Documente Academic
Documente Profesional
Documente Cultură
Section 3.1, Fundamental of Transmission
Încărcat de
neeraj kumar singhDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Section 3.1, Fundamental of Transmission
Încărcat de
neeraj kumar singhDrepturi de autor:
Formate disponibile
SECTION - 3.
Transmission Units, Line Characteristics, Distortion, Cross Talk,
Impedance Matching in Telecom Network and PCM Principles
Fundamental of Transmission Sec. 3.1
TRANSMISSION UNITS
Introduction
The study of transmission units has a unique importance for communication
engineer who has to maintain and install telecommunication equipments achieving
the standards set up by international consultation committees.
In order to control the quality of wanted signal in the presence of many undesired
signals, we should be able to specify the amount of wanted and unwanted signals at
a point in the telecommunications network.
The components used in the telecommunication circuit either give loss or gain to the
signals they handle. There are certain specific operating conditions to be satisfied for
various components without which the optimum performance cannot be obtained
from these components. For this, it is essential to define conditions that control those
operating conditions. This can be done only if the conditions are specified in terms of
certain units of the quantity the components are to handle.
Transmission Impairments
With analog transmission systems using copper cable there are three major
categories of impairments. They are attenuation, noise, and distortion.
1. Attenuation: There are two commonly used processes to compensate
(overcome) for attenuation or loss:
(a) Repeaters are the most commonly used devices to compensate for
"Loss." However, repeaters amplify the noise along with the signal resulting in
a poor signal to noise ratio.
(b) Signal to Noise Ratio: The ratio of the average signal power (strength) to
the average noise power (strength) at any point in a transmission path.
2. Noise: Any random disturbance or unwanted signal on a transmission facility
that obscures the original signal. Noise is generally caused by the
environment in which the system is operating.
3. Distortion: Inaccurate reproduction of a signal caused by changes in the
signal's waveform, either amplitude or frequency, to compensate for distortion
equalizers may be used. One type of equalizer used in the analog
environment is the load coil. Load coils are used to flatten the frequency
response.
BRBRAITT, Jabalpur, issued on Jan.2006 2
Fundamental of Transmission Sec. 3.1
Note: Generally the higher the frequency the greater the distortion. That is, the
higher voice frequencies attenuate at a higher rate than the lower voice frequencies.
Noise and distortion on a carrier facility can be separated into two types:
(a) Predictable impairments that are almost always present on our facilities.
(b) Unpredictable impairments those are transient in nature and difficult to
overcome.
The Decibel And Neper
Historically speaking ‘attenuation’ was first of all defined in terms of the attenuation
produced by a standard reference cable known as “mile of standard cable”. It
consists of 88 ohms series impedance and 0.54 µF as shunt impedance.
The fundamental objection to this unit was the fact that the attenuation of the
standard cable varied with frequency. With the introduction of systems operating
over different frequency ranges, it became necessary to define a unit which was
independent of frequency .The unit which represents the useful and convenient
concepts in connection with the transmission of signals over telephone lines has
been named and defined as “Bel”(which comes from the name Alexander Graham
Bell -the inventor of Telephone). In practice ,however , a smaller and more
convenient unit called decibel (abbreviated as dB) is used.
Decibel (dB)
One tenth of the common logarithm of the ratio of relative powers, equal to 0.1 B
(bel). The decibel is the conventional relative power ratio, rather than the bel, for
expressing relative powers because the decibel is smaller and therefore more
convenient than the bel. The ratio in dB is given by
X = log P2/P1 B i.e. = 10 log P2/P1 dB
where P 1 and P 2 are the actual powers. Power ratios may be expressed in terms of
voltage and impedance, E and Z, or current and impedance, I and Z. Thus dB is also
given by;
X = 20 log V2/ V1 dB. (when Z 1 = Z 2 )
Note: The dB is used rather than arithmetic ratios or percentages because when
circuits are connected in tandem, expressions of power level, in dB, may be
arithmetically added and subtracted. For example, in an optical link if a known
amount of optical power, in dBm, is launched into a fiber, and the losses, in dB, of
each component (e.g., connectors, splices, and lengths of fiber) are known, the
overall link loss may be quickly calculated with simple addition and subtraction.
BRBRAITT, Jabalpur, issued on Jan.2006 3
Fundamental of Transmission Sec. 3.1
Example 1
Let us look at the following network:
1W Net Work 2W
The input is 1W and its output 2W, therefore,
Gain = 10 log (output)/(input) dB.
= 10 log 2/1 dB= 10 (0.3010) dB=3.101 dB
= 3dB approximately
Example 2
Let us look at another network:
Net Work
1000 W 1W
Loss = 10 log Input/Output =10 log 1000/1 dB =10 log 103 dB
=30 log 10 dB
= 30 dB
Thus a network with an input of 5 W and output of 10 W is said to have
Gain = 10 log 10/5 dB
= 10 log 2 dB
=3.103 dB
= 3 dB.
Let us remember that doubling the power means a 3 dB gain; likewise halving the
power means a 3dB loss.
Example 3
Consider a network with a 13 dB gain:
0.1W ?
Network 13 db gain
Gain = 10 log P2/P1 dB = 10 log P2/0.1 dB =13db
i.e., log P2/0.1 = 1.3or P2/0.1 = antilog 1.3 or
P2 = 0.1 antilog 1.3
P2 = 2W
Example 4
Consider the following network
1W ?W
Network 27 dB loss
BRBRAITT, Jabalpur, issued on Jan.2006 4
Fundamental of Transmission Sec. 3.1
What is the power output of this network? To do this without pencil and paper, we
would proceed as follows:
Suppose the network attenuated the signal by 30 dB. Then the output would be
1/1000 of the input or 1mW.
Now 27 dB loss is 3dB less than 30 dB.
Thus the output would be twice 1m W i.e., 2mW.
(Because the loss is less by 3 dB, the corresponding output will be more i.e. double
but not half)
It is quite simple. Thus, if we have multiples of 10 or 3 up or 3 down from these
multiples, we can work it out in our mind without pencil and paper.
Example 5
Let us take the next example.
10W 3W
Network 6 db gain
We know that the 3 dB gain represents approximately 2 times power gain. So 6 dB
gain means 4 times the gain.
Therefore, the output = 10x4 = 40 (Likewise a 6 dB loss would represent approx. 1/4
of the input power as output i.e. 10/4 = 2.5W)
Example 6
Consider a network of 33 dB gain with an input level of 0.15W. What would be the
output?
30 dB represents multiplying the input power by 1000 and 3 additional dBs double it.
In this case the input power is multiplied by 2000.
Thus the answer is 0.15 x2000 = 300 W.
Now work out the output in the same case if
i. the gain was 36 dB
ii. the loss was 33 dB
The transmission unit normally used is the decibel. The other unit, however, is also
used in some East European countries.
NEPER
The natural logarithm of the ratio of two voltages (or currents) expresses the loss or
gain in Nepers, N
i.e. X= loge V1/V2 (N)
when the loss (gain) is X Neper, V1 and V2 are voltages, then
ex = V1/V2
BRBRAITT, Jabalpur, issued on Jan.2006 5
Fundamental of Transmission Sec. 3.1
Example
The loss of a transmission system is 1N when 2.72 V input voltage produces 1 V
output voltage.
Comparing powers, X= 1/2 loge P1/P2 (N) or e2x = P1/P2
Other transmission units 1 deciNeper (dN) = 0.1 N
1 Centi Neper (cN) = 0.01N
1 MilliNeper (mN) = 0.001 N
Basic derived decibel units
DBm
Till now decibel has referred to ratios or relative units. We cannot say that the output
of an amplifier is 33 dB. We can say that an amplifier has a gain of 33 dB or that a
certain attenuator has a 6 dB loss. These figures or units don't give any idea
whatsoever of absolute level. Whereas, several derived decibels units do.
Perhaps the dBm is the most common of these. By definition dBm is a power level
related to 1 mw. The most important relationship to remember is:
0 dBm = 1mW.
The dBm formula may then be written as:
Power (in dBm) = 10 log Power (mW)/(1mW)
Example
An amplifier has an output of 20 W; what is its output in dBm?
Power (dBm) = 10 log 20 W/1 mW = 10 log 20x103 mW/1mW = +43 dBm.
(The plus sign indicates that the quantity is above the level of reference, 0 dBm.)
dBmO
Decibel referred to 1 mw at zero (0) Transmission level point. dBmO is a measure of
power with reference to Zero dBm at the Reference Transmission Level Point
(RTLP).
The RTLP is also known as Zero Transmission Level Point (0TLP). Powers
measured at any transmission level point can be expressed in dBmO, by correcting
the power measured for the difference in level between the point of measurement
and the RTLP.
BRBRAITT, Jabalpur, issued on Jan.2006 6
Fundamental of Transmission Sec. 3.1
For example, a level of +25 dBm measured at a +17 dB transmission level point is
equivalent to 8 dBmO. Conversely a level of +8 dBmO is also equivalent to +3 dBm
measured at a -5 dB transmission level point. A level expressed in dBmO is,
therefore, only a relative level.
Conversion from Neper to decibel and Vice Versa
We know that decibel is fundamentally a unit of power ratio but it can be used to
express current ratios when the resistive components of the impedance, through
which the current flows, are equal.
The Neper, on the other hand, is fundamentally a unit of current ratio but it can also
be used to express power ratios when the resistive components, of the impedance,
through which the current flows, are equal.
Because of its derivation from the exponential e, the Neper is the most convenient
unit for expressing attenuation in theoretical works. The decibel, on the other hand,
being defined in terms of logarithms to base 10, is a more convenient unit in
practical calculations using the decimal system.
The conditions under which the two units may be used can be summarised in the
following equations, the notation of which is indicated in Fig below.
Where Z1 and Z2 are characteristic impedances
R1 and R2 are pure resistances
G1 and G2 are leakances
β1 and β 2 are phase angles
X1 and X2 are reactance.
Attenuation in dB = 8.686 x attenuation in Nepers
(provided that R1 = R2)
Attenuation in Nepers = 0.1151 x attenuation in dB
(provided that R1 =R2)
BRBRAITT, Jabalpur, issued on Jan.2006 7
Fundamental of Transmission Sec. 3.1
Other Units
In Analogue Transmission system, the quality of communication is mainly assessed
by the value of Signal to noise ratio.
Signal-to-Noise Ratio
It is popularly known as SNR. SNR is the ratio of signal power to the noise power at
any point in a circuit. This ratio is usually expressed in Decibels (dB). For
satisfactory operation of a channel the value of SNR should be sufficiently high i.e.,
the signal power should be sufficiently higher than the noise power.
SNR at any point in a circuit is given as SNR = S/N = Signal Power / Noise Power
Both powers are expressed in watts.
Expressing dBs: SNR = 10 log10 (S/N) dB.
Example: Signal voltage Vs = 0.923 µV; Noise voltage Vn = 0.267 µV, then calculate
the
signal-to-noise ratio.
S/N = Vs2 / Vn2 = 0.923/0.267)2 = 11.95
In decibels, S/N = 10 log10 (11.95) = 10.77 dB.
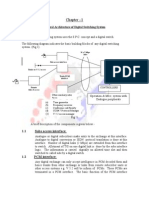
In Digital Transmission system, the quality of communication is mainly assessed by
two factors.
1. BER (Bit Error Ratio)
2. Jitter
These two factors can be taken as Quality Factors as they are used for judging the
quality of Digital Transmission.
Bit Errors
In the digital transmission, the bits transmitted at the transmitting end (1 or 0 ) are
not always detected as 1 or 0 at the receiving end. When the transmitted bit 1 or 0 is
not identified as 1 or 0 at the receiver, the bit is counted as an error bit.
For assessing the real error performance, the bit error ratio (BER) is to be
calculated instead of actual error bits.
Bit Error Rate (BER)
The BER is the measure or error bits with respect to the total number of bits
transmitted in a given time. The total number of bits transmitted can be known from
the bit rate of the digital signal. The bit rate is the number of bits transmitted in one
BRBRAITT, Jabalpur, issued on Jan.2006 8
Fundamental of Transmission Sec. 3.1
second and is specified for each transmission system. Hence, the total number of
bits transmitted in a given time can be counted. In the measurement of BER,
generally the measuring instrument measures the number of bits transmitted in a
given time.
The time setting can be from a few seconds to a few hours, depending on the
feasibility. The standards are set by ITU (International Telecommunication Union).
The time set for the measurement of BER, is called gating time. Larger the gating
time better is the assessment of BER. But for the measurement of BER, the Digital
Equipment has to be taken off-line.
Digital communication can just run with one error bit in one thousand bits received.
For more than one error bit, in one thousand bits received, communication gets
affected.
For good quality communication, the requirement is, not more than one error bit in
one million bits.
JITTER
Abrupt and unwanted variations of one or more signal characteristics, such as the
interval between successive pulses, the amplitude of successive cycles, or the
frequency or phase of successive cycles. Jitter must be specified in qualitative
terms (e.g., amplitude, phase, pulse width or pulse position) and in quantitative
terms (e.g., average, RMS, or peak-to-peak). The low-frequency cut-off for jitter is
usually specified at 1 Hz. Contrast with drift, wander.
Short term variations of the significant instances of a digital signal from their
reference position in time.( Short term frequency equal to or greater than 10 Hz.).
Long term variations of significant instances of a digital signal from their ideal
positions in time, are called wander. (Long-term variations – frequency less than 10
Hz).
Drift: A comparatively long-term change in an attribute or value of a system or
equipment operational parameter. The drift should be characterized, such as "diurnal
frequency drift" and "output level drift." Drift is usually undesirable and unidirectional,
but may be bi-directional, cyclic, or of such long-term duration and low excursion
rate as to be negligible.
Wander: Relative to Jitter and swim, long-term random variations of the significant
instants of a digital signal from their ideal positions. Wander variations are those that
occur over a period greater than 1 s (second). Jitter, swim, wander, and drift have
increasing periods of variation in that order.
Swim: Slow, graceful, undesired movements of display elements, groups, or images
about their mean position on a display surface, such as that of a monitor. Swim can
be followed by the human eye, whereas Jitter usually appears as a blur.
BRBRAITT, Jabalpur, issued on Jan.2006 9
Fundamental of Transmission Sec. 3.1
Jitter, like BER, is another transmission impairment. It is not very significant in the
case of voice signal transmission but it has a great impact in the transmission of
data signals, especially with high-speed digital transmission. The present bit rates
are as high as 565 Mb/s and (140 x 16) Mb/s. Today Jitter is considered as a
performance parameter of any digital transmission system.
For example, Jitter due to unwanted phase change is called Phase Jitter. The
amount of change of phase, converted into time, is generally expressed in milli-
seconds or nano-seconds.
BER and Jitter are the unwanted by products of any transmission system and they
get associated with the transmission path and affect the quality of transmission. Bit
Errors beyond a limit, affect the communication and Jitter in the digital transmission
system, is a source of generation of errors.
Digital Transmission Analyser (DTA) is used for the measurement of both BER and
Jitter.
Digital Transmission - Performance Criteria ( General)
1 in 106 (1.OE – 6) : Better
1 in 105 (1.OE – 5) : Good
1 in 104 (1.OE – 4) : Reasonably good
1 in 103 (1.OE – 3) : Just Acceptable
More than 1 in 103 : Unacceptable
Bit errors greatly affect data service.
For data channels 1 in 109 (1.OE – 9) is normally realizable.
Quality Parameters
To pin point the exact number of seconds or minutes, in which the bit errors take
place and up to what extent, the quality parameters are defined.
The quality parameters are:
1. Error Seconds (ES)
2. Severely Error Seconds (SES)
3. Non Severely Error Seconds (NSES)
4. Degraded Minutes (DM).
Error Seconds (ES): Number of one-second intervals with one or more errors.
Severely Error Seconds (SES): Number of one-second intervals with an error rate,
worse than 1.OE-3
Non-Severely Error Seconds (NSES): Number of one-second intervals with an
error rate, better than or equal to 1.OE-3.
BRBRAITT, Jabalpur, issued on Jan.2006 10
Fundamental of Transmission Sec. 3.1
Degraded Minutes (DM): Number of one-second intervals with a bit error rates
worse than 1.OE-6.
Available and non-available time
A period of available time begins with a period of ten consecutive seconds each of
which has a BER better than 1.0E-3. These 10 seconds are considered to be
available time.
A period of unavailable time begins when the bit error rate in each second is worse
than 1.0E-3 for a period of 10 consecutive seconds. These 10 consecutive seconds
are considered to be unavailable time.
BRBRAITT, Jabalpur, issued on Jan.2006 11
Fundamental of Transmission Sec. 3.1
LINE CHARACTERISTICS
Introduction
Line transmission is the theory of the propagation of electric waves along
transmission lines. These transmission lines are assumed to consist of a pair of
wires that are uniform throughout their whole length. When this uniformity holds
good, it is immaterial, for the general theory, whether the two wires are air-spaced on
telegraph poles, are two conductors in our underground cable, or form a pair in a
field quad cable.
The infinite line
The propagation of elastic waves along any uniform and symmetrical transmission
line may be deduced in terms of the results for a hypothetical line of infinite length
having electrical constants per unit length identical to those of the line under
consideration. For this reason, the propagation of electric waves along an infinite line
will be considered first.
When an alternating voltage is applied to the sending end of an infinite length of line,
a finite current will flow due to the capacitance and the leakage conductance
between the two wires constituting the line.
The ratio of the voltage applied, to the current flowing, will give the input impedance.
This input impedance is known as the “ characteristic impedance” of the line, and
is denoted by ZO.
The characteristic impedance of any line is defined as the impedance looking into an
infinite length of the line.
Short line terminated in Zo
BRBRAITT, Jabalpur, issued on Jan.2006 12
Fundamental of Transmission Sec. 3.1
Consider an infinite line having input terminals 1 and 2 as in fig 2(a). The impedance
looking in at terminals 1 and 2 will, by definition, be Zo.
Suppose that a short section AB at the near end of the line is now removed [fig 2(b)],
so that the line now starts at terminals 3 and 4. The impedance looking in at
terminals 3 and 4 will still be ZO, since the removal of the short section does not
affect the infinite nature of the line. This means that the short section AB, from the
electrical point of view, was originally terminated in impedance ZO at B. If the short
section AB is now terminated in actual impedance ZO, the current and voltage at all
points along its length will be exactly the same as if it were terminated in an infinite
length of line.
Therefore, it follows that any short line terminated in ZO behaves electrically, at all
points along its length, as if it were an infinite line.
Determination of ZO for a short line
A short line may be considered as a complex network and can be represented as by
a T section. If the short line is terminated in ZO, it will behave as an infinite line, and
have input impedance ZO. Since the T section represents the line, it also must have
input impedance ZO.
Let the equivalent T section have series arms Z1/2, Z1/2 and shunt arm Z2 as in fig.3.
BRBRAITT, Jabalpur, issued on Jan.2006 13
Fundamental of Transmission Sec. 3.1
Hence for a short line, ZO can be determined if Z1 and Z2 can be found. This
will require two equations, which may be obtained by measuring the impedance
using two different terminating impedances. For convenience these termination will
be taken as zero and infinity.
Let the input impedance with an infinite- impedance termination i.e. open- circuit, be
Zoc. As in fig. 4(a)
ZOC = Z1 + Z2 ..................... (1)
2
Let the input impedance with a zero impedance termination i.e., short- circuit, be
Zsc. As in fig 4(b).
BRBRAITT, Jabalpur, issued on Jan.2006 14
Fundamental of Transmission Sec. 3.1
Therefore, the characteristic impedance of a line is the geometric mean of the
open and closed circuit impedance.
Note: The following measurements have been made on a line at 1600 Hz.
Zoc = 900Ω∠-30°
Zsc = 400Ω∠-10°
Zo = √Zoc x Zsc
= √900Ω∠-30° x 400Ω∠-10°
= 600 Ω∠-20°
Currents and Voltages along an infinite line
Consider a current IS applied to the sending end A of an infinite line as in fig 5(a). At
the point B, at a distance of one mile down the line, let the current be I1.
BRBRAITT, Jabalpur, issued on Jan.2006 15
Fundamental of Transmission Sec. 3.1
Fig 5. Currents along an infinite line.
Due to the loss introduced by the line, the current I1 will be less than IS and also a
phase-shift will be introduced. Therefore the ratio IS / I1 will be a vector quantity.
A convenient way of representing a vector quantity is in the form eγ, where γ is a
complex quantity.
Hence, let IS / I1= eγ.
Where γ is known as the "propagation constant” per mile of the line.
Attenuation and phase constants
The propagation constant, γ is a complex quantity. Let it be equal to α+ jβ.
IS /I1= e γ = eα+ jβ.
= eα∠β
IS /I1 = eα and angle of Is /I1 = ∠β
Hence α = loge IS /I1
α is known as the attenuation constant per mile of the line and is measured in
Nepers.
β is known as the phase constant or wavelength constant per mile of the line, and is
measured in radians per mile.
If the length of the lime is n miles, then
IS/In = enχ = enα+njβ
BRBRAITT, Jabalpur, issued on Jan.2006 16
Fundamental of Transmission Sec. 3.1
= e ∠nβ
nα
The attenuation of such a line is nα Nepers and the phase shift is nβ radians.
Line constants
A practical line has a characteristic impedance, a propagation constant γ an
attenuation constant α , and a phase constant β . These are known as “ secondary
line constants.” Although they are referred to as constants, in general, all will vary if
the frequency is changed.
The “ primary line constants’ (which, for the purpose of transmission theory, are
assumed to be independent of frequency) are R, G, L and C where
R is the resistance per mile of the line, measured in ohms.
G is the leakance per mile of the line, measured in mhos.
L is the inductance per mile of the line, measured in henries
C is the capacitance per mile of the line, measured in farads.
They are measured considering both conductors, i.e. per mile loop. These primary
constants may be obtained by measurements on a sample of the line.
Relationship between primary and secondary line constants
Consider a short length of line, l mile long. This short section will have a
resistance Rl, a leakance Gl, an inductance Ll, and a capacitance Cl. Its
characteristic impedance will be Z0, the same as that of the complete line. Its
propagation constant will be γl, where γ is the propagation constant per mile of the
complete line. This short section of line may be represented as
If the length of the section is very small, Z1 will be approximately equal to the
series impedance of the section. i.e. Rl + jwLl; and Z 2 will be approximately equal to
the shunt impedance of the section, i.e. 1/Gl+jwCl.
BRBRAITT, Jabalpur, issued on Jan.2006 17
Fundamental of Transmission Sec. 3.1
The accuracy of the statement increases as l decreases, and in order to obtain an
accurate answer it will be assumed that the section is so small that l tends to zero.
Determination Z0 in terms of primary constants
It has been shown that for a T section
when ‘w’ is very small, Z0 → √R/G
when ‘w’ is very large, Z0 → √L/C
Since R/G, in all cases, is greater than L/C, the variation of Z0 with frequency,
expected for a practical line, will be as in fig 6.
Fig. 6 Characteristic impedance of a line.
Determination of γ in terms of primary constants
BRBRAITT, Jabalpur, issued on Jan.2006 18
Fundamental of Transmission Sec. 3.1
γ = √(R+jwL)(G+jwC)
α and β are given by the following equations respectively.
BRBRAITT, Jabalpur, issued on Jan.2006 19
Fundamental of Transmission Sec. 3.1
DISTORTION IN TELECOMMUNICATION CIRCUITS
Introduction
A signal is said to have suffered distortion if, after passing through a network,
(passive* or active **)
is not an exact replica of the original signal in respect of its amplitude wave shape.
* A passive network does not require power supply. It may consist of resistors, coils
and condensers either singly or in different combinations e.g. attenuators and filters
are passive networks.
** An active network is one that invariably requires power supply. It may consist of an
electron tube, a transistor or an IC chip in combination with other components like
resistors, coils, and condensers e.g. an amplifier or an oscillator.
Signal distortion is of two kinds.
a) Linear distortion
b) Non linear distortion
Linear distortion takes place in passive networks. Different types of linear distortion
are;
1. Attenuation distortion
2. Phase distortion
Imperfect attenuation, frequency response and phase-frequency characteristic of a
network cause attenuation and phase distortions respectively. Non-linear distortion
takes place in active networks only and is caused by their excessive loading.
Different types of non-linear distortion are;
a. Amplitude distortion
b. Frequency distortion
c. Inter-modulation distortion
Attenuation distortion
The term attenuation distortion is employed to the case of a transmission system
where there is variation of gain or loss with frequency. It is assessed with the system
operated under steady- state condition by applying a series of sinusoidal wave-
forms at different frequencies. Fig.1 shows the amplitude- frequency characteristics
of an open wire line. Curve A depicts an ideal open wire line with no attenuation
distortion. Curve B pertains to the practical one.
BRBRAITT, Jabalpur, issued on Jan.2006 20
Fundamental of Transmission Sec. 3.1
As is clear from the figure, higher frequencies are attenuated more than the
lower ones. An ideal band-pass filter should give same loss to all the frequencies of
the pass-band but in actual practice it is not so. The above figure shows a typical
attenuation distortion curve for a voice channel. Curve A shows the attenuation-
frequency response of an ideal band pass filter and curve B shows the attenuation
distortion in the case of a practical band pass filter. As such the network is designed
in such a manner that attenuation distortion caused by it remains within permissible
limits.
However, in the case of open wire carrier lines, equalizers are used to bring
amplitude distortion within limits.
BRBRAITT, Jabalpur, issued on Jan.2006 21
Fundamental of Transmission Sec. 3.1
Phase distortion (Envelope delay distortion)
Phase distortion takes place when the time of propagation through a
transmission system varies with frequency. Owing to the different relative phase
relationships than existing, the output waveform may appear to be quite different
from the input waveform, even though the same frequencies are available in the
same relative amplitude.
Non-linear distortion
"Non linear distortion" is the general name given to a certain type of distortion
that occurs when the transmission properties of a system are dependent on the
instantaneous magnitude of the applied signal. It is further sub-divided as under:
a) Amplitude distortion.
b) Harmonic distortion.
c) Inter-modulation distortion.
Amplitude distortion
It is defined as the variation of gain or loss of a system with the amplitude of the
input. It is measured with the system operated under steady- state conditions with an
input of sinusoidal waveform.
Harmonic distortion
It is due to the production of harmonics in the output when a sinusoidal input of
specified amplitude is applied. It is expressed as the ratio of the RMS voltage of all
the harmonics in the output, to the total RMS voltage at the output.
Inter-modulation distortion
It is due to the production of combination frequencies in the output when two or more
sinusoidal voltages of specified amplitude are applied at the input. For two parent
frequencies p and q, the output may contain frequencies such as (p± q), (1p± q), (p±
2q) etc. in addition to the frequencies p and q.
BRBRAITT, Jabalpur, issued on Jan.2006 22
Fundamental of Transmission Sec. 3.1
CROSS-TALK IN TRANSMISSION MEDIA
Introduction
Any disturbing signal produced by transfer of unwanted power from one
transmission path (called disturbing circuit) to another transmission path (called
disturbed circuit) is known as cross talk.
Cross talk may be produced by
• Galvanic, capacitive or inductive couplings between transmission media
(Linear cross-talk) e.g. between pairs of a VF (voice frequency) cable
system.
• Poor control of frequency response i.e. defective filters or poor filter design
is the cause.
• Non-linear performance in analogue (FDM) multiplex systems. A signal
transmitted on one circuit or channel of a transmission system (multi-
channel) creates an undesired effect in another circuit or channel (non-
linear cross talk)
Types of cross talk
Broadly speaking, cross talk is of six types.
1. Near-end cross- talk (NEXT).
2. Far-end cross talk (FEXT).
3. Intelligible cross-talk
4. Unintelligible cross-talk
5. Interaction cross-talk
6. Reflected cross-talk
Near-end cross talk (NEXT)
Near-end cross talk occurs if the cross talk power in the disturbed channel
propagates in the direction opposite to the propagation of useful power in the
disturbing channel. Refer to figure for illustration of near-end cross talk.
The terminals of the disturbed channel, at which the near-end cross talk is present,
and the energized terminal of the disturbing channel, are usually near each other.
The near-end cross talk is much stronger than far-end cross talk because the
magnetic (or galvanic) and electrostatic inductions are additive in the case of near-
end cross talk and the inducing current in the disturbing circuit is much stronger.
BRBRAITT, Jabalpur, issued on Jan.2006 23
Fundamental of Transmission Sec. 3.1
Far-end cross-talk (FEXT)
It occurs if the cross talk power in the disturbed channel propagates in the direction
of the propagation of the useful power in the disturbing channel. Refer to Fig. 2 for
illustration of far-end cross talk. The terminals of the disturbed channel, at which the
far-end cross talk is present, and the energized terminals of the disturbing channel,
are usually remote from each other. Far-end cross talk is less effective in impairment
of the original signal in the disturbed circuit because the magnetic and electrostatic
inductions are subtractive. Also the inducing current in the disturbing circuit gets very
much attenuated after it has travelled to the far end.
Intelligible cross talk
The cross talk is intelligible when the whole or an important part, of the speech on
the disturbing circuit is intelligible on the disturbed circuit. Between circuits
transmitting the same frequency band or working without frequency translation
(audio-frequency) only intelligible cross talk can arise. As the secrecy of the
conversation is affected by intelligible cross talk, steps should be taken to see that
intelligibility of sentence articulation of the cross talk should be less than 10%.
BRBRAITT, Jabalpur, issued on Jan.2006 24
Fundamental of Transmission Sec. 3.1
Unintelligible cross talk (also called noise)
The cross talk is unintelligible when the disturbing circuit gives rise only to noise in
the disturbed circuit. It decreases the intelligibility but does not endanger the secrecy
of conversation. Unintelligible cross talk occurs
• Between carrier channels having different frequency allocations.
• Between carrier channels having virtual carrier frequencies essentially
differing from each other and
• In consequence of non-linear distortion.
Interaction cross talk (Indirect cross talk)
Interaction cross talk conveyed by a third circuit from the disturbing circuit to the
disturbed circuit, where it causes far end cross talk (fig.3). This type of cross talk is
also called double near-end cross talk. It occurs mainly in two-wire carrier systems
fitted with intermediate repeaters.
Fig3. Interaction Cross Talk (Double Near End Cross Talk)
Reflected cross-talk
Indirect cross talk caused by reflection due to mismatch of the circuit is called
reflected cross talk.
BRBRAITT, Jabalpur, issued on Jan.2006 25
Fundamental of Transmission Sec. 3.1
I - Disturbing Circuit.
II – Disturbed Circuit.
(a) Reflected near-end cross talk causes far- end cross talk.
(b) Near-end cross talk caused by reflected wave at far-end causes FEXT.
Causes of cross-talk
Cross talk is mainly caused by two types of induction viz., Magnetic and
Electrostatic.
Magnetic induction
It is well known that a change in magnetic lines of forces is associated with the flow
of electric currents. The magnetic lines of forces due to currents flowing through
circuit A will also embrace the wires of circuit B. As the current in circuit A alternates,
the magnetic field also alternates, and according to Faraday' law it induces e.m.fs in
the wires of circuit B
Electrostatic induction
Electrostatic induction occurs due to the capacitance between four wires of the two
circuits that are built side by side.
Practically it is noted that the current due to magnetic induction flows in one direction
in the entire circuit, whereas that due to the electric induction flows through the two
sections in opposite directions
Methods for reducing cross talk
BRBRAITT, Jabalpur, issued on Jan.2006 26
Fundamental of Transmission Sec. 3.1
There are a number of methods for eliminating or at least substantially reducing
cross talk in open-wire lines. Since the cross talk reduction in open wire lines
depends upon three factors viz. Wire configuration, transposition and resistance
unbalance. One possible method is to arrange the wires in such a configuration that
the effect of the electric and magnetic fields of one pair will be the same on both
wires of the disturbed pair, thus leaving no residual difference to cause currents in
the disturbed circuit.
Another method to reduce the cross-talk is to reduce the separation between the
wires of either or both disturbing and the disturbed pairs and, if possible, to increase
the separation between the pairs themselves.
The most commonly used method is the use of " transpositions".
Transposition means interchanging the position of the two wires forming the pair at
regular intervals on the pole route, right through the length of the pair. The
transposition is by far the most effective and practical method of reducing cross talk.
BRBRAITT, Jabalpur, issued on Jan.2006 27
Fundamental of Transmission Sec. 3.1
IMPEDANCE MATCHING IN TELECOM NETWORK
Introduction
In telecom networks, such as attenuators, equalizers and amplifiers etc., impedance
matching is of paramount importance to affect the transfer of maximum energy from
one telecom network into another.
Correct impedance matching also reduces the impairment to the transmission of
telecom signals. For example in the case of impedance mismatch between the two
telecom networks, say a cable pair and an amplifier input terminals, reflection of the
signal takes place and the reflected signal travels back to the talking subscriber. It
amounts to echo and is extremely annoying to the talker and can interfere with his
normal process of speech.
Impedance matching
Since it can be designed to have any desired impedance values looking in either
direction, a simple resistance pad can be used to match any two resistive-
impedance. It, however introduces high attenuation loss.
Impedance may also be matched by a T or X pads made up entirely of inductors and
capacitors. Though such a pad would introduce relatively little loss, its effectiveness
as an impedance matching device would be limited to the frequency for which the
reactance values have been determined. Repeating coils and transformers come
under this category.
The reading of power level at a point in a circuit can be obtained in two ways.
(a) Level or through measurement,
(b) Transmission terminating or loss measurement.
Level or through measurement
A level measurement is obtained by tapping a high-impedance voltmeter across the
circuit, as in Fig 1.
The high impedance of the meter is essential to ensure that it will not disturb the
circuit under test. (Ex. a 5000 ohms meter will introduce a shunt loss of 0.5 dB). If
the impedance of the circuit under test is 600 ohms, the meter will give correct
reading in dBs.
Any variation in circuit impedance from 600 ohms will destroy the accuracy of the
measurement. In case, however the impedance is known, a correction factor may be
applied.
BRBRAITT, Jabalpur, issued on Jan.2006 28
Fundamental of Transmission Sec. 3.1
In transmission circuits, sometimes the impedance encountered is 75 ohms or 150 ohms
instead of the standard 600 ohms impedance. Correction factors for that impedance are
calculated below:
E = voltage at a point in a circuit.
150 = impedance at the said point. Power indicated on dB meter = E2 /
600
Actual Power = E2 / 150
Error = 10 log10 150/600 = 6 dB
i.e. the meter will read 6 dB. Which implies that 6 dB is to be added to the meter
reading to arrive at the correct power level. Similarly, the correction factor for level
measurement at a point of 75 ohms impedance is -9 dB.
Transmission, terminating or loss measurement
A transmission measurement is made by terminating the circuit in a 600 ohms
resistance and measuring the voltage across it using the meter. Refer fig.
BRBRAITT, Jabalpur, issued on Jan.2006 29
Fundamental of Transmission Sec. 3.1
Many decibel meters having both facilities, a high impedance meter being used, the
600 ohms resistance for TRANS measurement being brought into circuit by
operation of a switch and failure to cut off the 600 ohms when making a LEVEL
measurement will give a reading that is 3.52 dB low. The meter shows E/3 where as
voltage reading should be E / 2.
Discrepancy of reading = 20 log 2 / 3
= - 3. 52 dB.
Reflection loss
The phenomenon of reflection is very common in our every day life. When we look
into a mirror or hear an echo, we know that these are due to reflection of light and
sound wave respectively. From these, it can be deduced that any wave suffers
reflection whenever there is an abrupt change of medium through which the wave is
propagating.
In the case when electromagnetic energy being propagated over a transmission line,
the wave motion is guided, between the two wires constituting the line and is called
a “ guided “ wave or a “ travelling “ wave. The transmission line may further be
connected to equipment or to another transmission line having different electrical
characteristics, thus causing change of medium and hence reflection of energy takes
place. The electrical characteristic that causes reflection is the impedance of
medium. Any variation in impedance will cause reflection. Similarly impedance
mismatch in networks (active or passive) causes reflection.
One direct consequence of reflection is that the amount of power transferred to the
load differs from that when matching conditions exist. All theoretical treatments of
networks and transmission lines are based on the condition of perfect matching,
which can only be approximated in practical applications. Hence the difference
between the matched and non-matched condition is expressed as a “ Reflection loss
“
Return loss
Return loss is defined as,
20 log 1 / reflection co-efficient
in which, Reflection co-efficient = reflected signal / incident signal at the point of
impedance discontinuity or impedance mismatch
BRBRAITT, Jabalpur, issued on Jan.2006 30
Fundamental of Transmission Sec. 3.1
PCM PRINCIPLES
1.0 INTRODUCTION
1.1 A long distance or local telephone conversation between two persons
could be provided by using a pair of open wire lines or underground
cable as early as early as mid of 19th century. However, due to fast
industrial development and an increased telephone awareness,
demand for trunk and local traffic went on increasing at a rapid rate. To
cater to the increased demand of traffic between two stations or
between two subscribers at the same station we resorted to the use of
an increased number of pairs on either the open wire alignment, or in
underground cable. This could solve the problem for some time only as
there is a limit to the number of open wire pairs that can be installed on
one alignment due to headway consideration and maintenance
problems. Similarly increasing the number of open wire pairs that can
be installed on one alignment due to headway consideration and
maintenance problems. Similarly increasing the number of pairs to the
underground cable is uneconomical and leads to maintenance
problems.
1.2 It, therefore, became imperative to think of new technical innovations
which could exploit the available bandwidth of transmission media such
as open wire lines or underground cables to provide more number of
circuits on one pair. The technique used to provide a number of circuits
using a single transmission link is called Multiplexing.
2.0 MULTIPLEXING TECHNIQUES
2.1 There are basically two types of multiplexing techniques
i. Frequency Division Multiplexing (FDM)
ii Time Division Multiplexing (TDM)
BRBRAITT, Jabalpur, issued on Jan.2006 31
Fundamental of Transmission Sec. 3.1
2.2 Frequency Division Multiplexing Techniques (FDM)
The FDM techniques is the process of translating individual speech
circuits (300-3400 Hz) into pre-assigned frequency slots within the
bandwidth of the transmission medium. The frequency translation is
done by amplitude modulation of the audio frequency with an
appropriate carrier frequency. At the output of the modulator a filter
network is connected to select either a lower or an upper side band.
Since the intelligence is carried in either side band, single side band
suppressed carrier mode of AM is used. This results in substantial
saving of bandwidth mid also permits the use of low power amplifiers.
Please refer Fig. 1.
FDM techniques usually find their application in analogue transmission systems.
An analogue transmission system is one which is used for transmitting
continuously varying signals.
2.3 Time Division Multiplexing
2.3.1 Basically, time division multiplexing involves nothing more than sharing
a transmission medium by a number of circuits in time domain by
establishing a sequence of time slots during which individual channels
(circuits) can be transmitted. Thus the entire bandwidth is periodically
BRBRAITT, Jabalpur, issued on Jan.2006 32
Fundamental of Transmission Sec. 3.1
available to each channel. Normally all time slots1 are equal in length. Each
channel is assigned a time slot with a specific common repetition period called
a frame interval. This is illustrated in Fig. 2.
2.3.2 Each channel is sampled at a specified rate and transmitted for a fixed
duration. All channels are sampled one by, the cycle is repeated again
and again. The channels are connected to individual gates which are
opened one by one in a fixed sequence. At the receiving end also
similar gates are opened in unision with the gates at the transmitting
end.
2.3.3 The signal received at the receiving end will be in the form of discrete
samples and these are combined to reproduce the original signal. Thus, at
a given instant of time, onty one channel is transmitted through the medium, and
by sequential sampling a number of channels can be staggered in time as
opposed to transmitting all the channel at the same time as in EDM
systems. This staggering of channels in time sequence for transmission
over a common medium is called Time Division Multiplexing (TDM).
BRBRAITT, Jabalpur, issued on Jan.2006 33
Fundamental of Transmission Sec. 3.1
3.0 PULSE CODE MODULATION SYSTEM
3.1 It was only in 1938, Mr. A.M. Reaves (USA) developed a Pulse
Code Modulation (PCM) system to transmit the spoken word in
digital form. Since then digital speech transmission has become an
alternative to the analogue systems.
3.2 PCM systems use TDM technique to provide a number of circuits
on the same transmission medium viz open wire or underground cable
pair or a channel provided by carrier, coaxial, microwave or satellite
system.
3.3 Basic Requirements For PCM System
To develop a PCM signal from several analogue signals, the
following processing steps are required
BRBRAITT, Jabalpur, issued on Jan.2006 34
Fundamental of Transmission Sec. 3.1
•Filtering
•Sampling
•Quantisation
•Encoding
•Line Coding
4.0 FILTERING
4.1 Filters are used to limit the speech signal to the frequency band 300-
3400 Hz.
5.0 SAMPLING
5.1 It is the most basic requirement for TDM. Suppose we have an
analogue signal Fig. 3 (b), which is applied across a resistor R through a
switch S as shown in Fig. 3 (a) . Whenever switch S is closed, an
output appears across R. The rate at which S is closed is called the
sampling frequency because during the make periods of S, the
samples of the analogue modulating signal appear across R. Fig. 3(d)
is a stream of samples of the input signal which appear across R. The
amplitude of the sample is depend upon the amplitude of the input
signal at the instant of sampling. The duration of these sampled pulses
is equal to the duration for which the switch S is closed. Minimum
number of samples are to be sent for any band limited signal to get a
good approximation of the original analogue signal and the same is
defined by the sampling Theorem.
BRBRAITT, Jabalpur, issued on Jan.2006 35
Fundamental of Transmission Sec. 3.1
FIG. 3 : SAMPLING PROCESS
5.3 Sampling Theorem
5.3.1 A complex signal such as human speech has a wide range of
frequency components with the amplitude of the signal being different
at different frequencies. To put it in a different way, a complex signal
will have certain amplitudes for all frequency components of which the
signal is made. Let us say that these frequency components occupy a
certain bandwidth B. If a signal does not have any value beyond this
bandwidth B, then it is said to be band limited. The extent of B is
determined by the highest frequency components of the signal.
5.3.2 Sampling Theorem States
"If a band limited signal is sampled at regular intervals of time and at a
rate equal to or more than twice the highest signal frequency in the
band, then the sample contains all the information of the original
signal." Mathematically, if fH is the highest frequency in the signal to be
sampled then the sampling frequency Fs needs to be greater than 2 fH.
i.e. Fs>2fH
5.3.3 Let us say our voice signals are band limited to 4 KHz and let sampling
frequency be 8 KHz.
BRBRAITT, Jabalpur, issued on Jan.2006 36
Fundamental of Transmission Sec. 3.1
Time period of sampling Ts = 1 sec
8000
or Ts = 125 micro seconds
If we have just one channel, then this can be sampled every 125 microseconds
and the resultant samples will represent the original signal. But, if we are to
sample N channels one by one at the rate specified by the sampling theorem,
then the time available for sampling each channel would be equal to Ts/N
microseconds.
5.3.4 Fig. .4 shows how a number of channels can be sampled and
combined.
The channel gates (a, b ... n) correspond to the switch S in Fig. 3. These
gates are opened by a series of pulses called "Clock pulses". These are called
gates because, when closed these actually connect the channels to the
transmission medium during the clock period and isolate them during the OFF
periods of the clock pulses. The clock pulses are staggered so that only one
pair of gates is open at any given instant and, therefore, only one channel is
connected to the transmission medium. The time intervals during which the
common transmission medium is allocated to a particular channel is called the
Time Slot for that channel. The width of.this time slot will depend, as stated
above, upon the number of channels to be combined and the clock pulse
frequency i.e. the sampling frequency.
BRBRAITT, Jabalpur, issued on Jan.2006 37
Fundamental of Transmission Sec. 3.1
FIG. 4: SAMPLING & COMBINING CHANNELS
5.3 In a 30 channel PCM system. TS i.e. 125 microseconds are divided into
32 parts. That is 30 time slots are used for 30 speech signals, one time
slot for signalling of all the 30 chls, and one time slot for
synchronization between Transmitter & Receiver.
The time available per channel would be Ts/N = 125/32
= 3.9 microseconds
Thus in a 30 channel PCM system, time slot is 3.9 microseconds and time
period of sampling i.e..the interval between 2 consecutive samples of a channel
is 125 microseconds. This duration i.e. 125 microseconds is called Time
Frame.
5.4 The signals on the common medium (also called the common highway)
of a TDM system will consist of a series of pulses, the amplitudes of
which are proportional to the amplitudes of the individual channels at
their respective sampling instants. This is illustrated in Fig. 5
BRBRAITT, Jabalpur, issued on Jan.2006 38
Fundamental of Transmission Sec. 3.1
FIG 5 : PAM OUTPUT SIGNALS
5.5 The original signal for each channel can be recovered at the receive end by
applying gate pulses at appropriate instants and passing the signals through
low pass filters. (Refer Fig. 6)
Fig. 6 : RECONSTRUCTION OF ORIGINAL SIGNAL
BRBRAITT, Jabalpur, issued on Jan.2006 39
Fundamental of Transmission Sec. 3.1
6.0 QUANTISATION
6.1 In FDM systems we convey the speech signals in their analogue
electrical form. But in PCM, we convey the speech in discrete form. The
sampler selects a number of points on the analogue speech signal (by
sampling process) and measures their instant values. The output of the
sampler is a PAM signal as shown in Fig. 3; The transmission of PAM
signal will require linear amplifiers at trans and receive ends to recover
distortion less signals. This type of transmission is susceptible to all the
disadvantages of AM signal transmission. Therefore, in PCM systems,
PAM signals are converted into digital form by using Quantization
Principles. The discrete level of each sampled signal is quantified with
reference to a certain specified level on an amplitude scale.
6.2 The process of measuring the numerical values of the samples and
giving them a table value in a suitable scale is called "Quantising". Of
course, the scales and the number of points should be so chosen that
the signal could be effectively reconstructed after demodulation.
6.3 Quantising, in other words, can be defined as a process of breaking
down a continuous amplitude range into a finite number of amplitude
values or steps.
6.4 A sampled signal exists only at discrete times but its amplitude is drawn
from a continuous range of amplitudes of an analogue signal. On this
basis, an infinite number of amplitude values is possible. A suitable
finite number of discrete values can be used to get an. approximation of
the infinite set. The discrete value of a sample is measured by
comparing it with a scale having a finite number of intervals and
identifying the interval in which the sample falls. The finite number of
amplitude intervals is called the "quantizing interval". Thus, quantizing
means to divide the analogue signal's total amplitude range into a
number of quantizing intervals and assigning a level to each intervals.
For example, a 1 volt signal can be divided into 10mV ranges like 10-
20mV, 30-40mV and so on. The interval 10-20 mV, may be designated
as level 1, 20-30 mV as level 2 etc. For the purpose of transmission,
BRBRAITT, Jabalpur, issued on Jan.2006 40
Fundamental of Transmission Sec. 3.1
these levels are given a binary code. This is called encoding. In practical
systems-quantizing and encoding are a combined process. For the
sake of understanding, these are treated separately.
6.5 Quantizing Process
6.5.1 Suppose we have a signal as shown in Fig. 7 which is sampled at instants a,
b, c, d and e. For the sake of explanation, let us suppose that the signal has
maximum amplitude of 7 volts.
In order to quantize these five samples taken of the signal, let us say the total
amplitude is divided into eight ranges or intervals as shown in Fig. 7. Sample
(a) lies in the 5th range. Accordingly, the quantizing process will assign a
binary code corresponding to this i.e. 101, Similarly codes are assigned for
other samples also. Here the quantizing intervals are of the same size.
This is called Linear Quantizing.
FIG. 7 : QUANTIZING-POSITIVE SIGNAL
6.5.2Assigning an interval of 5 for sample 1, 7 for 2 etc. is the quantizing
process. Giving, the assigned levels of samples, the binary code is
called coding of the quantized samples.
6.5.3Quantizing is done for both positive and negative swings. As shown in
Fig. 6, eight quantizing levels are used for each direction of the
analogue signal. To indicate whether a sample is negative with
reference to zero or is positive with reference zero, an extra digit is
BRBRAITT, Jabalpur, issued on Jan.2006 41
Fundamental of Transmission Sec. 3.1
added to the binary code. This extra digit is called the "sign bit". In Fig.
8. positive values have a sign bit of ' 1 ' and negative values have sign
bit of'0'.
FIG. 8 : QUANTIZING - SIGNAL WITH + Ve & - Ve VALUES
6.6 Relation between Binary Codes and Number of levels.
6.1 Because the quantized samples are coded in binary form, the quantization
intervals will be in powers of 2. If we have a 4 bit code, then we can have 2" =
16 levels. Practical PCM systems use an eight bit code with the first bit as
sign bit. It means we can have 2" = 256 (128 levels in the positive direction
and 128 levels in the negative direction) intervals for quantizing.
6.7 Quantization Distortion
Practically in quantization we assign lower value of each interval to a sample
falling in any particular interval and this value is given as
BRBRAITT, Jabalpur, issued on Jan.2006 42
Fundamental of Transmission Sec. 3.1
Table-1 : Illustration of Quantization Distortion
Analogue SignalQuantizing Interval Quantizing Level Binary Code
Amplitude Range (mid value)
0-10 mv 5 mv 0 1000
10-20mv 15mv 1 1001
20-30 mv 25 mv 2 1010
30-40 mv 35 mv 3 1011
40-50 mv 45 mv 4 1100
If a sample has an amplitude of say 23 mv or 28 mv, in either case it will be assigned
\he \eve\ "2". This Is represented in binary code 1010. When this is decoded at the
receiving end, the decoder circuit on receiving a 1010 code will convert this into an
analogue signal of amplitude 25 mv only. Thus the process' of quantization leads to
an approximation of the input signal with the detected signal having some deviations
in amplitude from the actual values. This deviation between the amplitude of
samples at the transmitter and receiving ends (i.e. the difference between the actual
value & the reconstructed value) gives rise to quantization distortion.
6.7.2 If V represent the step size and 'e' represents the difference in
amplitude fe' must exists between - V/2 & + V/2) between the actual signal level and
its quantized equivalent then it can be proved that mean square quantizing error is
equal to (V2). Thus, we see that the error depends upon the size of the step. 12
6.7.3 In linear quantization, equal step means equal degree of error for all
input amplitudes. In other words, the signal to noise ratio for weaker signals will be
poorer.
6.7.4 To reduce error, we, therefore, need to reduce step size or in other
words, increase th,e number of steps in the given amplitude range. This would
however, increase the transmission bandwidth because bandwidth B = fm log
L. where L is the number of quantum steps and fm is the highest signal frequency.
But as we knows from speech statistics that the probability of occurrence of a small
amplitude is much greater than large one, it seems appropriate to provide more
quantum levels (V = low value) in the small amplitude region and only a few (V =
high value) in the region of higher amplitudes. In this case, provided the total number
of specified levels remains unchanged, no increase in transmission bandwidth will
be required. This will also try to bring about uniformity in signal to noise ratio at all
BRBRAITT, Jabalpur, issued on Jan.2006 43
Fundamental of Transmission Sec. 3.1
levels of input signal. This type of
quantization is called non-uniform quantization.
6.7.5 In practice, non-uniform quantization is achieved using segmented
quantization (also called companding). This is shown in Fig. 9 (a). In fact, there are
equal number of segments for both positive and negative excursions. In order to
specify the location of a sample value it is necessary to know the following :
1.The sign of the sample (positive or negative excursion)
2.The segment number
3.The quantum level within the segment
As seen in Fig. 9 (b), the first two segment in each polarity are collinear, (i.e. the
slope is the same in the central region) they are considered as one segment. Thus
the total number of segment appear to be 13. However, for purpose of analysis all
the 16 segments will be taken into account.
7.0 ENCODING
BRBRAITT, Jabalpur, issued on Jan.2006 44
Fundamental of Transmission Sec. 3.1
7.1 Conversion of quantised analogue levels to binary signal is called encoding. To
represent 256 steps, 8 level code is required. The eight bit code is also called an
eight bit "word".
The 8 bit word appears in the form
P ABC WXYZ
Polarity bit ‘1’ Segment Code Linear encoding
for + ve 'O' for - ve. in the segment
The first bit gives the sign of the voltage to be coded. Next 3 bits gives the segment
number. There are 8 segments for the positive voltages and 8 for negative
voltages. Last 4 bits give the position in the segment. Each segment contains
16 positions.
Referring to Fig. 9(b), voltage Vc will be encoded as 1 1 1 1 0101.
FIG. 9 (b) : ENCODING CURVE WITH COMPRESSION 8 BIT CODE
BRBRAITT, Jabalpur, issued on Jan.2006 45
Fundamental of Transmission Sec. 3.1
7.2 The quantization and encoding are done by a circuit called coder. The coder
converts PAM signals (i.e. after sampling) into a 8 bit binary signal. The coding is
done as per Fig. 9 which shows a relationship between voltage V to be coded and
equivalent binary number N. The function N = f(v) is not linear.
The curve has the following characteristics.
It is symmetrical about the origins. Zero level corresponds to zero voltage to be
encoded.
It is logarithmatic function approximated by 13 straight segments numbered 0 to 7
in positive direction and 'O' to 7 in the negative direction. However 4 segments 0, 1,
0, 1 lying between levels + vm/64 -vm/64 being colinear are taken as one segment.
The voltage to be encoded corresponding to 2 ends of successive segments are in
the ratio of 2. That is vm, vm/2, vm/4, vm/8, vm/16, vm/32, vm/64, vm/128 (vm being
the maximum voltage).
There are 128 quantification levels in the positive part of the curve and 128 in the
negative part of the curve.
7.3 In a PCM system the channels are sampled one by one by applying the sampling
pulsqs to the sampling gates. Refer Fig. 10. The gates open only when a pulse is
applied to them and pass the analogue signals through them for the duration for
which the gates remain open. Since only one gate will be activated at a given instant,
a common encoding circuit is used for all channels. Here the samples are quantized
and encoded. The encoded samples of all the channels and signals etc are combined
in the digital combiner and transmitted.
BRBRAITT, Jabalpur, issued on Jan.2006 46
Fundamental of Transmission Sec. 3.1
7.4 The reverse process is carried out at the receiving end to retreive the original
analogue signals. The digital combiner combines the encoded samples in the form of
"frames". The digital separator decombines the incoming digital streams into
individual frames. These frames are decoded to give the PAM (Pulse Amplitude
Modulated) samples. The samples corresponding to individual channels are
separated by operating the receive sample gates in the same sequence i.e. in
synchronism with the transmit sample gates.
BRBRAITT, Jabalpur, issued on Jan.2006 47
Fundamental of Transmission Sec. 3.1
8.0 CONCEPT OF FRAME
8.1 In Fig. 10, the sampling pulse has a repetition rate of Ts sees and a pulse
width of "St". When a sampling pulse arrives, the sampling gate remains opened
during the time "St" and remains closed till the next pulse arrives. It means that a
channel is activated for the duration "St". This duration, which is the width of the
sampling puse, is called the "time slot" for a given channel.
8.2. Since Ts is much larger as compared to St. a number of channels can be
sampled each for a duration of St within the time Ts. With reference to Fig. 10, the first
sample of the first channel is taken by pulse 'a', encoded and is passed on the
combiner. Then the first sample of the second channel is taken by pulse 'b' which is
also encoded and passed on to the combiner, Likewise the remaining channels are
also sampled sequentially and are encoded before being fed to the combiner. After
the first sample of the Nth channel is taken and processed, the second sample of the
first channel is taken, this process is repeated for all channels. One full set of
samples for all channel taken within the duration Ts is called a "frame". Thus the set
of all first samples of all channels is one frame; the set of all second samples is
another frame and so on.
8.3 As already said in para 5.3.5, Ts in a 30 channel PCM system is 125
microseconds and the signalling information of all the channels is transmitted
through a separate time slot. To maintain synchronization between transmit and
receive ends, the synchronization data is transmitted through another time slot.
Thus for a 30 chl PCM system, we have 32 time slots.
Thus the time available per channel would be 3.9 microsecs.
Thus for a 30 chl PCM system,
Frame = 125 microseconds
Time slot per chl = 3.9 microseconds.
8.4 Structure of Frame
8.4.1 A frame of 125 microseconds duration has 32 time slots. These slots are
numbered Ts 0 to Ts 31.
BRBRAITT, Jabalpur, issued on Jan.2006 48
Fundamental of Transmission Sec. 3.1
Information for providing synchronization between trans and receive ends is passed
through a separate time slot. Usually the slot Ts 0 caries the synchronizsation
signals. This slot is also called Frame alignment word (FAW).
The signalling informatiori is transmitted through time slot Ts 16.
Ts 1 to Ts 15 are utilized for voltage signal of channels 1 to 15 respectively.
Ts 17 to Ts 31 are utilized for voltage signal of channels 16 to 30 respectively.
9.0 SYNCHRONIZATION
9.1 The output of a PCM terminal will be a continuous stream of bits. At
the receiving end, the receiver has to receive the incoming stream of bits and
discriminate between frames and separate channels from these. That is, the
receiver has to recognise the start of each frame correctly. This operation is
called frame alignment or Synchronization and is achieved by inserting a fixed
digital pattern called a "Frame Alignment Word (FAW)" into the transmitted bit
stream at regular intervals. The receiver looks for FAW and once it is detected,
it knows that in next time slot, information for channel one will be there and so on.
9.2 The digits or bits of FAW occupy seven out of eight bits of Ts 0 in
the following pattern.
Bit position of Ts 0 B1 B2 B3 B4 B5 B6 B7 B8
FAW digit value X 0 0 1 1 0 1 1
9.3 The bit position B1 can be either ' 1 ' or '0'. However, when the PCM
system is to be linked to an international network, the B1 position is fixed at '1 ' .
The FAW is transmitted in the Ts O of every alternate frame.
Frame which do not contain the FAW, are used for transmitting supervisory
and alarm signals.
To distinguish the Ts 0 of frame carrying supervisory/alarm signals from those
carrying the FAW, the B2 bit position of the former are fixed at T. The FAW and
alarm signals are transmitted alternatively as shown in Table - 2.
TA B L E - 2
BRBRAITT, Jabalpur, issued on Jan.2006 49
Fundamental of Transmission Sec. 3.1
Frame Remark
Numbers B1 B2 B3 B4 B5 B6 B7 B8
FO X 0 0 1 1 0 1 1 FAW
F1 X 1 Y Y Y 1 1 1 ALARM
F2 X 0 0 1 1 0 1 1 FAW
F3 etc X 1 Y Y Y 1 1 1 ALARM
In frames 1, 3, 5, etc, the bits B3, B4, B5 denote various types of alarms. For
example, in B3 position, if Y = 1, it indicate Frame synchronisation alarm. If Y = 1 in
B4, it indicates high error density alarm. When there is no alarm condition, bits
B3 B4 B5 are set 0. An urgent alarm is indicated by transmitting "all ones".
The code word for an urgent alarm would be of the form.
X 111 1111
10.0 SIGNALLING IN PGM SYSTEMS
10.1 In a telephone network,-the signalling information is used for proper routing of a
call between two subscribers, for providing certain status information like dial
tone, busy tone, ring back. NU tone, metering pulses, trunk offering signal etc.
All these functions are grouped under the general terms "signalling" in PCM
systems. The signaling information can be transmitted in the form of DC pulses
(as in step by step exchange) or multifrequency pulses (as in cross bar systems)
etc.
10.2 The signalling pulses retain their amplitude for a much longer period than the
pulses carrying speech information. It means that the signalling information
is a slow varying signal in time compared to the speech signal which is fast
changing in the time domain. Therefore, a signalling channel can be digitized with
less number of bits than a voice channel.
10.3 In a 30 chl PCM system, time slot Ts 16 in each frame is allocated for carrying
signalling information.
10.4 The time slot 16 of each frame carries the signalling data
corresponding to two VF channels only. Therefore, to cater for 30 channels,
we must transmit 15 frames, each having 125 microseconds duration. For
carrying synchronization data for all frames, one additional frame is used.
Thus a group of 16 frames (each of 125 microseconds) is formed to make a
"multiframe". The duration of a multiframe is 2 milliseconds. The multiframe has
BRBRAITT, Jabalpur, issued on Jan.2006 50
Fundamental of Transmission Sec. 3.1
16 major time slots of 125 microseconds duration. Each of these (slots) frames
has 32 time slots carrying, the encoded samples of all channels plus the signaling
and synchronization data. Each sample has eight bits of duration 0.400
microseconds (3.9/8 = 0.488) each. The relationship between the bit duration
frame and multiframe is illustrated in Fig. 11 (a) & 11 (b).
BRBRAITT, Jabalpur, issued on Jan.2006 51
Fundamental of Transmission Sec. 3.1
FIG. 11 (B) 2.048 Mb/s PCM MULTIFRAME
10.4 We have 32 time slots in a frame, each slot carries an 8 bit word.
The total number of bits per frame = 32 x 8 = 256
The total number of frames per seconds is 8000
The total number of bits per second are 256 x 8000 = 2048 K/bits.
Thus, a 30 chP PCM system has 2048 K bits.
10.6 Multiframe Structure
10.6.1 In the time slot 16 of FO, the first four bits (positions 1 to 4) contain the
multiframe alignment signal which enables the receiver to identify a multiframe.
The other four bits (no. 5 to 8) are spare. These may be used for carrying alarm
signals.
Time slots 16 of frames F1 to FT5 are used for carrying the signalling information.
Each frame carries signalling, data for two VF channels. For instance, time slot Ts 16
of frame F1 carries the signal data for VF channel 1 in the first four bits. The next four
bits are used for carrying signalling information
for channel 16. Similarly, time slot Ts16 of F2 carries signalling data of chls 2 .and 17.
BRBRAITT, Jabalpur, issued on Jan.2006 52
Fundamental of Transmission Sec. 3.1
Thus in multiframe structure, four signalling bits are provided for each VF channels.
As each multiframe includes 16 frames, each with a sacnqtoq -
per sec.,.the.signalling of each channel will occur at a rate of 500 per sec.
BRBRAITT, Jabalpur, issued on Jan.2006 53
S-ar putea să vă placă și
- LOGARITHMIC UNITS FOR AUDIO AND BROADCAST POWER MEASUREMENTSDocument9 paginiLOGARITHMIC UNITS FOR AUDIO AND BROADCAST POWER MEASUREMENTSCarlos Torrez BaltazarÎncă nu există evaluări
- ICS 3103 Lecture 2Document49 paginiICS 3103 Lecture 2Sakawa BobÎncă nu există evaluări
- DB Operations2017Document16 paginiDB Operations2017Anonymous 0Uc0GgkÎncă nu există evaluări
- Introduction to Electronic Communications SystemsDocument56 paginiIntroduction to Electronic Communications SystemsJunel Bravo PradoÎncă nu există evaluări
- Introduction To Electronic Communications System: Main PurposeDocument65 paginiIntroduction To Electronic Communications System: Main PurposeMiguel VillarroelÎncă nu există evaluări
- Application Note No. 7: The DecibelDocument10 paginiApplication Note No. 7: The DecibelMarvin SinuesÎncă nu există evaluări
- Learning Basics of DecibelsDocument7 paginiLearning Basics of DecibelsRajuraji100% (1)
- Solution Tutorial # 1 (Intro)Document20 paginiSolution Tutorial # 1 (Intro)azieÎncă nu există evaluări
- Chapter 1 Decibel Lecture 2Document15 paginiChapter 1 Decibel Lecture 2Nur AfiqahÎncă nu există evaluări
- Assignment 1 SolutionDocument6 paginiAssignment 1 SolutionAbdullah NaeemÎncă nu există evaluări
- CWNA Chapter3Document45 paginiCWNA Chapter3SerÎncă nu există evaluări
- dB or Not dB? - Understanding Decibel NotationDocument7 paginidB or Not dB? - Understanding Decibel NotationbudituxÎncă nu există evaluări
- Untitled 123Document16 paginiUntitled 123Cedric BernardÎncă nu există evaluări
- RF Power Values 017-DFDocument6 paginiRF Power Values 017-DFjanmejoydasÎncă nu există evaluări
- Noise CalculationDocument21 paginiNoise CalculationSurya Prakash PandeyÎncă nu există evaluări
- Gain and signal processing circuitsDocument17 paginiGain and signal processing circuitssaleh almutawaÎncă nu există evaluări
- WCDMA Coverage Estimation TechniquesDocument31 paginiWCDMA Coverage Estimation TechniquesMuhammad JunaidÎncă nu există evaluări
- 05 DB MathDocument23 pagini05 DB MathKopano Malombo100% (1)
- Decibel Notes (Highlighted)Document8 paginiDecibel Notes (Highlighted)Lara Jane ReyesÎncă nu există evaluări
- Understanding Decibels with Simple ExamplesDocument4 paginiUnderstanding Decibels with Simple ExamplesMarcos Lopez HernandezÎncă nu există evaluări
- NU DB and NOISE CALCULATION PDFDocument49 paginiNU DB and NOISE CALCULATION PDFChristelle Cha LotaÎncă nu există evaluări
- Ch2 Sig 12g PDFDocument35 paginiCh2 Sig 12g PDFAnkit palÎncă nu există evaluări
- Unit of Measure - DB, DBD, DBi, DBM, DBW and DBMVDocument8 paginiUnit of Measure - DB, DBD, DBi, DBM, DBW and DBMVnad_chadi8816Încă nu există evaluări
- Chapter 1Document48 paginiChapter 1Maria Kayla PinedaÎncă nu există evaluări
- Crossbow 07Document3 paginiCrossbow 07Prossy NatuhweraÎncă nu există evaluări
- Introduction to Communication SystemsDocument11 paginiIntroduction to Communication SystemsmarwanÎncă nu există evaluări
- CNET304 - Wireless Technology: RF Signal PowerDocument31 paginiCNET304 - Wireless Technology: RF Signal PowerNehal GuptaÎncă nu există evaluări
- Chapter 26Document68 paginiChapter 26NO ONEÎncă nu există evaluări
- Module 2 - DecibelsDocument7 paginiModule 2 - DecibelsAira Mae CrespoÎncă nu există evaluări
- كم عندنا سعود؟Document27 paginiكم عندنا سعود؟saleh almutawaÎncă nu există evaluări
- Info Lecture1 Fall 2023Document37 paginiInfo Lecture1 Fall 2023minamagdy12321Încă nu există evaluări
- UGRD-ECE6207 Principles of Communication Systems: (Prelim Exam)Document13 paginiUGRD-ECE6207 Principles of Communication Systems: (Prelim Exam)Jitlee PapaÎncă nu există evaluări
- Log Units and ApplicationsDocument29 paginiLog Units and ApplicationsShailly KhannaÎncă nu există evaluări
- Electronics Guide to Decibels and Power RatiosDocument4 paginiElectronics Guide to Decibels and Power RatiosTất ThắngÎncă nu există evaluări
- Electronics 3 Checkbook: The Checkbooks SeriesDe la EverandElectronics 3 Checkbook: The Checkbooks SeriesEvaluare: 5 din 5 stele5/5 (1)
- Radio Network Architecture dB Concept Antenna TypesDocument5 paginiRadio Network Architecture dB Concept Antenna TypesVivek Bhushan SinghÎncă nu există evaluări
- Assignment 1Document6 paginiAssignment 1Abdullah NaeemÎncă nu există evaluări
- ch1 - Part 2Document13 paginich1 - Part 2Vivvian Grace M MolahidÎncă nu există evaluări
- Appendix 2a - Decibels and Signal StrengthDocument2 paginiAppendix 2a - Decibels and Signal Strengthabdi warfaa100% (1)
- EE 315 Module 2Document11 paginiEE 315 Module 2Kevin Cortez100% (1)
- OFTS Prob 2014 PDFDocument38 paginiOFTS Prob 2014 PDFNenad Mitrovic0% (1)
- Decibel and NoiseDocument2 paginiDecibel and NoisetsikboyÎncă nu există evaluări
- RF MathDocument22 paginiRF Mathprosenjeet_singhÎncă nu există evaluări
- Clock Recovery, Probability of Error and Bite Error RateDocument31 paginiClock Recovery, Probability of Error and Bite Error RateMary Chlouie Justiniani PadiosÎncă nu există evaluări
- T3-Physical LayerDocument95 paginiT3-Physical Layerutkarsh.shrivastav202002Încă nu există evaluări
- RF BasicsDocument51 paginiRF BasicsIrshad HaqÎncă nu există evaluări
- DB Operations and NoiseDocument79 paginiDB Operations and NoisePatrick BelenÎncă nu există evaluări
- Lec 1Document35 paginiLec 1os2012004Încă nu există evaluări
- Trainsimmision ImpairmentsDocument16 paginiTrainsimmision Impairments219x1a05e7Încă nu există evaluări
- Passive Intermodulation (PIM) in In-Building Distributed Antenna Systems (DAS)Document10 paginiPassive Intermodulation (PIM) in In-Building Distributed Antenna Systems (DAS)JorgeÎncă nu există evaluări
- Wireless Technology Questions1 - AnswerDocument11 paginiWireless Technology Questions1 - Answerapi-26355935100% (11)
- FWL Lab 3 2 3 enDocument6 paginiFWL Lab 3 2 3 enKarla Berenice Aldrete BÎncă nu există evaluări
- Downlink and uplink frequency bands of wireless systemsDocument6 paginiDownlink and uplink frequency bands of wireless systemsArun UpadhyayaÎncă nu există evaluări
- Understanding Logarithmic Units and Decibel CalculationsDocument9 paginiUnderstanding Logarithmic Units and Decibel CalculationsKamal SinghÎncă nu există evaluări
- Revisiting Amplifier Basics and Multistage AmplifiersDocument55 paginiRevisiting Amplifier Basics and Multistage AmplifiersSowndaryaÎncă nu există evaluări
- Lec-7Document21 paginiLec-7rr1974aaÎncă nu există evaluări
- RF FundamentalsDocument164 paginiRF Fundamentalsmaheswaran-nct100% (2)
- 03 Transmisi-2Document55 pagini03 Transmisi-2Mudliul WahdaniyahÎncă nu există evaluări
- Easy(er) Electrical Principles for General Class Ham License (2015-2019)De la EverandEasy(er) Electrical Principles for General Class Ham License (2015-2019)Evaluare: 5 din 5 stele5/5 (1)
- Easy(er) Electrical Principles for General Class Ham License (2019-2023)De la EverandEasy(er) Electrical Principles for General Class Ham License (2019-2023)Încă nu există evaluări
- Ccna InterviewDocument29 paginiCcna Interviewvijaysingh100% (6)
- Handbook On Good Building Design and ConstructionDocument100 paginiHandbook On Good Building Design and Constructionmujati100% (3)
- V5 EwsdDocument79 paginiV5 Ewsdneeraj kumar singh100% (3)
- Transmission PlanDocument17 paginiTransmission Planneeraj kumar singhÎncă nu există evaluări
- Ocb CSNDocument118 paginiOcb CSNneeraj kumar singh100% (1)
- SDHDocument47 paginiSDHneeraj kumar singhÎncă nu există evaluări
- OfcDocument58 paginiOfcneeraj kumar singh100% (1)
- Voip TechnologyDocument64 paginiVoip TechnologySherry HenryÎncă nu există evaluări
- Ug CablesDocument183 paginiUg Cablesneeraj kumar singhÎncă nu există evaluări
- TrafficDocument31 paginiTrafficneeraj kumar singhÎncă nu există evaluări
- Ocb DataDocument102 paginiOcb Dataneeraj kumar singh100% (3)
- Ocb 283 AppDocument180 paginiOcb 283 Appneeraj kumar singh100% (5)
- System Panel1Document30 paginiSystem Panel1neeraj kumar singhÎncă nu există evaluări
- Ocb LoadDocument74 paginiOcb Loadneeraj kumar singh100% (2)
- PCMDocument54 paginiPCMneeraj kumar singhÎncă nu există evaluări
- NNP 2003Document124 paginiNNP 2003neeraj kumar singhÎncă nu există evaluări
- Mtce PhilosphyDocument5 paginiMtce Philosphyneeraj kumar singhÎncă nu există evaluări
- OcbDocument95 paginiOcbneeraj kumar singh100% (2)
- MWDocument46 paginiMWneeraj kumar singhÎncă nu există evaluări
- IsdnDocument9 paginiIsdnneeraj kumar singhÎncă nu există evaluări
- IVRSDocument18 paginiIVRSneeraj kumar singhÎncă nu există evaluări
- Mntce PhilosDocument15 paginiMntce Philosneeraj kumar singhÎncă nu există evaluări
- InternetDocument351 paginiInternetneeraj kumar singhÎncă nu există evaluări
- LTGDocument51 paginiLTGneeraj kumar singhÎncă nu există evaluări
- FeeDocument38 paginiFeeneeraj kumar singhÎncă nu există evaluări
- Signalling in TelecommunicationDocument54 paginiSignalling in TelecommunicationBiju NarayananÎncă nu există evaluări
- In Arch& ServicesDocument16 paginiIn Arch& Servicesneeraj kumar singhÎncă nu există evaluări
- FeexchDocument114 paginiFeexchneeraj kumar singhÎncă nu există evaluări
- Dlu V13Document102 paginiDlu V13neeraj kumar singh100% (1)
- EWSD FeaturesDocument11 paginiEWSD Featuresneeraj kumar singhÎncă nu există evaluări
- Sony CD Player User Manual DEJ106CK PDFDocument2 paginiSony CD Player User Manual DEJ106CK PDFNusret YılmazÎncă nu există evaluări
- Objective Questions With AnswersDocument23 paginiObjective Questions With AnswersSidharth MalhotraÎncă nu există evaluări
- Physics MCQ Solid State PhysicsDocument15 paginiPhysics MCQ Solid State PhysicsRams Chander88% (25)
- DHGFG 8200a e PDFDocument2 paginiDHGFG 8200a e PDFLuis Armando Reyes CardosoÎncă nu există evaluări
- RDSO approved vendor list for railway signalling and telecom itemsDocument183 paginiRDSO approved vendor list for railway signalling and telecom itemsEleswarapu VijayaÎncă nu există evaluări
- Engineering Mathematics GateDocument2 paginiEngineering Mathematics GatepragyananoÎncă nu există evaluări
- Bc847series Bc848series Bc849series Bc850seriesDocument13 paginiBc847series Bc848series Bc849series Bc850seriesasd1123Încă nu există evaluări
- Star Online Publication: Case Number: Release Date: Symptom/Vehicle IssueDocument2 paginiStar Online Publication: Case Number: Release Date: Symptom/Vehicle IssueThomas AndersonÎncă nu există evaluări
- Resume LayoutDocument10 paginiResume LayoutvijaykannamallaÎncă nu există evaluări
- Dse7420 - Manual Instalacion RapidaDocument32 paginiDse7420 - Manual Instalacion RapidaImplementación OLCÎncă nu există evaluări
- LST EnodebalgoswitchDocument9 paginiLST EnodebalgoswitchPuujeeÎncă nu există evaluări
- Panasonic Home Theater SystemDocument48 paginiPanasonic Home Theater SystemspyroszafÎncă nu există evaluări
- Counters of Traffic Category MeasurementDocument30 paginiCounters of Traffic Category Measurement3061168Încă nu există evaluări
- Tutorial Optical Transmission Systems Peter J WinzerDocument155 paginiTutorial Optical Transmission Systems Peter J WinzerraduldelÎncă nu există evaluări
- Z Commands BSC 3iDocument15 paginiZ Commands BSC 3iGauravSwami100% (1)
- Midterm Exam ReviewDocument18 paginiMidterm Exam Reviewdun lelÎncă nu există evaluări
- Maintaining Electrical SystemsDocument32 paginiMaintaining Electrical Systemsdinie90100% (2)
- HiokiDocument8 paginiHiokibajarlibroselectroÎncă nu există evaluări
- APW5 ManualDocument9 paginiAPW5 ManualWaldo TrepianaÎncă nu există evaluări
- Frequency Domain Image Processing TechniquesDocument79 paginiFrequency Domain Image Processing TechniquesSarim JawadÎncă nu există evaluări
- Panasonic Th-42-50px20u Th-37-42pa20u CH Gp6d Training Manual (ET)Document70 paginiPanasonic Th-42-50px20u Th-37-42pa20u CH Gp6d Training Manual (ET)bombaa777Încă nu există evaluări
- The Puma 500Document3 paginiThe Puma 500Elsa VelazquezÎncă nu există evaluări
- LED T8 DirectFit Lamp Spec SheetDocument6 paginiLED T8 DirectFit Lamp Spec SheetSergioÎncă nu există evaluări
- DYP-ME007TX Ultrasonic Sensor Arduino Library Compatible Serial Output ModuleDocument2 paginiDYP-ME007TX Ultrasonic Sensor Arduino Library Compatible Serial Output Modulevenikiran100% (1)
- A 130.7-mm 2-Layer 32-Gb ReRAM Memory Device in 24-nm Technology PDFDocument14 paginiA 130.7-mm 2-Layer 32-Gb ReRAM Memory Device in 24-nm Technology PDFlinÎncă nu există evaluări
- Automatic Temperature Controller Using Lm35Document18 paginiAutomatic Temperature Controller Using Lm35siddhantgurung4171% (14)
- Manual FallosDocument52 paginiManual FallosAndres Rojas100% (2)
- Sfere Dts1946-t Energy MeterDocument5 paginiSfere Dts1946-t Energy Metersujingthet50% (2)
- User Tutorial For Aqua Sim 10 26Document10 paginiUser Tutorial For Aqua Sim 10 26Aziz Ur RehmanÎncă nu există evaluări
- Honeywell Price List Jan 2022 PDFDocument76 paginiHoneywell Price List Jan 2022 PDFSergey BashtoviyÎncă nu există evaluări