S-ar putea să vă placă și
- A Fast Integration Method For Translating-Pulsating Green's Function in Bessho's FormDocument12 paginiA Fast Integration Method For Translating-Pulsating Green's Function in Bessho's FormYuriy KrayniyÎncă nu există evaluări
- KL University, Vaddeswaram, Dept. of ECE, Signal Processing (B. Tech All Branches) 13-ES205Document2 paginiKL University, Vaddeswaram, Dept. of ECE, Signal Processing (B. Tech All Branches) 13-ES205GowthamÎncă nu există evaluări
- EC2314Document3 paginiEC2314Rakesh Kumar DÎncă nu există evaluări
- Unit Roots: A Selected Survey: Gabriel RodríguezDocument34 paginiUnit Roots: A Selected Survey: Gabriel RodríguezEysson Asca GamarraÎncă nu există evaluări
- Properties of The Ternary Cubic Equation 5x2-3y2 z3Document6 paginiProperties of The Ternary Cubic Equation 5x2-3y2 z3IJRASETPublicationsÎncă nu există evaluări
- Question Paper Code:: Reg. No.Document3 paginiQuestion Paper Code:: Reg. No.DhariniJeevanandamÎncă nu există evaluări
- Computer Graphics Final-1Document32 paginiComputer Graphics Final-1Semakula CalvinÎncă nu există evaluări
- Computer Processing of Remotely-Sensed Images: An IntroductionDe la EverandComputer Processing of Remotely-Sensed Images: An IntroductionÎncă nu există evaluări
- PanelDocument3 paginiPanelPavan KishoreÎncă nu există evaluări
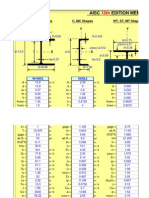
- AISC 13.0 Properties ViewerDocument18 paginiAISC 13.0 Properties ViewerramilianÎncă nu există evaluări
- FXH FX Def FX H: DerivadasDocument2 paginiFXH FX Def FX H: DerivadasIvan ThelonelyÎncă nu există evaluări
- BesintDocument341 paginiBesintSantiago Del Rio OliveiraÎncă nu există evaluări
- PART A (10 X 2 20 Marks)Document5 paginiPART A (10 X 2 20 Marks)dhakaruÎncă nu există evaluări
- Maths C Semester 1 Tutorial Book PDFDocument244 paginiMaths C Semester 1 Tutorial Book PDFDefi ChRistiani TÎncă nu există evaluări
- EE337 Digital Signal Processing Nov Dec 20O6Document3 paginiEE337 Digital Signal Processing Nov Dec 20O6sateesh83Încă nu există evaluări
- Analytical Prediction of Interrupted Cutting Periodic Motions in A Machine ToolDocument12 paginiAnalytical Prediction of Interrupted Cutting Periodic Motions in A Machine Tooltina1augmentosÎncă nu există evaluări
- 3D FrameDocument10 pagini3D FrameZoe SinÎncă nu există evaluări
- MIT6 003F11 S10final SolDocument13 paginiMIT6 003F11 S10final SolabdullahÎncă nu există evaluări
- A Parameter Study of A Machine Tool With Multiple BoundariesDocument18 paginiA Parameter Study of A Machine Tool With Multiple Boundariestina1augmentosÎncă nu există evaluări
- A Simple and Fast Contour Plotting Algorithm For L PDFDocument7 paginiA Simple and Fast Contour Plotting Algorithm For L PDFwijayanataÎncă nu există evaluări
- On The Ternary Quadratic Diophantine EquationDocument6 paginiOn The Ternary Quadratic Diophantine EquationIJRASETPublicationsÎncă nu există evaluări
- Turunan Rumus Buku JacksonDocument11 paginiTurunan Rumus Buku JacksonlennyÎncă nu există evaluări
- Tabela de Integrais Das Funções de BesselDocument422 paginiTabela de Integrais Das Funções de BesseleupasseiÎncă nu există evaluări
- 4500ICBTEGDocument9 pagini4500ICBTEGKalana wickramanayakaÎncă nu există evaluări
- BesintDocument291 paginiBesintkrshiladityaÎncă nu există evaluări
- Baumgardner Frederickson 1985Document10 paginiBaumgardner Frederickson 1985Danilo AlexandreÎncă nu există evaluări
- Characteristics of Fuzzy Petersen Graph and Platonic Graph With Fuzzy RuleDocument7 paginiCharacteristics of Fuzzy Petersen Graph and Platonic Graph With Fuzzy RuleIJRASETPublicationsÎncă nu există evaluări
- 05 06071301 Gong ZDocument12 pagini05 06071301 Gong ZSandip MaityÎncă nu există evaluări
- Image Compression Comparison Using Golden Section Transform, Haar Wavelet Transform and Daubechies D4 Wavelet by MatlabDocument29 paginiImage Compression Comparison Using Golden Section Transform, Haar Wavelet Transform and Daubechies D4 Wavelet by Matlabjasonli1880Încă nu există evaluări
- DSP Model QuestionDocument4 paginiDSP Model QuestionSomnath KhamaruÎncă nu există evaluări
- Analytical and Numerical Modal Analysis of An Automobile Rear Torsion Beam SuspensionDocument13 paginiAnalytical and Numerical Modal Analysis of An Automobile Rear Torsion Beam SuspensionMarco DanielÎncă nu există evaluări
- DSP Objective Type QuestionsDocument15 paginiDSP Objective Type QuestionsAdnan Zahid67% (3)
- CH 03Document28 paginiCH 03Saied Aly SalamahÎncă nu există evaluări
- BesintDocument244 paginiBesintQwaAlmanlawiÎncă nu există evaluări
- A Modified Grey Forecasting Model For Long-Term PredictionDocument8 paginiA Modified Grey Forecasting Model For Long-Term PredictionsvarogusÎncă nu există evaluări
- Target: Jee (Advanced) 2018 NO. 8: DPP Syllabus: Straight Line & Circle AnswerkeyDocument22 paginiTarget: Jee (Advanced) 2018 NO. 8: DPP Syllabus: Straight Line & Circle AnswerkeyCharlie PuthÎncă nu există evaluări
- R RRRR: STA 4702/5701 - Exam 3 Practice ProblemsDocument5 paginiR RRRR: STA 4702/5701 - Exam 3 Practice Problemsبا قرÎncă nu există evaluări
- FE Exam Review - Mathematics - Example ProblemsDocument9 paginiFE Exam Review - Mathematics - Example Problemsumoja87Încă nu există evaluări
- Integral Solutions of The Ternary Cubic EquationDocument4 paginiIntegral Solutions of The Ternary Cubic EquationesatjournalsÎncă nu există evaluări
- Adaptive Filtering For Medical Image Based On 3-Order Tensor FieldDocument4 paginiAdaptive Filtering For Medical Image Based On 3-Order Tensor FieldmiusayÎncă nu există evaluări
- Improvement in Estimating Population Mean Using Two Auxiliary Variables in Two-Phase SamplingDocument8 paginiImprovement in Estimating Population Mean Using Two Auxiliary Variables in Two-Phase SamplingIlieCraciunÎncă nu există evaluări
- EC8352 - Signals & SystemsDocument3 paginiEC8352 - Signals & Systemssyed1188Încă nu există evaluări
- Calculus Ab Review Integrals Area and FTCDocument4 paginiCalculus Ab Review Integrals Area and FTCrogchen666Încă nu există evaluări
- VGT Journal 2.Document11 paginiVGT Journal 2.Suresh NediyaraÎncă nu există evaluări
- Dyadic Curvelet Transform (Dclet) For Image Noise ReductionDocument2 paginiDyadic Curvelet Transform (Dclet) For Image Noise ReductionOmer Aziz MadniÎncă nu există evaluări
- Seventh Semester B. Tech. Degree Examination: (Answer All Questions: 5 X 2 Marks 10 Marks)Document2 paginiSeventh Semester B. Tech. Degree Examination: (Answer All Questions: 5 X 2 Marks 10 Marks)Gīřïşh McÎncă nu există evaluări
- ErrataDocument1 paginăErrataMarco Alonzo Rodriguez MallquiÎncă nu există evaluări
- AP Calc Exam2Document25 paginiAP Calc Exam2Jordan Miles100% (1)
- 2005 Vcnls EPJBDocument4 pagini2005 Vcnls EPJBhogakoxÎncă nu există evaluări
- Fall 2007 Math 151 Common Exam 3B Tue, 27/nov/2007: InstructionsDocument10 paginiFall 2007 Math 151 Common Exam 3B Tue, 27/nov/2007: Instructionskaus9199Încă nu există evaluări
- 2 4 Chlorobenzamido Acetic AcidDocument9 pagini2 4 Chlorobenzamido Acetic AcidGi_85Încă nu există evaluări
- DSD 2-1Document2 paginiDSD 2-1Narendra YenagandulaÎncă nu există evaluări
- WS3 Scientific NotationDocument3 paginiWS3 Scientific NotationAngel ZetinaÎncă nu există evaluări
- Question Paper Code:: Reg. No.Document3 paginiQuestion Paper Code:: Reg. No.DhariniJeevanandamÎncă nu există evaluări
- Semiconductor Physics IDocument82 paginiSemiconductor Physics ISubash PanthiÎncă nu există evaluări
- Computed Tomography Image Reconstruction in 3D VoxelSpaceDocument8 paginiComputed Tomography Image Reconstruction in 3D VoxelSpaceIjmret JournalÎncă nu există evaluări
- cs3110 sp11 Prelim 2 SolutionsDocument8 paginics3110 sp11 Prelim 2 SolutionsLee GaoÎncă nu există evaluări
- Computational Aspects of Maximum Likelihood Estimation of Autoregressive Fractionally Integratedmoving Average ModelsDocument16 paginiComputational Aspects of Maximum Likelihood Estimation of Autoregressive Fractionally Integratedmoving Average ModelsSuci Schima WulandariÎncă nu există evaluări
- The Biostatistics of Aging: From Gompertzian Mortality to an Index of Aging-RelatednessDe la EverandThe Biostatistics of Aging: From Gompertzian Mortality to an Index of Aging-RelatednessÎncă nu există evaluări
- Mandat 040310062548 21Document379 paginiMandat 040310062548 21Sujeet BiradarÎncă nu există evaluări
- Microhydro DirectoryDocument4 paginiMicrohydro Directoryrabei romulusÎncă nu există evaluări
- AVR Interrupt Programming in Assembly and CDocument38 paginiAVR Interrupt Programming in Assembly and CK142526 AlishanÎncă nu există evaluări
- Copy Move Forgery Based On DWT-DCTDocument4 paginiCopy Move Forgery Based On DWT-DCTShiva KeeÎncă nu există evaluări
- LMS 07.1 - LMS 16.1: Technical Data Anti-Backdrive DeviceDocument2 paginiLMS 07.1 - LMS 16.1: Technical Data Anti-Backdrive DeviceTrong Hung NguyenÎncă nu există evaluări
- DualityDocument27 paginiDualitySuprabhat TiwariÎncă nu există evaluări
- Programmable Safety Systems PSS-Range: Service Tool PSS SW QLD, From Version 4.2 Operating Manual Item No. 19 461Document18 paginiProgrammable Safety Systems PSS-Range: Service Tool PSS SW QLD, From Version 4.2 Operating Manual Item No. 19 461MAICK_ITSÎncă nu există evaluări
- Uses of The Components of Crude Oil As FuelsDocument6 paginiUses of The Components of Crude Oil As FuelsPearl LawrenceÎncă nu există evaluări
- Lab Manual 11 Infrared SpectrosDocument5 paginiLab Manual 11 Infrared SpectrosLuca Selva CampobassoÎncă nu există evaluări
- Electric Power Station PDFDocument344 paginiElectric Power Station PDFMukesh KumarÎncă nu există evaluări
- Fasteners Lecture 11-20-03Document67 paginiFasteners Lecture 11-20-03laponggaÎncă nu există evaluări
- MMD 74 XX DR PS 0020 - C03Document1 paginăMMD 74 XX DR PS 0020 - C03bramexÎncă nu există evaluări
- SuperOhm 3754 (3748-11) - Technical Data Sheet - ECC - Rev 2 - 2016-09Document2 paginiSuperOhm 3754 (3748-11) - Technical Data Sheet - ECC - Rev 2 - 2016-09igor brocaÎncă nu există evaluări
- 9-Energy Resources Properties of Steam PDFDocument67 pagini9-Energy Resources Properties of Steam PDFS.m. ChandrashekarÎncă nu există evaluări
- cjv30 Maintenance V10a PDFDocument101 paginicjv30 Maintenance V10a PDFEdu100% (1)
- (Ebook - Electronics) - Principles of PLL - Tutorial (Kroupa 2000)Document66 pagini(Ebook - Electronics) - Principles of PLL - Tutorial (Kroupa 2000)양종렬Încă nu există evaluări
- SunstarDocument189 paginiSunstarSarvesh Chandra SaxenaÎncă nu există evaluări
- Stainless Steel: Presented By, Dr. Pragati Jain 1 YearDocument68 paginiStainless Steel: Presented By, Dr. Pragati Jain 1 YearSneha JoshiÎncă nu există evaluări
- Activation and Deactivation of CatalystsDocument16 paginiActivation and Deactivation of Catalystsshan0214Încă nu există evaluări
- Experiment SCDocument5 paginiExperiment SCnitinmgÎncă nu există evaluări
- Ism Practical FileDocument62 paginiIsm Practical FilePriya AgrawalÎncă nu există evaluări
- 400017A C65 Users Manual V5XXDocument61 pagini400017A C65 Users Manual V5XXwhusada100% (1)
- Knowledge Area Quiz-Project Integration ManagementDocument4 paginiKnowledge Area Quiz-Project Integration Managementcrown212Încă nu există evaluări
- Green Line TransformerDocument4 paginiGreen Line TransformerwakasÎncă nu există evaluări
- Language Processing System:-: CompilerDocument6 paginiLanguage Processing System:-: CompilerRenganathan rameshÎncă nu există evaluări
- 1450 01 Air Hoists and Trolleys Atlas CopcoDocument12 pagini1450 01 Air Hoists and Trolleys Atlas Copcomohammed shammiÎncă nu există evaluări
- TurkSim - Aviation Decoders, Calculators, ToolsDocument8 paginiTurkSim - Aviation Decoders, Calculators, ToolsAmparo AlvarezÎncă nu există evaluări
- Cinegy User ManualDocument253 paginiCinegy User ManualNizamuddin KaziÎncă nu există evaluări
- Book - Adams Tutorial Ex17 W PDFDocument121 paginiBook - Adams Tutorial Ex17 W PDFKamran ShahidÎncă nu există evaluări
- Testing Report For Pressure Relief Valves: Petrofac International (UAE) LLCDocument1 paginăTesting Report For Pressure Relief Valves: Petrofac International (UAE) LLCmurthy challapalliÎncă nu există evaluări