g
1 3
v
3
v
2
= g
2 j
v
j
= g
2 1
v
1
+ g
2 2
v
2
+ g
2 3
v
3
v
3
= g
3 j
v
j
= g
3 1
v
1
+ g
3 2
v
2
+ g
3 3
v
3
v
1
= g
1 j
v
j
= g
1 1
v
1
+ g
1 2
v
2
+ g
1 3
v
3
v
2
= g
2 j
v
j
= g
2 1
v
1
+ g
2 2
v
2
+ g
2 3
v
3
v
3
= g
3 j
v
j
= g
3 1
v
1
+ g
3 2
v
2
+ g
3 3
v
3
7. INTERPRETACIN GEOMTRICA DE LAS COMPONENTES COVARIANTES Y
CONTRAVARIANTES.
Para realizar una interpretacin geomtrica de las componentes covariantes y
contravariantes de un cierto vector u en una base dada e
i
, vamos a estudiar el caso
concreto de que el espacio eucldeo considerado es E
2
y en l se tiene una base cualquiera
formada por los vectores unitarios e
1
y e
2
, es decir |e
1
|=1 y |e
2
|=1; los hemos supuesto
unitarios para facilitar la comprensin de la figura siguiente.
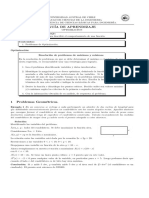
e1
e2
u
l
1
l
2
luI
donde se observa que:
14
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
u = l
1
e
1
+ l
2
e
2
por lo que podemos identificar las longitudes acotadas l
1
y l
2
con las componentes
contravariantes del vector u en la base dada e
i
del espacio vectorial eucldeo E
2
, es decir:
u = l
1
e
1
+l
2
e
2
= u
1
e
1
+ u
2
e
2
Seguidamente observando esta nueva representacin del mismo vector u, y en la misma
base:
e1
e2
u
l1
l 2
90
90
Analizando esta ltima construccin geomtrica, aplicando las propiedades del producto
escalar de dos vectores, podemos decir:
l
1
= |u| cos = ue
1
= u
1
l
2
= |u| cos = ue
2
= u
2
lo cual nos da el significado geomtrico de las componentes contravariantes y covariantes
de un vector en una base dada.
8. FORMA BILINEAL FUNDAMENTAL EN LA BASE RECPROCA.
Sea e
i
una base del espacio y e
i
su recproca. De acuerdo con (38) dados dos vectores u y
v se podrn expresar como:
u = u
i
e
i
v = v
i
e
i
Y por tanto su producto escalar ser:
uv = (u
i
e
i
)(v
j
e
j
) = u
i
v
j
e
i
e
j
(39)
As, el producto escalar de dos vectores queda, tambin como una forma bilineal de las
componentes covariantes de los vectores en la base e
i
, de modo que los coeficientes de
15
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
dicha forma son los productos escalares de los vectores de su base recproca. Llamando
i j
a dichos coeficientes es:
i j
= e
i
e
j
Teniendo en cuenta (30), operando en la expresin anterior queda:
i j
= (g
i k
e
k
)e
j
= g
i k
e
k
e
j
= g
i k
= g
j
k
i j
O sea que los coeficientes de la forma bilineal fundamental en la base recproca de una
base dada son los de la matriz inversa de la matriz de Gram en la base dada. En trminos
exclusivamente matriciales ello significa que la matriz de Gram en la base recproca de una
base dada es la inversa de la matriz de Gram en la base dada.
As, finalmente, la expresin del producto escalar de dos vectores, de (39), puede
expresarse definitivamente como:
uv = g
i j
u
i
v
j
(40)
que es una expresin alternativa a la (6) para el clculo del producto escalar de dos
vectores.
Para un espacio vectorial eucldeo de dimensin 3, tendremos:
uv = g
i j
u
i
v
j
=
= g
11
u
1
v
1
+ g
12
u
1
v
2
+ g
13
u
1
v
3
+ g
21
u
2
v
1
+ g
22
u
2
v
2
+ g
23
u
2
v
3
+ g
31
u
3
v
1
+ g
32
u
3
v
2
+ g
33
u
3
v
3
En lenguaje matricial (6) queda:
uv = (u
i
) G
-1
{v
j
} (41)
Para un espacio vectorial eucldeo de dimensin 3, tendremos:
uv = (u
1
u
2
u
3
) = (u
1
33 32 31
23 22 21
13 12 11
g g g
g g g
g g g
3
2
1
v
v
v
1
u
2
u
3
)
33 32 31
23 22 21
13 12 11
g g g
g g g
g g g
3
2
1
v
v
v
9. RELACIN ENTRE BASES RECPROCAS FRENTE A CAMBIOS DE BASE.
Sea un cambio de base como el definido por (9) y (10)
e
i
= e
i
i
A
i
(9)
e
i
= e
i
i
A
i
(10)
Entre las correspondientes bases recprocas quedarn establecidas unas relaciones como
las siguientes:
e
i
= e
i
i
B
i
(42)
e
i
= e
i
i
B
i
(43)
16
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
Si en (42) se efecta el producto escalar, en ambos miembros, por un vector cualquiera de
la base nueva y se tiene en cuenta (9), resulta:
e
i
e
j
= ( e
i
i
B
i
)e
j
= ( e
i
i
B
i
)( e
j
j
A
j
) = e
i
i
B
j
j
A
i
e
j
de modo que recordando ahora (27) (e
i
e
j
= ) el resultado es:
j
i
i
j
= =
i
i
B
j
j
A
i
j
i
i
B
j
j
A
lo cual significa, recordando lo visto en el ltimo apartado del tema anterior, que:
i
i
B =
i
i
A
y de igual forma:
i
i
B =
i
i
A
Por ello, a partir de ahora (42) y (43) se escribirn:
e
i
= e
i
i
A
i
(44)
e
i
= e
i
i
A
i
(45)
Para un espacio vectorial eucldeo de dimensin 3, tendremos las siguientes expresiones:
e
1
= e
1
i
A
i
= e
1
1
A
1
+ e
1
2
A
2
+ e
1
3
A
3
e
2
= e
2
i
A
i
= e
2
1
A
1
+ e
2
2
A
2
+ e
2
3
A
3
e
3
= e
3
i
A
i
= e
3
1
A
1
+ e
3
2
A
2
+ e
3
3
A
3
y:
e
1
= e
1
i
A
i
= e
1
1
A
1
+ e
1
2
A
2
+ e
1
3
A
3
e
2
= e
2
i
A
i
= e
2
1
A
1
+ e
2
2
A
2
+ e
2
3
A
3
e
3
= e
3
i
A
i
= e
3
1
A
1
+ e
3
2
A
2
+ e
3
3
A
3
La obtencin de (44) y (45) permite, por otra parte, determinar la relacin entre los n
2
nmeros reales g
i j
y los g
i j
correspondientes a dos bases, antigua y nueva
respectivamente. En efecto:
g
i j
= e
i
e
j
= ( e
i
i
A
i
)( e
j
j
A
j
) = e
i
i
A
j
j
A
i
e
j
= g
i
i
A
j
j
A
i j
(46)
17
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
10. BASES ORTONORMALES.
Resulta interesante particularizar todos los anlisis anteriores al caso en que las bases
consideradas en el espacio eucldeo sean ortonormales.
En efecto, si e
i
es ortonormal los coeficientes de la forma bilineal fundamental son:
g
i j
=
i j
(G = I)
y, por tanto, los inversos son:
g
i j
=
i j
(G
-1
= I)
As, aplicando las expresiones (17) o (22) se obtiene un primer resultado que es:
v
i
= v
i
Es decir que en una base ortonormal las componentes contravariantes y covariantes
de cualquier vector coinciden.
Del mismo modo si se aplican las expresiones (30) o (33) se obtiene, adicionalmente, que:
e
i
= e
i
Es decir que toda base ortonormal es autorrecproca o recproca de s misma.
Por todo ello resulta, finalmente, que la expresin de la forma bilineal fundamental es:
uv = u
i
v
i
= (s se prefiere) = u
i
v
i
Respecto a los anlisis efectuados en torno a los cambios de base hay que tener en cuenta
que si tanto la base antigua como la nueva son ortonormales, la matriz del cambio de base
es ortogonal. Es decir:
A
-1
= A
T
18
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
11. CUESTIONES TERICAS Y PRCTICAS.
1. Recordando las propiedades axiomticas de la conexin interna (producto escalar o
producto interno) de un espacio vectorial eucldeo, establecer las caractersticas de la
matriz G.
2. Desarrollar matricialmente de manera terica la expresin del producto escalar de dos
vectores a, b del espacio vectorial eucldeo E
4
, expresados en una base cualquiera e
i
de
dicho espacio eucldeo. Partiendo de la expresin (3) y aplicando las correspondientes
propiedades realizar el desarrollo hasta llegar a una expresin del tipo (7).
3. En un espacio eucldeo E
n
dados los vectores a, b y c en sus componentes
contravariantes a
i
, b
i
, c
i
, en una cierta base e
i
, interpretar las expresiones algebraicas
siguientes:
a
i
g
i j
b
j
c
k
a
i
g
i j
a
j
b
k
a
i
b
k
g
i j
c
j
(siendo g
i j
los coeficientes de la forma bilineal fundamental en la base e
i
).
4. En el espacio eucldeo E
n
, referido a una base e
i
, obtener la base recproca de
la recproca. Coincide con la base original?.
5. Estudiar como son las componentes g
i j
y g
i j
en el caso de que la base e
i
sea ortogonal.
6. Demostrar que las siguientes expresiones tambin definen el producto escalar de dos
vectores:
uv = u
i
v
i
= u
i
v
i
as como sus correspondientes expresiones matriciales:
uv = (u
i
) {v
i
} = (u
i
) {v
i
}
7. Traducir a lenguaje matricial las siguientes expresiones:
e
i
= e
i
i
A
i
e
i
= e
i
i
A
i
8. Traducir al lenguaje matricial la siguiente expresin de cambio de base de la matriz de
Gram:
g
i j
= g
i
i
A
j
j
A
i j
9. Si la base nueva e
i
y la base antigua e
i
son ortonormales, se cumple que: A
-1
= A
T
.
Aplicando esta propiedad, demostrar que las expresiones relativas a los cambios de
base conducen a que en la nueva base ortonormal resulta que:
v
i
= v
i
e
i
= e
i
g
i j
=
i j
g
i j
=
i j
19
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
12. EJEMPLOS PRCTICOS.
1. Interpretacin geomtrica de las componentes covariantes y contravariantes en el caso
concreto de una base dada e
i
unitaria en el espacio eucldeo E
2
, siendo:
Para la resolucin vamos a recurrir al mismo ejemplo que en el apartado 7, pero de
forma numrica, as pues, partimos de un cierto vector u en una base dada {e
i
},
formada esta por dos vectores unitarios, e
1
y e
2
, esto es
1
e = 1 y
2
e = 1, siendo
definidos respecto al sistema cartesiano de referencia en dos dimensiones:
e
1
= 1 cos25 i - 1 sen25 j
e
2
= 0 i + 1 j
= 115
Tomando ahora un cierto vector u de mdulo u = 4, que forma un ngulo de 15
respecto del eje x, podemos representar todo lo anterior:
e1
e2
u
1
1
4
25
15
formando con la base unitaria del espacio vectorial eucldeo E
2
, 40 respecto del
vector e
1
y 75 respecto del vector e
2
.
As pues podemos escribir:
u = (4 cos15) i + (4 sen15) j
u = l
1
e
1
+ l
2
e
2
20
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
sustituyendo en esta ltima expresin, obtendremos dos ecuaciones de donde
podemos despejar l
1
y l
2
:
u = (4 cos15) i + (4 sen15) j
u = l
1
(1 cos25 i - 1 sen25 j) + l
2
(0 i + 1 j) = l
1
cos25 i + (l
2
- l
1
sen25) j
4 cos 15 = l
1
cos25
25 cos
15 cos 4
l
1
=
4 sen15 = l
2
- l
1
sen25 = 25 sen l 15 sen 4 l
1 2
+ = 25 sen
25 cos
15 cos 4
15 sen 4 +
l
2
= 25 tan 15 cos 4 15 sen 4 +
siendo l
1
y l
2
longitudes de las componentes contravariantes del vector u en la base
formada por e
1
y e
2
.
25 cos
15 cos 4
l
1
= = 4,263 = u
1
l
2
= 25 tan 15 cos 4 15 sen 4 + = 2,837 = u
2
Por otra parte las componentes covariantes del vector u en la base formada por e
1
y
e
2
, se definen como el producto escalar entre el vector u y cada uno de los vectores
que integran la base del espacio vectorial en el que nos encontramos, as pues:
u
1
= u e
1
= u
1
e cos40 = 4 cos40 = 3,064 = l
1
u
2
= u e
2
= u
2
e cos75 = 4 cos75 = 1,035 = l
2
21
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
2. En el espacio vectorial R
3
(R) se define un producto escalar mediante la expresin:
xy = x
1
y
1
+ 2 x
2
y
2
+ 2 x
3
y
3
- x
1
y
3
- x
3
y
1
Siendo:
x = (x
1
x
2
x
3
) e y = (y
3
2
1
e
e
e
1
y
2
y
3
) con x e y R
3
2
1
e
e
e
3
(R)
Se pide:
1. Componentes de la matriz de Gram en la base {e
i
}.
2. Dados los vectores: a = (1 -1 1) {e
i
} y b = (2 0 1) {e
i
}, obtener su norma, mdulo,
conexin interna, y ngulo que forman entre s.
3. Componentes covariantes de los vectores a y b en la base {e
i
}.
4. Componentes covariantes de los vectores {e
1
, e
2
, e
3
} en la base {e
i
}.
5. Dado el vector c = (0 1 1) {e
i
}, obtener la forma bilineal fundamental en la base
{a, b, c}.
6. Dado el vector z = (1 0 2) por sus componentes covariantes en la base {e
i
}, obtener
sus componentes contravariantes en la base {a, b, c}.
7. Obtener la base recproca de la constituida por los vectores {a, b, c} expresndola en
la base {e
i
}.
8. Obtener la base recproca de la constituida por los vectores {e
i
} expresndola en la
base {a, b, c}.
9. Considerando el subespacio vectorial eucldeo E
2
formado por los vectores {a, b};
determinar la base recproca, en E
2
de {a, b}, expresndola por sus coordenadas en
la base {e
i
} de R
3
(R).
En primer lugar debemos de comprobar que la anterior conexin interna define un
producto escalar, para ello deberemos verificar que cumple las propiedades
axiomticas del producto escalar:
I. xy = yx (conmutatividad).
II. x( y + z) = (xy) + (xz) (bilinealidad).
III. xx 0, xx = 0 x = 0 (definida estrictamente positiva).
I. xy = x
1
y
1
+ 2 x
2
y
2
+ 2 x
3
y
3
- x
1
y
3
- x
3
y
1
yx = y
1
x
1
+ 2 y
2
x
2
+ 2 y
3
x
3
- y
1
x
3
- y
3
x
1
Se ve claramente que ambas expresiones son iguales, por lo tanto cumple la
propiedad conmutativa.
22
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
II. x( y + z) = (xy) + (xz) (bilinealidad).
x( y + z) =
= x
1
( y
1
+ z
1
) + 2 x
2
( y
2
+ z
2
) + 2 x
3
( y
3
+ z
3
) - x
1
( y
3
+ z
3
) - x
3
( y
1
+ z
1
) =
=
x
1
y
1
+
x
1
z
1
+ 2
x
2
y
2
+ 2
x
2
z
2
+ 2
x
3
y
3
+ 2
x
3
z
3
-
x
1
y
3
-
x
1
z
3
-
x
3
y
1
-
x
3
z
1
=
=
(x
1
y
1
+ 2
x
2
y
2
+ 2
x
3
y
3
- x
1
y
3
- x
3
y
1
) +
(x
1
z
1
+ 2
x
2
z
2
+ 2
x
3
z
3
- x
1
z
3
- x
3
z
1
) =
=
(xy) +
(xz)
Por lo tanto cumple la bilinealidad.
III. xx 0, xx = 0 x = 0 (definida estrictamente positiva).
xx = x
1
x
1
+ 2 x
2
x
2
+ 2 x
3
x
3
- x
1
x
3
- x
3
x
1
= (x
1
)
2
+ 2 (x
2
)
2
+ 2 (x
3
)
2
- 2 x
1
x
3
=
= (x
1
)
2
- 2 x
1
x
3
+ (x
3
)
2
+ 2 (x
2
)
2
+ (x
3
)
2
= (x
1
- x
3
)
2
+ 2 (x
2
)
2
+ (x
3
)
2
Como (x
1
- x
3
)
2
0, 2 (x
2
)
2
0, (x
3
)
2
0 xx 0
1. Componentes de la matriz de Gram en la base {e
i
}.
El producto escalar de dos vectores queda definido por el doble sumatorio:
xy = x
i
y
j
g
i j
=
= g
1 1
x
1
y
1
+ g
1 2
x
1
y
2
+ g
1 3
x
1
y
3
+
+ g
2 1
x
2
y
1
+ g
2 2
x
2
y
2
+ g
2 3
x
2
y
3
+
+ g
3 1
x
3
y
1
+ g
3 2
x
3
y
2
+ g
3 3
x
3
y
3
Identificando coeficientes entre las expresiones que figuran en el punto 2 del tema y
la expresin del producto escalar dada en el enunciado:
xy = x
1
y
1
+ 2 x
2
y
2
+ 2 x
3
y
3
- x
1
y
3
- x
3
y
1
Podemos escribir
[g
i j
] = G =
2 0 1 -
0 2 0
1 - 0 1
Por definicin: g
i j
= e
i
e
j
.
Podramos obtener estas componentes, realizando los correspondientes productos
escalares entre los vectores {e
i
}. Como las componentes contravariantes de e
1
, e
2
y e
3
en la base {e
i
} son respectivamente (1 0 0), (0 1 0) y (0 0 1), por ejemplo
tenemos:
g
1 1
= e
1
e
1
= 11 + 200 + 200 - 10 - 01 = 1
g
2 3
= e
2
e
3
= 00 + 210 + 201 - 01 - 00 = 0
23
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
etc ...
2. Dados los vectores: a = (1 -1 1) {e
i
} y b = (2 0 1) {e
i
}, obtener su norma, mdulo,
conexin interna, y ngulo que forman entre s.
La expresin matricial de la conexin interna es:
xy = (x
1
x
2
x
3
)
2 0 1 -
0 2 0
1 - 0 1
3
2
1
y
y
y
Tanto las componentes x
i
del vector x, como las y
i
del vector y deben de referirse a
la misma base en que est expresado el tensor mtrico fundamental G.
La aplicamos al clculo de:
Norma de a:
N(a) = aa = (a
1
a
2
a
3
) = (1 -1 1) = (1 -1 1) = 3
2 0 1 -
0 2 0
1 - 0 1
3
2
1
a
a
a
2 0 1 -
0 2 0
1 - 0 1
1
1 -
1
1
2 -
0
Norma de b:
N(b) = bb = (b
1
b
2
b
3
) = (2 0 1) = (2 0 1) = 2
2 0 1 -
0 2 0
1 - 0 1
3
2
1
b
b
b
2 0 1 -
0 2 0
1 - 0 1
1
0
2
0
0
1
Conexin interna:
ab = (a
1
a
2
a
3
) = (1 -1 1) = (1 -1 1) = 1
2 0 1 -
0 2 0
1 - 0 1
3
2
1
b
b
b
2 0 1 -
0 2 0
1 - 0 1
1
0
2
0
0
1
Los mdulos:
a = + ) ( N a = 3
b = + ) ( N b = 2
ngulo que forman:
cos
a b
=
b a
b a
=
2 3
1
=
6
1
24
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
a b
= arccos
6
1
3. Componentes covariantes de los vectores a y b en la base {e
i
}.
Las componentes covariantes de un vector x = x
i
e
i
, en una base {e
i
}, se definen por
los siguientes productos escalares:
x
i
= xe
i
Desarrollando esta expresin:
x
i
= (x
i
e
i
)e
j
= x
i
e
i
e
j
= x
i
g
i j
Matricialmente expresada:
(x
1
x
2
x
3
) = (x
1
x
2
x
3
) = (x
33 32 31
23 22 21
13 12 11
g g g
g g g
g g g
1
x
2
x
3
)
2 0 1 -
0 2 0
1 - 0 1
Vector a:
(a
1
a
2
a
3
) = (a
1
a
2
a
3
) = (1 -1 1) = (0 -2 1)
33 32 31
23 22 21
13 12 11
g g g
g g g
g g g
2 0 1 -
0 2 0
1 - 0 1
Vector b:
(b
1
b
2
b
3
) = (b
1
b
2
b
3
) = (2 0 1) = (1 0 0)
33 32 31
23 22 21
13 12 11
g g g
g g g
g g g
2 0 1 -
0 2 0
1 - 0 1
Como las componentes covariantes de un vector en una base, son las componentes
contravariantes del mismo vector en la base recproca de la dada, podemos expresar:
a = e
1
- e
2
+ e
3
= - 2 e
2
+ e
3
b = 2 e
1
+ e
3
= e
1
Donde {e
i
} es la base recproca de la {e
i
}.
4. Componentes covariantes de los vectores {e
1
, e
2
, e
3
} en la base {e
i
}.
Como las componentes contravariantes de e
1
, e
2
y e
3
en la base {e
i
} son
respectivamente (1 0 0), (0 1 0) y (0 0 1), las covariantes sern:
Vector e
1
:
25
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
e
1
= (1 0 0) = (1 0 -1)
2 0 1 -
0 2 0
1 - 0 1
Vector e
2
:
e
2
= (0 1 0) = (0 2 0)
2 0 1 -
0 2 0
1 - 0 1
Vector e
3
:
e
3
= (0 0 1) = (-1 0 2)
2 0 1 -
0 2 0
1 - 0 1
Esto es; las componentes covariantes de cada uno de los vectores de la base son
las propias columnas (o filas) de la matriz G.
5. Dado el vector c = (0 1 1) {e
i
}, obtener la forma bilineal fundamental en la base
{a, b, c}.
La forma bilineal fundamental no es sino la expresin del producto escalar, en la que
desarrollamos el doble sumatorio x
i
y
j
g
i j
. As, la forma bilineal fundamental, en la base
{e
i
} queda:
x
1
y
1
+ 2 x
2
y
2
+ 2 x
3
y
3
- x
1
y
3
- x
3
y
1
Veamos si los vectores {a, b, c} constituyen una base:
det = 0 + 0 + 2 - 0 - (- 2) - 1 = 3 0 ; luego s son una base del e.v. R
1 1 0
1 0 2
1 1 - 1
3
(R).
Necesitamos conocer las componentes de la forma bilineal fundamental en la base
{a, b, c}:
Llamando {e
i
} a la base {a, b, c}:
a = 1 e
1
- 1 e
2
+ 1 e
3
b = 2 e
1
+ 0 e
2
+ 1 e
3
c = 0 e
1
+ 1 e
2
+ 1 e
3
26
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
e
i
= e
i
i
A
i
= A = [ ] = y A
1 1 0
1 0 2
1 1 - 1
3
2
1
e
e
e
i
i
A
1 1 0
1 0 2
1 1 - 1
T
=
1 1 1
1 0 1 -
0 2 1
g
i j
= g
i
i
A
j
j
A
i j
Matricialmente quedar:
G= A G A
T
G= = =
1 1 0
1 0 2
1 1 - 1
2 0 1 -
0 2 0
1 - 0 1
1 1 1
1 0 1 -
0 2 1
1 1 0
1 0 2
1 1 - 1
2 0 1
2 0 2 -
1 - 1 0
4 0 1 -
0 2 1
1 - 1 3
Estas componentes se podran obtener tambin realizando los correspondientes
productos escalares e
i
e
j
. As por ejemplo:
g
1 1
= e
1
e
1
= 11 + 2(-1)(-1) + 211 -11 - 11 = 3
g
1 2
= e
1
e
2
= 12 + 2(-1)0 + 211 -11 - 12 = 1
g
1 3
= e
1
e
3
= 10 + 2(-1)1 + 211 -11 - 10 = -1
etc ...
y la forma bilineal fundamental:
3 x
1
y
1
+ 2 x
2
y
2
+ 4 x
3
y
3
+ x
1
y
2
+ x
2
y
1
- x
1
y
3
- x
3
y
1
donde x
i
, y
j
son las componentes contravariantes de los vectores x e y en la base
{a, b, c}.
6. Dado el vector z = (1 0 2) por sus componentes covariantes en la base {e
i
}, obtener sus
componentes contravariantes en la base {a, b, c}.
Podemos obtenerlas por dos caminos diferentes:
a) Obtener las componentes contravariantes en la base {e
i
}, y posteriormente
cambiar de base estas ltimas.
x
i
= g
i j
x
j
que matricialmente queda: {x
i
} = G
-1
{x
j
} (x
i
) = (x
j
) G
-1
x
i
= x
i
i
A
i
que matricialmente queda: (x
i
) = (x
i
) A
-1
= (x
j
) G
-1
A
-1
operando, nos queda:
27
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
G
-1
= [g
i j
] =
1 0 1
0 0
1 0 2
2
1
A
-1
= [ ] =
i
i
A
3
2
3
1
3
2
3
1
3
1
3
2
3
1
3
2
3
1
-
-
- -
(x
1
x
2
x
3
) = (x
1
x
2
x
3
) =
33 32 31
23 22 21
13 12 11
g g g
g g g
g g g
3
3
2
3
1
3
3
2
2
2
1
2
3
1
2
1
1
1
A A A
A A A
A A A
= (1 0 2)
1 0 1
0 0
1 0 2
2
1
3
2
3
1
3
2
3
1
3
1
3
2
3
1
3
2
3
1
-
-
- -
= (1 0 2)
3
1
3
1
3
1
6
1
6
1
3
1
-
0 1 0
= ( )
3
2
3
5
3
2
b) Obtener las componentes covariantes en {a, b, c} y posteriormente las
contravariantes en esta misma base.
x
i
= x
i
i
A
i
que matricialmente queda: {x
i
} = A {x
i
}
x
i
= g
i j
x
j
que matricialmente queda: {x
i
} = (G)
-1
{x
j
} = (G)
-1
A {x
j
}
Como conocemos G = podemos obtener (G)
4 0 1 -
0 2 1
1 - 1 3
-1
=
18
5
18
1
18
2
18
1
18
11
18
4
18
2
18
4
18
8
-
- -
-
Finalmente operando, nos queda:
3
2
1
x
x
x
= =
3 3 2 3 1 3
3 2 2 2 1 2
3 1 2 1 1 1
g g g
g g g
g g g
3
3
2
3
1
3
3
2
2
2
1
2
3
1
2
1
1
1
A A A
A A A
A A A
3
2
1
x
x
x
=
18
5
18
1
18
2
18
1
18
11
18
4
18
2
18
4
18
8
-
- -
-
=
1 1 0
1 0 2
1 1 - 1
2
0
1
3
1
6
1
3
1
6
1
3
1
3
1
- 0
1
- 0
=
2
0
1
3
2
3
5
3
2
7. Obtener la base recproca de la constituida por los vectores {a, b, c} expresndola en la
base {e
i
}.
Dada una base {e
i
}, su base recproca {e
i
} es aquella que verifica el siguiente sistema
de ecuaciones:
28
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
e
i
e
j
=
j
i
Siendo las funciones Deltas de Kronecker.
j
i
Sea u = u
i
e
i
; v = v
i
e
i
; w = w
i
e
i
la base recproca de la base {a, b, c}.
Como conocemos las componentes contravariantes de los vectores a, b, c en la base
{e
i
}:
a = (a
1
a
2
a
3
) {e
i
} = (1 -1 1) {e
i
}
b = (b
1
b
2
b
3
) {e
i
} = (2 0 1) {e
i
}
c = (c
1
c
2
c
3
) {e
i
} = (0 1 1) {e
i
}
Y la expresin de la forma bilineal fundamental:
a u = a
i
u
j
g
i j
= (a
i
) G {u
j
} = (1 -1 1)
2 0 1 -
0 2 0
1 - 0 1
3
2
1
u
u
u
Aplicando e
i
e
j
= obtendremos:
j
i
1 1 0
1 0 2
1 1 - 1
=
2 0 1 -
0 2 0
1 - 0 1
3 3 3
2 2 2
1 1 1
w v u
w v u
w v u
1 0 0
0 1 0
0 0 1
De donde, despejando la matriz de incgnitas obtenemos las componentes
contravariantes de la base recproca de la (a b c) en la base {e
i
}.
3 3 3
2 2 2
1 1 1
w v u
w v u
w v u
=
1 0 1
0 0
1 0 2
2
1
3
2
3
1
3
2
3
1
3
1
3
2
3
1
3
2
3
1
-
-
- -
=
1 0 0
0 1 0
0 0 1
=
1 0 1
0 0
1 0 2
2
1
3
2
3
1
3
2
3
1
3
1
3
2
3
1
3
2
3
1
-
-
- -
=
3
1
3
1
3
1
6
1
6
1
3
1
-
0 1 0
u = u
i
e
i
= -
3
1
e
2
+
3
1
e
3
v = v
i
e
i
= e
1
+
6
1
e
2
+
3
1
e
3
w = w
i
e
i
=
6
1
e
2
+
3
1
e
3
29
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
8. Obtener la base recproca de la constituida por los vectores {e
i
} expresndola en la base
{a, b, c}.
Los vectores a determinar son:
e
1
= e
1 i
e
i
= e
1 i
e
i
e
2
= e
2 i
e
i
= e
2 i
e
i
e
3
= e
3 i
e
i
= e
3 i
e
i
Siendo (e
i
) = (a b c)
Sabemos que las componentes contravariantes de {e
i
} en si misma son (1 0 0), (0 1 0),
(0 0 1) respectivamente.
Y que la expresin de la forma bilineal fundamental es:
e
1
e
1
= e
1
i
e
1 j
g
i j
= (e
1
i
) G {e
1 j
} = (1 0 0)
2 0 1 -
0 2 0
1 - 0 1
13
12
11
e
e
e
Aplicando la expresin e
i
e
j
= obtenemos:
j
i
1 0 0
0 1 0
0 0 1
=
2 0 1 -
0 2 0
1 - 0 1
33 23 13
32 22 12
31 21 11
e e e
e e e
e e e
1 0 0
0 1 0
0 0 1
De donde al despejar la matriz de incgnitas obtenemos las componentes
contravariantes, en la base {e
i
}, de los vectores que constituyen la base recproca {e
i
}
de la base {e
i
}.
2 0 1 -
0 2 0
1 - 0 1
=
33 23 13
32 22 12
31 21 11
e e e
e e e
e e e
1 0 0
0 1 0
0 0 1
33 23 13
32 22 12
31 21 11
e e e
e e e
e e e
=
1 0 1
0 0
1 0 2
2
1
= G
-1
Se comprueba que las componentes buscadas coinciden con las de la matriz inversa
de la matriz de Gram.
Si ahora lo que queremos calcular son las componentes contravariantes de los
vectores que constituyen la base recproca {e
i
} de la base {e
i
}, en la base {a, b, c},
efectuaremos el cambio de base.
30
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
x
i
= x
i
i
A
i
y en forma matricial (x
i
) = (x
i
) A
-1
Como
a = 1 e
1
- 1 e
2
+ 1 e
3
b = 2 e
1
+ 0 e
2
+ 1 e
3
c = 0 e
1
+ 1 e
2
+ 1e
3
y
e
i
= e
i
i
A
i
[ ] = A = y [ ] = A
i
i
A
1 1 0
1 0 2
1 1 - 1
i
i
A
-1
=
3
2
3
1
3
2
3
1
3
1
3
2
3
1
3
2
3
1
-
-
- -
tenemos que
(e
1 i
) = (e
1 i
) A
-1
(e
1 1
e
1 2
e
1 3
) = (e
1 1
e
1 2
e
1 3
) A
-1
= (2 0 1)
3
2
3
1
3
2
3
1
3
1
3
2
3
1
3
2
3
1
-
-
- -
luego
33 32 31
23 22 21
13 12 11
e e e
e e e
e e e
=
33 32 31
23 22 21
13 12 11
e e e
e e e
e e e
3
2
3
1
3
2
3
1
3
1
3
2
3
1
3
2
3
1
-
-
- -
=
=
1 0 1
0 0
1 0 2
2
1
3
2
3
1
3
2
3
1
3
1
3
2
3
1
3
2
3
1
-
-
- -
=
3
1
3
1
3
1
6
1
6
1
3
1
-
0 1 0
e
1
= 0 a + 1 b + 0 c = b
e
2
= -
3
1
a +
6
1
b +
6
1
c
e
1
=
3
1
a +
3
1
b +
3
1
c
9. Considerando el subespacio vectorial eucldeo E
2
formado por los vectores {a, b};
determinar la base recproca, en E
2
de {a, b}, expresndola por sus coordenadas en la
base {e
i
} de R
3
(R).
Sean u = u
i
e
i
; v = v
i
e
i
los vectores buscados.
Se deben cumplir las siguientes relaciones:
31
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
a u = 1 ; b u = 0
a v = 0 ; b v = 1
Matricialmente:
b
a
G [ ] = = v u
1 0 2
1 1 - 1
2 0 1 -
0 2 0
1 - 0 1
3 3
2 2
1 1
v u
v u
v u
1 0
0 1
0 0 1
1 2 - 0
= =
3 3
2 2
1 1
v u
v u
v u
+ +
1 1
3 2 3 2
v u
v v 2 - u u 2 -
1 0
0 1
Necesitamos dos condiciones ms:
u, v E
2
; luego:
u =
1
a +
2
b
v =
1
a +
2
b
con
i
y
j
R
Por ser linealmente dependientes de los vectores a y b, podemos asegurar que:
det = 0 - u
3 2 1
u u u
1 0 2
1 1 - 1
1
+ 2 u
2
- (-2) u
3
- u
2
= 0 - u
1
+ u
2
+ 2 u
3
= 0
det = 0 - v
3 2 1
v v v
1 0 2
1 1 - 1
1
+ 2 v
2
- (-2) v
3
- v
2
= 0 - v
1
+ v
2
+ 2 v
3
= 0
Resolviendo el sistema de 6 ecuaciones y 6 incgnitas planteado:
- 2 u
2
+ u
3
= 1
- 2 v
2
+ v
3
= 0
u
1
= 0
v
1
= 1
- u
1
+ u
2
+ 2 u
3
= 0
- v
1
+ v
2
+ 2 v
3
= 0
Obtenemos:
32
FUNDAMENTOS FSICOS DE LAS TCNICAS - 4 ICCP TEMA 2 - VECTORES EN ESPACIOS VECTORIALES EUCLDEOS
u
1
= 0 ; u
2
= -
5
2
; u
3
=
5
1
v
1
= 1 ; v
2
=
5
1
; v
3
=
5
2
u = -
5
2
e
2
+
5
1
e
3
v = e
1
+
5
1
e
2
+
5
2
e
3
Ntese que cualquier vector perteneciente a E
2
es combinacin lineal de a y b; y que
por tanto, el producto escalar de dos vectores cualesquiera de E
2
queda definido de
la siguiente forma:
x, y E
2
x = x
1
a + x
2
b
y = y
1
a + y
2
b
x y = (x
1
x
2
)
a a a b
b a a a
2
1
y
y
Por tanto, si u = u
1
a + u
2
b y v = v
1
a + v
2
b, son la base recproca, en E
2
,
de los vectores a y b, se verifica:
1 0
0 1
=
a a a b
b a a a
2 2
1 1
v u
v u
1 0
0 1
2 2
1 1
v u
v u
= = =
1
a a a b
b a a a
1
2 1
1 3
5
3
5
1
5
1
5
2
-
-
Luego
u =
5
2
a -
5
1
b
v = -
5
1
a +
5
3
b
Que en la base {e
i
}:
u =
5
2
(e
1
- e
2
+ e
3
) -
5
1
(2 e
1
+ e
3
) = -
5
2
e
2
+
5
1
e
3
v = -
5
1
(e
1
- e
2
+ e
3
) +
5
3
(2 e
1
+ e
3
) = e
1
+
5
1
e
2
+
5
2
e
3
33
S-ar putea să vă placă și
- Tema 1Document13 paginiTema 1angelpererezarroyoÎncă nu există evaluări
- Práctica 1 SAP2000Document47 paginiPráctica 1 SAP2000Matías MartínezÎncă nu există evaluări
- Práctica 7 SAP2000Document15 paginiPráctica 7 SAP2000Matías MartínezÎncă nu există evaluări
- Práctica 2 SAP2000Document24 paginiPráctica 2 SAP2000Matías Martínez0% (1)
- Práctica 5 SAP2000Document21 paginiPráctica 5 SAP2000Matías MartínezÎncă nu există evaluări
- Práctica 6 SAP2000Document13 paginiPráctica 6 SAP2000Matías MartínezÎncă nu există evaluări
- Parte1 Sucesos Aleatorios 2018 19Document10 paginiParte1 Sucesos Aleatorios 2018 19Matías MartínezÎncă nu există evaluări
- Tema 1 Obras Costeras IntroducciónDocument30 paginiTema 1 Obras Costeras IntroducciónMatías MartínezÎncă nu există evaluări
- Contrato Compraventa VehículoDocument1 paginăContrato Compraventa VehículoMatías MartínezÎncă nu există evaluări
- Ejercicios para Resolver Limites y ContinuidadDocument4 paginiEjercicios para Resolver Limites y Continuidadalarico1000Încă nu există evaluări
- SUCESIONESDocument5 paginiSUCESIONESMatías MartínezÎncă nu există evaluări
- Analisis ArriostramientosDocument7 paginiAnalisis ArriostramientosAlexis VargasÎncă nu există evaluări
- Ejercicios Numeros Complejos PDFDocument11 paginiEjercicios Numeros Complejos PDFDamari Campos SalgadoÎncă nu există evaluări
- Tema 2Document28 paginiTema 2Matías MartínezÎncă nu există evaluări
- Ejercicios Resueltos LogaritmosDocument20 paginiEjercicios Resueltos LogaritmosRuben Vasquez CespedesÎncă nu există evaluări
- Analisis Sismico de PresasDocument45 paginiAnalisis Sismico de PresasmapasabcÎncă nu există evaluări
- Predimensionamiento de Puentes Mixtos Tipo Cajón. - EstructurandoDocument4 paginiPredimensionamiento de Puentes Mixtos Tipo Cajón. - EstructurandoMatías MartínezÎncă nu există evaluări
- Tema3 2014Document22 paginiTema3 2014Matías MartínezÎncă nu există evaluări
- Criterios de PlasticidadDocument23 paginiCriterios de PlasticidadMatías MartínezÎncă nu există evaluări
- Tema0 PDFDocument21 paginiTema0 PDFMatías MartínezÎncă nu există evaluări
- Tema 3Document18 paginiTema 3Matías MartínezÎncă nu există evaluări
- MMC Tema8Document13 paginiMMC Tema8Matías MartínezÎncă nu există evaluări
- Tema 5Document26 paginiTema 5Matías MartínezÎncă nu există evaluări
- Criterios de PlasticidadDocument23 paginiCriterios de PlasticidadMatías MartínezÎncă nu există evaluări
- Concreto Pretensado y Postensado PDFDocument155 paginiConcreto Pretensado y Postensado PDFJose Alberto Cabrera100% (1)
- Criterios de PlasticidadDocument23 paginiCriterios de PlasticidadMatías MartínezÎncă nu există evaluări
- Criterios de PlasticidadDocument23 paginiCriterios de PlasticidadMatías MartínezÎncă nu există evaluări
- CuantiasDocument10 paginiCuantiasWalter Hernan Aguilar MolinaÎncă nu există evaluări
- Algoritmia: Del Análisis Del Problema Al CódigoDocument373 paginiAlgoritmia: Del Análisis Del Problema Al CódigoDiego Fernando Arteaga LeonÎncă nu există evaluări
- Material de Apoyo Unidad III M2 02-2021Document37 paginiMaterial de Apoyo Unidad III M2 02-2021Julio Osmin Peña MartinezÎncă nu există evaluări
- Parabola EcuacionesDocument8 paginiParabola EcuacionesGustavo David Reto CespedesÎncă nu există evaluări
- Proyecto de Aula N.3Document4 paginiProyecto de Aula N.3diego roa100% (1)
- Colgesan Guia 09 Talleresmat 11 S 2Document4 paginiColgesan Guia 09 Talleresmat 11 S 2Cristian Libardo Quintero CastañedaÎncă nu există evaluări
- MARTES A - SESIÓN Y FICHA - Expresamos Cantidades Con Números DecimalesDocument10 paginiMARTES A - SESIÓN Y FICHA - Expresamos Cantidades Con Números DecimalesSonia Margot Ascona Conislla100% (3)
- SimulacionDocument18 paginiSimulacionTony CanTamÎncă nu există evaluări
- Guía Matematica 5° Basico Área y Perímetro (x2)Document4 paginiGuía Matematica 5° Basico Área y Perímetro (x2)Alex PeñaÎncă nu există evaluări
- Informe Nº2 Hidraulica FluvialDocument18 paginiInforme Nº2 Hidraulica FluvialVR LizetÎncă nu există evaluări
- Centro Educativo Juan XxiiiDocument26 paginiCentro Educativo Juan XxiiiFranklin García LloredaÎncă nu există evaluări
- Carpeta de Recuperación Matemática: SecundariaDocument31 paginiCarpeta de Recuperación Matemática: SecundariaBrendaÎncă nu există evaluări
- Estadistica U PacificoDocument114 paginiEstadistica U PacificoEstractovokal Hiphomaniatico DlCrewÎncă nu există evaluări
- Tarea Virtual 8 Continuidad y DerivadaDocument4 paginiTarea Virtual 8 Continuidad y DerivadaNATHALY JESSENIA MUÑOZ GARCIAÎncă nu există evaluări
- Guia Didactica Geogebra TraslacionesDocument9 paginiGuia Didactica Geogebra TraslacionesAlejandra Patricia Meneses PalmaÎncă nu există evaluări
- Modelos Variable de EstadoDocument41 paginiModelos Variable de EstadoJorge GarciaÎncă nu există evaluări
- 12sesion Practica Dirigida Sobre Simetria Centra Ly AxialDocument5 pagini12sesion Practica Dirigida Sobre Simetria Centra Ly AxialAnakin DiazÎncă nu există evaluări
- 3 Corte Ciclo Vi Guia de Trabajo 7 Razon de CambioDocument7 pagini3 Corte Ciclo Vi Guia de Trabajo 7 Razon de CambioInfoCetina100% (1)
- Primer Taller Dinámica 2023 1 Atencia, Ojeda y Verjel Primera RevisiónDocument10 paginiPrimer Taller Dinámica 2023 1 Atencia, Ojeda y Verjel Primera RevisiónALEJANDRO JAVIER ATENCIA FERRERÎncă nu există evaluări
- BC2-Formulario de Geometria Afin EuclideaDocument3 paginiBC2-Formulario de Geometria Afin EuclideaLorena Del Coz RodríguezÎncă nu există evaluări
- Resumen Anr Tesis Materiales Educativos Universidad César VallejoDocument9 paginiResumen Anr Tesis Materiales Educativos Universidad César VallejoKevin CuentasÎncă nu există evaluări
- Jerez (2004) Lecciones de Estadistica (Permutações e Arranjos)Document20 paginiJerez (2004) Lecciones de Estadistica (Permutações e Arranjos)CrónicasÎncă nu există evaluări
- Dimensionamiento de Recipientes de SeparaciónDocument20 paginiDimensionamiento de Recipientes de SeparaciónLuis Angel Briones JuárezÎncă nu există evaluări
- Angulos Geometria DescriptivaDocument8 paginiAngulos Geometria DescriptivaWilman A. CárdenasÎncă nu există evaluări
- Solución Máximos y MínimosDocument6 paginiSolución Máximos y MínimosAngie Hazdlaidy RAMIREZ GALINDOÎncă nu există evaluări
- Conjuntos NumericosDocument24 paginiConjuntos Numericosdaniel andres castañeda molinaÎncă nu există evaluări
- Maria Elena MatosDocument6 paginiMaria Elena MatosCarlos SeijasÎncă nu există evaluări
- Polinomios (Binomios de Newton)Document11 paginiPolinomios (Binomios de Newton)NicoleÎncă nu există evaluări
- Demostracion Sencilla Ultimo Teorema FermatDocument11 paginiDemostracion Sencilla Ultimo Teorema FermatFrancisco TausÎncă nu există evaluări
- Modulo Matematica 3 PDFDocument137 paginiModulo Matematica 3 PDFEmmanuelÎncă nu există evaluări
- OptimizacionDocument5 paginiOptimizacionLucas MundacaÎncă nu există evaluări