S-ar putea să vă placă și
- Drug Diffusion Rates in Membrane vs Monolithic SystemsDocument7 paginiDrug Diffusion Rates in Membrane vs Monolithic Systemszubin33333Încă nu există evaluări
- Principles of TurbomachineryDocument276 paginiPrinciples of TurbomachineryNavneet PAndeÎncă nu există evaluări
- Mathematical Modeling of Systems: TextbookDocument3 paginiMathematical Modeling of Systems: TextbookramÎncă nu există evaluări
- Me 2401 Mechatronics: Unit Iii System Models and ControllersDocument46 paginiMe 2401 Mechatronics: Unit Iii System Models and ControllersPANNERSELVAM50% (2)
- Lecture 4 NotesDocument36 paginiLecture 4 Notesahmed11 engyemenÎncă nu există evaluări
- Of Freedom. For Example A Simple Pendulum Consisting of An Inextensible String That IsDocument37 paginiOf Freedom. For Example A Simple Pendulum Consisting of An Inextensible String That IsLucia Antonius100% (1)
- Vibration Dynamics PDFDocument41 paginiVibration Dynamics PDFvbhvmht09Încă nu există evaluări
- Types of Response and VibrationsDocument40 paginiTypes of Response and VibrationsGaluh Ayu PÎncă nu există evaluări
- Motion and Dynamics: 3.1 Making Sense of Dynamic EquilibriumDocument6 paginiMotion and Dynamics: 3.1 Making Sense of Dynamic EquilibriumnasirfahimÎncă nu există evaluări
- Chapter-Ii Introduction To ModellingDocument50 paginiChapter-Ii Introduction To ModellingAHMEDÎncă nu există evaluări
- Dynamics 1Document12 paginiDynamics 1nicholasomodingÎncă nu există evaluări
- Dynamic Force Analysis & Vibration in Machines Workshop at KauveryDocument132 paginiDynamic Force Analysis & Vibration in Machines Workshop at KauveryMoorthy GovindarajÎncă nu există evaluări
- Summary of Topic Covered in ECE408Document89 paginiSummary of Topic Covered in ECE408Nishikata ManipolÎncă nu există evaluări
- Lecture 2 Transfer FunctionDocument12 paginiLecture 2 Transfer FunctionSyed Hussain Akbar MosviÎncă nu există evaluări
- H. Zhang Et Al - The Effect of Mechanical Deformation On Spiral TurbulenceDocument7 paginiH. Zhang Et Al - The Effect of Mechanical Deformation On Spiral TurbulenceGretymjÎncă nu există evaluări
- ANSYS Static & Dynamic Analysis in <40 CharsDocument5 paginiANSYS Static & Dynamic Analysis in <40 CharstarasasankaÎncă nu există evaluări
- Chapter 5Document73 paginiChapter 5Niket GuptaÎncă nu există evaluări
- ME 304 Control Systems ExercisesDocument58 paginiME 304 Control Systems ExercisesmjdaleneziÎncă nu există evaluări
- Torsional Vibration of a Turbine-Generator Shaft During Electrical DisturbancesDocument12 paginiTorsional Vibration of a Turbine-Generator Shaft During Electrical DisturbancesfabrcadÎncă nu există evaluări
- Week 1 Vibration IntroductionDocument22 paginiWeek 1 Vibration IntroductionSaya SantornoÎncă nu există evaluări
- Structural Dynamics and Earthquake EngineeringDocument76 paginiStructural Dynamics and Earthquake EngineeringGerman ToledoÎncă nu există evaluări
- Advanced Thermal and Fluid Engineering: (Company Name) (Company Address)Document14 paginiAdvanced Thermal and Fluid Engineering: (Company Name) (Company Address)Nidhin KakkanattuÎncă nu există evaluări
- Introduction to Single Degree of Freedom SystemsDocument99 paginiIntroduction to Single Degree of Freedom SystemsJura PateregaÎncă nu există evaluări
- Modeling of Dynamic SystemsmesinDocument19 paginiModeling of Dynamic SystemsmesinRifqi Bustanul FaozanÎncă nu există evaluări
- Fundamentals of Vibration ExplainedDocument102 paginiFundamentals of Vibration ExplainedKoteswara RaoÎncă nu există evaluări
- NPTEL - Mechanical Engineering - Vibration ControlDocument10 paginiNPTEL - Mechanical Engineering - Vibration Control8104772799Încă nu există evaluări
- Basic Elements of Control System: 1. Open-Loop SystemsDocument58 paginiBasic Elements of Control System: 1. Open-Loop SystemssrinivasanÎncă nu există evaluări
- On The Concept of Negative Damping: Workshop On "Mathematical Challenges and Modelling of Hydro Elasticity"Document24 paginiOn The Concept of Negative Damping: Workshop On "Mathematical Challenges and Modelling of Hydro Elasticity"Anonymous xcFcOgMiÎncă nu există evaluări
- Basics of Vibration DynamicsDocument41 paginiBasics of Vibration DynamicsPrashanth Babu.KÎncă nu există evaluări
- Torsional Vibration Analysis of Turbine-Generator ShaftDocument12 paginiTorsional Vibration Analysis of Turbine-Generator ShaftNguyen Danh TuyenÎncă nu există evaluări
- Dynamic SystemDocument28 paginiDynamic SystemA - STARÎncă nu există evaluări
- Lecture 2 and 3Document13 paginiLecture 2 and 3Abel OmweriÎncă nu există evaluări
- Dynamic Systems Lab ReportDocument42 paginiDynamic Systems Lab ReportSachee Perera100% (6)
- Experiment - 2a: First Order DynamicsDocument9 paginiExperiment - 2a: First Order DynamicsSisay AmareÎncă nu există evaluări
- Chapt 3 FrenchDocument61 paginiChapt 3 FrenchSaurabh BorseÎncă nu există evaluări
- Transfer Functions and Block Diagrams PDFDocument21 paginiTransfer Functions and Block Diagrams PDFJuliana NepembeÎncă nu există evaluări
- Vibration Analysis of Structures and SystemsDocument6 paginiVibration Analysis of Structures and SystemsmostafaÎncă nu există evaluări
- ZFGHFGHFGDocument6 paginiZFGHFGHFGAhmad Firdaus Zawawil AnwarÎncă nu există evaluări
- IC6501 CONTROL SYSTEMSDocument67 paginiIC6501 CONTROL SYSTEMSK.Sushita VISTASÎncă nu există evaluări
- Wave and OscillationDocument63 paginiWave and OscillationAbhishek SinghÎncă nu există evaluări
- CH 2Document95 paginiCH 2유지상Încă nu există evaluări
- Torsional Vibration RotorDocument59 paginiTorsional Vibration Rotordaongocha108100% (1)
- Mathematical ModelsDocument69 paginiMathematical Modelskyaw phone htetÎncă nu există evaluări
- PHYS 102 Questions on dimensional analysis 2024_014114Document7 paginiPHYS 102 Questions on dimensional analysis 2024_014114mavrickgsniusÎncă nu există evaluări
- Ch. 2Document6 paginiCh. 2Sandy ShohdyÎncă nu există evaluări
- July 28 - Introduction To Structural Dynamics Dr. HW Huang PDFDocument52 paginiJuly 28 - Introduction To Structural Dynamics Dr. HW Huang PDFurvishÎncă nu există evaluări
- Damped VibratorDocument2 paginiDamped VibratorBhakti MahbubaniÎncă nu există evaluări
- Principle of Linear Impulse and Momentum (Section 15.1) Today's ObjectivesDocument19 paginiPrinciple of Linear Impulse and Momentum (Section 15.1) Today's ObjectivesgÎncă nu există evaluări
- Mems ActuatorDocument10 paginiMems ActuatorRohith RajÎncă nu există evaluări
- Equations of MotionDocument6 paginiEquations of MotionDharshan KofiÎncă nu există evaluări
- Simple Harmonic Motion: Is SHM Sinusoidal Wave ?Document5 paginiSimple Harmonic Motion: Is SHM Sinusoidal Wave ?ضياء بن احمد الكباريÎncă nu există evaluări
- SDC 2010/11 - General Power System Dynamic Modeling – 1st groupDocument16 paginiSDC 2010/11 - General Power System Dynamic Modeling – 1st groupPaulo RijoÎncă nu există evaluări
- Lecture 3 System ModelingDocument16 paginiLecture 3 System Modelinganon_412646200Încă nu există evaluări
- Linear Momentum & Impulse ConservationDocument17 paginiLinear Momentum & Impulse ConservationChrise RajÎncă nu există evaluări
- Linear Impulse and Momentum PrinciplesDocument17 paginiLinear Impulse and Momentum PrinciplesVinot EsanÎncă nu există evaluări
- Optimization of Mass and Stiffness Distribution For Efficient Bipedal WalkingDocument6 paginiOptimization of Mass and Stiffness Distribution For Efficient Bipedal WalkingDaniel Sanz MerodioÎncă nu există evaluări
- Structural DynamicsDocument99 paginiStructural DynamicsUtb Bjp100% (10)
- A Complete Course in Physics (Graphs) - First EditionDe la EverandA Complete Course in Physics (Graphs) - First EditionÎncă nu există evaluări
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresDe la EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresEvaluare: 4 din 5 stele4/5 (1)
- O level Physics Questions And Answer Practice Papers 2De la EverandO level Physics Questions And Answer Practice Papers 2Evaluare: 5 din 5 stele5/5 (1)
- Manual Transmission - 2Document6 paginiManual Transmission - 2Gthulasi78Încă nu există evaluări
- Manual Transmission - 1Document6 paginiManual Transmission - 1Gthulasi78Încă nu există evaluări
- BLDC 5Document7 paginiBLDC 5Gthulasi78Încă nu există evaluări
- BLDC 3Document4 paginiBLDC 3Gthulasi78Încă nu există evaluări
- Weibull Tutorial 2Document6 paginiWeibull Tutorial 2Gthulasi78Încă nu există evaluări
- Brushless DC Motors Are A Type of Synchronous MotorDocument5 paginiBrushless DC Motors Are A Type of Synchronous MotorGthulasi78Încă nu există evaluări
- Weibull Tutorial 1Document5 paginiWeibull Tutorial 1Gthulasi78Încă nu există evaluări
- Engine Dynamic Properties-2Document5 paginiEngine Dynamic Properties-2Gthulasi78Încă nu există evaluări
- Engine Dynamic Properties-1Document5 paginiEngine Dynamic Properties-1Gthulasi78Încă nu există evaluări
- The Steady State Magnetic FieldDocument28 paginiThe Steady State Magnetic FieldRashmi HarishÎncă nu există evaluări
- BLDC 4Document5 paginiBLDC 4Gthulasi78Încă nu există evaluări
- BLDC 3Document4 paginiBLDC 3Gthulasi78Încă nu există evaluări
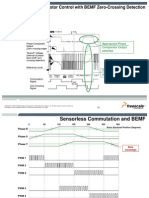
- Sensorless BLDC Motor Control With BEMF Zero-Crossing DetectionDocument6 paginiSensorless BLDC Motor Control With BEMF Zero-Crossing DetectionGthulasi78Încă nu există evaluări
- BLDC 2Document4 paginiBLDC 2Gthulasi78Încă nu există evaluări
- SensorlessBLDCControl 2Document7 paginiSensorlessBLDCControl 2Gthulasi78Încă nu există evaluări
- SensorlessBLDCControl 2Document7 paginiSensorlessBLDCControl 2Gthulasi78Încă nu există evaluări
- 3-Phase Sensorless BLDC Motor Control Using MC9S08MP16: PresentationDocument7 pagini3-Phase Sensorless BLDC Motor Control Using MC9S08MP16: PresentationGthulasi78Încă nu există evaluări
- Synchronous PM Motors: Stator Field Needs To Be Close To Orthogonal (90°) To Rotor Field To GetDocument4 paginiSynchronous PM Motors: Stator Field Needs To Be Close To Orthogonal (90°) To Rotor Field To GetGthulasi78Încă nu există evaluări
- BLDC 3Document4 paginiBLDC 3Gthulasi78Încă nu există evaluări
- BLDC 2Document4 paginiBLDC 2Gthulasi78Încă nu există evaluări
- ECE 753 Fault Tolerant Computing Reliability ModelingDocument6 paginiECE 753 Fault Tolerant Computing Reliability ModelingGthulasi78Încă nu există evaluări
- Brushless DC Motors Are A Type of Synchronous MotorDocument5 paginiBrushless DC Motors Are A Type of Synchronous MotorGthulasi78Încă nu există evaluări
- Engine Dynamic Properties - 5Document5 paginiEngine Dynamic Properties - 5Gthulasi78Încă nu există evaluări
- Rotor Sectional View and Commutation SequenceDocument5 paginiRotor Sectional View and Commutation SequenceGthulasi78Încă nu există evaluări
- V6 Engine Dynamic PropertiesDocument3 paginiV6 Engine Dynamic PropertiesGthulasi78Încă nu există evaluări
- Engine Dynamic Properties - 2Document5 paginiEngine Dynamic Properties - 2Gthulasi78Încă nu există evaluări
- Brushless DC Motors Are A Type of Synchronous MotorDocument5 paginiBrushless DC Motors Are A Type of Synchronous MotorGthulasi78Încă nu există evaluări
- Engine Dynamic Properties - 6Document5 paginiEngine Dynamic Properties - 6Gthulasi78Încă nu există evaluări
- Engine Dynamic Properties - 4Document5 paginiEngine Dynamic Properties - 4Gthulasi78Încă nu există evaluări
- Engine Dynamic Properties - 3Document5 paginiEngine Dynamic Properties - 3Gthulasi78Încă nu există evaluări
- Antennas PropagationDocument1 paginăAntennas Propagationzoe gypsyÎncă nu există evaluări
- Antenna Ass 1Document19 paginiAntenna Ass 1Yonas D. EbrenÎncă nu există evaluări
- Inverse Problem For A Space-Time Generalized Diffusion EquationDocument12 paginiInverse Problem For A Space-Time Generalized Diffusion EquationkamranÎncă nu există evaluări
- Recent Developments in The Theory of Polar Continua, by Rastko StojanovicDocument344 paginiRecent Developments in The Theory of Polar Continua, by Rastko StojanovicBodan NedÎncă nu există evaluări
- Css Applied Mathematics 1 2009Document2 paginiCss Applied Mathematics 1 2009Bakhita MaryamÎncă nu există evaluări
- Numerical in Electrical, Mechanical, Electronic, Optical Materials From Different Books Along With Previous Year Papers of GATE, ES, CS and Other Exams.Document24 paginiNumerical in Electrical, Mechanical, Electronic, Optical Materials From Different Books Along With Previous Year Papers of GATE, ES, CS and Other Exams.Rehan Sharma100% (1)
- AP Workbook 4-G-2Document3 paginiAP Workbook 4-G-2Steve PeraltaÎncă nu există evaluări
- Substation Online Partial Discharge Testing (OLPD) Testing Tech. Update and InfoDocument11 paginiSubstation Online Partial Discharge Testing (OLPD) Testing Tech. Update and InfoTrebor SantosÎncă nu există evaluări
- Quantum Entanglement LectureDocument4 paginiQuantum Entanglement LectureBasman BasmanÎncă nu există evaluări
- FEA Lab Manual for SV College of EngineeringDocument139 paginiFEA Lab Manual for SV College of Engineeringडॉ. कनिष्क शर्माÎncă nu există evaluări
- BEAM ANALYSIS USING THE STIFFNESS METHOD IN MATLABDocument14 paginiBEAM ANALYSIS USING THE STIFFNESS METHOD IN MATLABUpadesh Shrestha100% (3)
- Chap 3.3 Physics of Semiconductors: PhononDocument9 paginiChap 3.3 Physics of Semiconductors: PhononHassan AzouzÎncă nu există evaluări
- Numerical Modeling of Physical Process of Far Field Underwater ExplosionsDocument11 paginiNumerical Modeling of Physical Process of Far Field Underwater ExplosionsKristjan TabriÎncă nu există evaluări
- Chapter-4 - Moving Charges and MagnetismDocument8 paginiChapter-4 - Moving Charges and MagnetismAdarsh SilkotiÎncă nu există evaluări
- Mechanics 3 Revision NotesDocument45 paginiMechanics 3 Revision NotesDexter FungÎncă nu există evaluări
- 2 - Ec3 1 8Document5 pagini2 - Ec3 1 8dmardetkÎncă nu există evaluări
- MATLAB Solution To Microwave Engineering Pozar 4th Ed. Example 1.5Document5 paginiMATLAB Solution To Microwave Engineering Pozar 4th Ed. Example 1.5John Bofarull GuixÎncă nu există evaluări
- Ebbing 12Document20 paginiEbbing 12Ra MilÎncă nu există evaluări
- Learning What Makes Things MoveDocument7 paginiLearning What Makes Things MoveAnubhuti GhaiÎncă nu există evaluări
- AISC-LRFD93 Untuk Perencanaan Stuktur Baja Dengan SAP2000Document30 paginiAISC-LRFD93 Untuk Perencanaan Stuktur Baja Dengan SAP2000irbar.darmansyah.alwi100% (2)
- Region Vii - Central Visayas Schools Division of Cebu Province S. Y. 2020-2021Document7 paginiRegion Vii - Central Visayas Schools Division of Cebu Province S. Y. 2020-2021Christian Jay R. LanuriasÎncă nu există evaluări
- MicromagnetsDocument5 paginiMicromagnetsTa BarÎncă nu există evaluări
- AP 2012 Physics B Free Response QuestionsDocument12 paginiAP 2012 Physics B Free Response QuestionsAlan G.Încă nu există evaluări
- 8 Polyflow - 12.1 Rheology PDFDocument23 pagini8 Polyflow - 12.1 Rheology PDFwoongs73Încă nu există evaluări
- Types of chemical bonds and Lewis structuresDocument32 paginiTypes of chemical bonds and Lewis structuresUmer Iftikhar AhmedÎncă nu există evaluări
- Shielding of Power CablesDocument4 paginiShielding of Power Cablespmaniamp100% (1)
- Dimensional Stone Cutting With Water Jet. Surface FinishingDocument7 paginiDimensional Stone Cutting With Water Jet. Surface FinishingGuillermo Ruperto Martín CortésÎncă nu există evaluări
- Induced by Electron Motion : CurrentsDocument2 paginiInduced by Electron Motion : CurrentsJààd BenserhîrÎncă nu există evaluări