S-ar putea să vă placă și
- HHT Alpha MethodDocument22 paginiHHT Alpha MethodSasi Sudhahar ChinnasamyÎncă nu există evaluări
- Stability of Gepp and GecpDocument3 paginiStability of Gepp and Gecpgovawls89Încă nu există evaluări
- Discret HamzaouiDocument19 paginiDiscret HamzaouiPRED ROOMÎncă nu există evaluări
- KMEM4214 Applied Vibration ALsDocument16 paginiKMEM4214 Applied Vibration ALsdanish91Încă nu există evaluări
- Observer Hybrid Systems 4Document12 paginiObserver Hybrid Systems 4Paulina MarquezÎncă nu există evaluări
- On Integral Control in Backstepping: Analysis of Different TechniquesDocument6 paginiOn Integral Control in Backstepping: Analysis of Different TechniqueslimakmÎncă nu există evaluări
- Complete Quadratic Lyapunov Functionals Using Bessel LegendreInequalityDocument6 paginiComplete Quadratic Lyapunov Functionals Using Bessel LegendreInequalityVictor Manuel López MazariegosÎncă nu există evaluări
- Quiz 3 SolutionsDocument5 paginiQuiz 3 Solutionsyashar250075% (4)
- BIEN462 A1Document4 paginiBIEN462 A1Eileen FuÎncă nu există evaluări
- Randomized Algorithms For 3-SatDocument16 paginiRandomized Algorithms For 3-SatSari BarhumÎncă nu există evaluări
- Ex - Sloution CompendiumDocument115 paginiEx - Sloution CompendiumAli Jaber Al QattanÎncă nu există evaluări
- Labview GuideDocument8 paginiLabview GuideRameezÎncă nu există evaluări
- EE132 Lab1 OL Vs CLDocument3 paginiEE132 Lab1 OL Vs CLthinkberry22Încă nu există evaluări
- On The Stabilization and Stability Robustness Against Small Delays of Some Damped Wave EquationsDocument5 paginiOn The Stabilization and Stability Robustness Against Small Delays of Some Damped Wave EquationsInst Robert Díaz RiemannÎncă nu există evaluări
- Part IB Paper 6: Information Engineering Linear Systems and Control Glenn VinnicombeDocument18 paginiPart IB Paper 6: Information Engineering Linear Systems and Control Glenn Vinnicombeaali1915Încă nu există evaluări
- Ee 5307 HomeworksDocument15 paginiEe 5307 HomeworksManoj KumarÎncă nu există evaluări
- MIT14 384F13 Lec1 PDFDocument6 paginiMIT14 384F13 Lec1 PDFwerwerwerÎncă nu există evaluări
- WP 95 015Document21 paginiWP 95 015Carlos Eduardo Morales MayhuayÎncă nu există evaluări
- 423e PDFDocument24 pagini423e PDFismael saadatÎncă nu există evaluări
- Exercises in Nonlinear Control SystemsDocument115 paginiExercises in Nonlinear Control SystemsAshk Nori ZadehÎncă nu există evaluări
- Solving Linear Unbranched Pathways With Michaelis-Menten Kinetics Using The Lambert W-FunctionDocument19 paginiSolving Linear Unbranched Pathways With Michaelis-Menten Kinetics Using The Lambert W-FunctionDeep GhoseÎncă nu există evaluări
- Stabilization of Nonlinear Time-Varying Systems: A Control Lyapunov Function ApproachDocument14 paginiStabilization of Nonlinear Time-Varying Systems: A Control Lyapunov Function Approachaydın demirelÎncă nu există evaluări
- Systems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversDocument6 paginiSystems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversColinSimÎncă nu există evaluări
- Lec02 2012eightDocument5 paginiLec02 2012eightPhạm Ngọc HòaÎncă nu există evaluări
- The Physical Meaning of Replica Symmetry BreakingDocument15 paginiThe Physical Meaning of Replica Symmetry BreakingpasomagaÎncă nu există evaluări
- The Behavior of Dynamic Systems: 1.0 Where Are We in The Course?Document15 paginiThe Behavior of Dynamic Systems: 1.0 Where Are We in The Course?Mariaa Angeles StewartÎncă nu există evaluări
- Exercises in Nonlinear Control SystemsDocument99 paginiExercises in Nonlinear Control SystemsRiccardo M.G. Ferrari100% (2)
- Lecture Notes Stochastic Optimization-KooleDocument42 paginiLecture Notes Stochastic Optimization-Koolenstl0101Încă nu există evaluări
- Hasbun PosterDocument21 paginiHasbun PosterSuhailUmarÎncă nu există evaluări
- Classical Least Squares TheoryDocument38 paginiClassical Least Squares TheoryRyan TagaÎncă nu există evaluări
- HocsDocument5 paginiHocsyygorakindyyÎncă nu există evaluări
- Other ApplicationsDocument78 paginiOther Applications叶远虑Încă nu există evaluări
- Open Loop Closed LoopDocument12 paginiOpen Loop Closed LoopKarthik RamÎncă nu există evaluări
- Non-Classical Operational Calculus Applied To Certain Linear Discrete Time-SystemDocument7 paginiNon-Classical Operational Calculus Applied To Certain Linear Discrete Time-Systemsaleemnasir2k7154Încă nu există evaluări
- Difference Equations in Normed Spaces: Stability and OscillationsDe la EverandDifference Equations in Normed Spaces: Stability and OscillationsÎncă nu există evaluări
- Physics430 Lecture15Document16 paginiPhysics430 Lecture15Onimash RajuÎncă nu există evaluări
- ECOM031 Financial Econometrics Lecture 9: Markov Switching Models and Artificial Neural Network ModelsDocument6 paginiECOM031 Financial Econometrics Lecture 9: Markov Switching Models and Artificial Neural Network ModelsBelindennoluÎncă nu există evaluări
- Local Stabilization of Linear Systems Under Amplitude and Rate Saturating ActuatorsDocument6 paginiLocal Stabilization of Linear Systems Under Amplitude and Rate Saturating ActuatorshighwattÎncă nu există evaluări
- Applications of Diagonalisation: ReadingDocument19 paginiApplications of Diagonalisation: Readingnepalboy20202192Încă nu există evaluări
- Lab 2Document16 paginiLab 2KINGS entertainment KHANÎncă nu există evaluări
- Lyapunov Stability Analysis of A Mass-Spring System Subject To FrictionDocument27 paginiLyapunov Stability Analysis of A Mass-Spring System Subject To FrictionGrecia GarciaÎncă nu există evaluări
- Nonlinear Control and Servo SystemsDocument74 paginiNonlinear Control and Servo SystemsshivnairÎncă nu există evaluări
- CS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement LearningDocument5 paginiCS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement Learningsuhar adiÎncă nu există evaluări
- TAN Activity2 Section5.1Document16 paginiTAN Activity2 Section5.1ceferinotanÎncă nu există evaluări
- Modern Control Theory and It'S ApplicationsDocument9 paginiModern Control Theory and It'S ApplicationsMohamed ShamseldeinÎncă nu există evaluări
- Robust Positively Invariant Sets - Efficient ComputationDocument6 paginiRobust Positively Invariant Sets - Efficient ComputationFurqanÎncă nu există evaluări
- HwsDocument12 paginiHwsSaiPavanManojDamarajuÎncă nu există evaluări
- Chap 7Document24 paginiChap 7AmmarNikÎncă nu există evaluări
- 263 HomeworkDocument153 pagini263 HomeworkHimanshu Saikia JÎncă nu există evaluări
- Linearization Stability Definitions Simulation in Matlab/SimulinkDocument39 paginiLinearization Stability Definitions Simulation in Matlab/SimulinkSachin ShendeÎncă nu există evaluări
- L05 SimpleOscillationsDocument14 paginiL05 SimpleOscillationsliuzihan32320Încă nu există evaluări
- Pages 16 To 23 (Annotated)Document8 paginiPages 16 To 23 (Annotated)Victor BenedictÎncă nu există evaluări
- Markov Models: 1 DefinitionsDocument10 paginiMarkov Models: 1 DefinitionsraviÎncă nu există evaluări
- State Estimation Using Shifted Legendre Polynomials: B.M.Mohan, Senior Member IEEE Sanjeeb Kumar Kar, Student Member IEEEDocument6 paginiState Estimation Using Shifted Legendre Polynomials: B.M.Mohan, Senior Member IEEE Sanjeeb Kumar Kar, Student Member IEEErodlnf1Încă nu există evaluări
- SLAM of Multi-Robot System Considering Its Network Topology: H. W. Dong, Z. W. LuoDocument2 paginiSLAM of Multi-Robot System Considering Its Network Topology: H. W. Dong, Z. W. LuopaperopenaccessÎncă nu există evaluări
- امثلية4Document8 paginiامثلية4abdoo khallelÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- Elementary Differential Equations with Linear AlgebraDe la EverandElementary Differential Equations with Linear AlgebraÎncă nu există evaluări
- Entry Level Life SkillsLaunch and Support Event - Tuesday 12th September 2017Document39 paginiEntry Level Life SkillsLaunch and Support Event - Tuesday 12th September 2017Ali DurazÎncă nu există evaluări
- Lifeskills and Cce EditedDocument55 paginiLifeskills and Cce EditedAli DurazÎncă nu există evaluări
- Better Money ManagementDocument46 paginiBetter Money ManagementAli DurazÎncă nu există evaluări
- Lesson Two: Living On Your OwnDocument10 paginiLesson Two: Living On Your OwnAli DurazÎncă nu există evaluări
- Lesson Nine: Protecting Your MoneyDocument15 paginiLesson Nine: Protecting Your MoneyAli DurazÎncă nu există evaluări
- Health and Wellness Skills For A Healthy LifeDocument18 paginiHealth and Wellness Skills For A Healthy LifeAli DurazÎncă nu există evaluări
- Chapter 13 - Relationships and Managing Your MoneyDocument23 paginiChapter 13 - Relationships and Managing Your MoneyAli DurazÎncă nu există evaluări
- Game SierisDocument1 paginăGame SierisAli DurazÎncă nu există evaluări
- 12 Weeks Post Graduate Certificate Course in Thermal Power Plant EngineeringDocument5 pagini12 Weeks Post Graduate Certificate Course in Thermal Power Plant EngineeringArun KumarÎncă nu există evaluări
- New Microsoft Word DocumentDocument5 paginiNew Microsoft Word DocumentAli DurazÎncă nu există evaluări
- مهم جداDocument1 paginăمهم جداAli DurazÎncă nu există evaluări
- Global Mobility Innovation BrochureDocument8 paginiGlobal Mobility Innovation BrochureAli DurazÎncă nu există evaluări
- Power Amplifiers: Phase Shift OscillatorDocument3 paginiPower Amplifiers: Phase Shift OscillatorAli DurazÎncă nu există evaluări
- Add4BLDC MotorDocument1 paginăAdd4BLDC MotorAli DurazÎncă nu există evaluări
- Control11 Digital ControlDocument6 paginiControl11 Digital ControlAli DurazÎncă nu există evaluări
- Add 4 Look AheaddvDocument1 paginăAdd 4 Look AheaddvMuhammad Hammad Sabir PansotaÎncă nu există evaluări
- A CLA c3 SymsvDocument1 paginăA CLA c3 SymsvAli DurazÎncă nu există evaluări
- A CLA c2 SymcDocument1 paginăA CLA c2 SymcAli DurazÎncă nu există evaluări
- Induction Motor As Generator-1Document4 paginiInduction Motor As Generator-1regina_sÎncă nu există evaluări
- A CLA c4 SymzDocument1 paginăA CLA c4 SymzAli DurazÎncă nu există evaluări
- A CLA c1 SymdDocument1 paginăA CLA c1 SymdAli DurazÎncă nu există evaluări
- 04-CombExflyweel SXZZDocument43 pagini04-CombExflyweel SXZZAli DurazÎncă nu există evaluări
- CHAP 17 - Linear-Digital ICsDocument30 paginiCHAP 17 - Linear-Digital ICsAli Duraz100% (1)
- Controlfinal Test5Document1 paginăControlfinal Test5Ali DurazÎncă nu există evaluări
- FlywheelDocument45 paginiFlywheelSteven Sullivan100% (1)
- Electro-Mechanical Batteries For Low Earth Orbit Satellite With Hallow Cylinder Flywheel MachineDocument9 paginiElectro-Mechanical Batteries For Low Earth Orbit Satellite With Hallow Cylinder Flywheel MachineAnonymous LSebPSÎncă nu există evaluări
- Design Aspects of A High Speed Permanent Synchronous Motor/ Generator For Flywheel Applications TM-2005-213651Document14 paginiDesign Aspects of A High Speed Permanent Synchronous Motor/ Generator For Flywheel Applications TM-2005-213651Pieter van der MeerÎncă nu există evaluări
- A Selection of Electrical Machine As An Electromechanical Battery For Earth Orbit SatelliteDocument6 paginiA Selection of Electrical Machine As An Electromechanical Battery For Earth Orbit SatelliteAli DurazÎncă nu există evaluări
- Alexander BXS Flyweel SXDocument108 paginiAlexander BXS Flyweel SXAli DurazÎncă nu există evaluări
- 259-Abdi Research PaperDocument4 pagini259-Abdi Research PaperYasir AmmarÎncă nu există evaluări
- List of GHS Hazard Statement & PictogramsDocument33 paginiList of GHS Hazard Statement & PictogramsKhairul BarsriÎncă nu există evaluări
- Lecture 8cDocument29 paginiLecture 8cs_paraisoÎncă nu există evaluări
- Pressure Sensor Air PST Datasheet 51 en 2780071435Document3 paginiPressure Sensor Air PST Datasheet 51 en 2780071435Luis GuevaraÎncă nu există evaluări
- S Energy SN 72 Cell Series Solar Panel Datasheet V 01Document2 paginiS Energy SN 72 Cell Series Solar Panel Datasheet V 01infercomÎncă nu există evaluări
- Edan M3B Vital Signs Monitor User ManualDocument92 paginiEdan M3B Vital Signs Monitor User ManualJosé marino Franco AlzateÎncă nu există evaluări
- Fundamentals Writing Prompts: TechnicalDocument25 paginiFundamentals Writing Prompts: TechnicalFjvhjvgÎncă nu există evaluări
- Index Terms LinksDocument31 paginiIndex Terms Linksdeeptiwagle5649Încă nu există evaluări
- CHM170L Exp3 Surface TensionDocument5 paginiCHM170L Exp3 Surface TensionKaiser SaltoÎncă nu există evaluări
- Chapter 3Document23 paginiChapter 3pganoelÎncă nu există evaluări
- ADA Practical File: Kartik KatariaDocument34 paginiADA Practical File: Kartik KatariaKilari TejaÎncă nu există evaluări
- Pioneer Car Stereo System DVH-735AVDocument85 paginiPioneer Car Stereo System DVH-735AVJs LópezÎncă nu există evaluări
- A Spectrum Analyser For The Radio AmateurDocument24 paginiA Spectrum Analyser For The Radio AmateurRavindra MogheÎncă nu există evaluări
- GS (2006) Vol 2 Rev20 S15 Steel ReinforcementDocument14 paginiGS (2006) Vol 2 Rev20 S15 Steel ReinforcementLap Chun TUNGÎncă nu există evaluări
- LBX 6513DS VTMDocument4 paginiLBX 6513DS VTMsergiocuencascribÎncă nu există evaluări
- Ug CR RPTSTDDocument1.014 paginiUg CR RPTSTDViji BanuÎncă nu există evaluări
- Pipe Clamp For Sway Bracing TOLCODocument1 paginăPipe Clamp For Sway Bracing TOLCOEdwin G Garcia ChÎncă nu există evaluări
- Specializations MTech Software SystemsDocument5 paginiSpecializations MTech Software SystemsAkanksha SinghÎncă nu există evaluări
- CH 1 Optical Fiber Introduction - 2Document18 paginiCH 1 Optical Fiber Introduction - 2Krishna Prasad PheluÎncă nu există evaluări
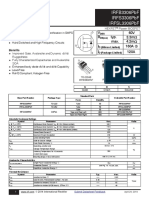
- Irfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADocument12 paginiIrfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADirson Volmir WilligÎncă nu există evaluări
- Implant TrainingDocument5 paginiImplant Trainingrsrinath91Încă nu există evaluări
- Three - Dimensional Viscous Confinement and Cooling of Atoms by Resonance Radiation PressureDocument6 paginiThree - Dimensional Viscous Confinement and Cooling of Atoms by Resonance Radiation PressureWenjun ZhangÎncă nu există evaluări
- AlgebraDocument66 paginiAlgebraOliseyenum Precious ChukuemekeÎncă nu există evaluări
- Chap005 3Document26 paginiChap005 3Anass BÎncă nu există evaluări
- Solved - Which $1,000 Bond Has The Higher Yield To Maturity, A T...Document4 paginiSolved - Which $1,000 Bond Has The Higher Yield To Maturity, A T...Sanjna ChimnaniÎncă nu există evaluări
- 7FA Upgrade Combustion HardwareDocument2 pagini7FA Upgrade Combustion Hardwaresauerbach1Încă nu există evaluări
- Disc Brake System ReportDocument20 paginiDisc Brake System ReportGovindaram Rajesh100% (1)
- X-Plane Mobile ManualDocument66 paginiX-Plane Mobile ManualRafael MunizÎncă nu există evaluări
- M. Fatur - H1C018040 - PETROLOGIDocument15 paginiM. Fatur - H1C018040 - PETROLOGIFaturrachmanÎncă nu există evaluări
- Practice Question ElectricityDocument3 paginiPractice Question ElectricityIvan SetyawanÎncă nu există evaluări
- Lynx LX v8Document5 paginiLynx LX v8Bambang KaryantoÎncă nu există evaluări