S-ar putea să vă placă și
- AT19643-VD Unit-II To Unit-V NotesDocument60 paginiAT19643-VD Unit-II To Unit-V NotesEdwinJoseph RÎncă nu există evaluări
- VD Exp-8 Q2Document3 paginiVD Exp-8 Q2UMESH HARCHANDANIÎncă nu există evaluări
- Lecture # 3VDDocument37 paginiLecture # 3VDMustafaÎncă nu există evaluări
- AU 304 Vehicle DynamicsDocument95 paginiAU 304 Vehicle DynamicsAli Abdullah Khan100% (1)
- Vehicle DynamicsDocument29 paginiVehicle DynamicshaftommmmÎncă nu există evaluări
- The Stability and Control of MotorcyclesDocument14 paginiThe Stability and Control of Motorcyclesyunde shiÎncă nu există evaluări
- Computer Based Wireless Automobile Wheel Alignment System Using AccelerometerDocument8 paginiComputer Based Wireless Automobile Wheel Alignment System Using AccelerometertheijesÎncă nu există evaluări
- Ride ModellingDocument115 paginiRide ModellingPranav RaveendranÎncă nu există evaluări
- Vehicle Dynamics TopicsDocument24 paginiVehicle Dynamics TopicstareefalhashashÎncă nu există evaluări
- Unit 3 Dynnamic HevDocument38 paginiUnit 3 Dynnamic HevsavitaÎncă nu există evaluări
- Vehicle Vibration and Ride 1Document11 paginiVehicle Vibration and Ride 1canup1990Încă nu există evaluări
- Handling CharacteristicsDocument15 paginiHandling CharacteristicsSaket NihalÎncă nu există evaluări
- CH 3 SuspensionDocument85 paginiCH 3 Suspensiondagem aragawÎncă nu există evaluări
- Chapter 1Document29 paginiChapter 1Arkew BogaleÎncă nu există evaluări
- Parametric Analysis of Four Wheel Vehicle Using Adams/Car: Jadav Chetan S. Patel Priyal RDocument6 paginiParametric Analysis of Four Wheel Vehicle Using Adams/Car: Jadav Chetan S. Patel Priyal RInternational Journal of computational Engineering research (IJCER)Încă nu există evaluări
- Vehicle Dynamics With Independent 4WSDocument20 paginiVehicle Dynamics With Independent 4WSAl LGÎncă nu există evaluări
- Asae S296 PDFDocument3 paginiAsae S296 PDFJavier Gaete Obreque100% (2)
- Unit 2Document37 paginiUnit 2EdwinJoseph RÎncă nu există evaluări
- Vehicle Responses To Cornering: The Wheel While CorneringDocument22 paginiVehicle Responses To Cornering: The Wheel While CorneringNemish KanwarÎncă nu există evaluări
- Chapter ThreeDocument167 paginiChapter Threetadiwos100% (1)
- Tyre Report SampleDocument5 paginiTyre Report SampleArka PatraÎncă nu există evaluări
- Digital Assignment - 1: Name: Shaik Naveed REG NO:20BMA0032 Subject: Automotive ChassisDocument8 paginiDigital Assignment - 1: Name: Shaik Naveed REG NO:20BMA0032 Subject: Automotive ChassisNaveed kingÎncă nu există evaluări
- Theory Definition of Suspension Derivatives: Camber Angle, (Deg)Document70 paginiTheory Definition of Suspension Derivatives: Camber Angle, (Deg)Danilo RojasÎncă nu există evaluări
- 00-Temari 01 - 18 PDFDocument232 pagini00-Temari 01 - 18 PDFJordi_fgÎncă nu există evaluări
- Tractor Wheel Trends and Traction TerminologyDocument16 paginiTractor Wheel Trends and Traction TerminologyRoyal. .AtheistÎncă nu există evaluări
- CH-4 - Part2Document41 paginiCH-4 - Part2Just DearÎncă nu există evaluări
- Camber AngleDocument8 paginiCamber AngleMohamadTalatÎncă nu există evaluări
- BMA4723 Vehicle DynamicsDocument327 paginiBMA4723 Vehicle DynamicsFu Hong100% (3)
- What We Are Going To UseDocument8 paginiWhat We Are Going To UseSukhmandeep SinghÎncă nu există evaluări
- Why Vehicle Slip When It Is Travelling On A SlopeDocument12 paginiWhy Vehicle Slip When It Is Travelling On A SlopeRizwan Sheikh0% (1)
- Traction and Lateral ForceDocument16 paginiTraction and Lateral Forcemu_rajesh3415Încă nu există evaluări
- The Following Forces Act On Vehicle in MotionDocument2 paginiThe Following Forces Act On Vehicle in Motionsou.beraÎncă nu există evaluări
- SuspensionDocument159 paginiSuspensionMubarek TeshomeÎncă nu există evaluări
- Chapter-Six: Suspension SystemDocument160 paginiChapter-Six: Suspension SystemMikias BelaynehÎncă nu există evaluări
- Vehicle Dynamics NotesDocument116 paginiVehicle Dynamics NotesJagadesh AbbuÎncă nu există evaluări
- CHAPTER-3 Suspension SystemDocument159 paginiCHAPTER-3 Suspension SystemEssa YimerÎncă nu există evaluări
- Nikhil PawarDocument16 paginiNikhil PawarNikhil PawarÎncă nu există evaluări
- Suspension SystemDocument72 paginiSuspension SystemMubarek TeshomeÎncă nu există evaluări
- Steering Geometry AnglesDocument12 paginiSteering Geometry AnglesMohit RanaÎncă nu există evaluări
- Steering DesignDocument6 paginiSteering DesignAsif HussainÎncă nu există evaluări
- Final Suspension DesignDocument60 paginiFinal Suspension DesignSNEHASIS MOHANTY100% (1)
- Automobile Suspension Detailed Analysis PDFDocument19 paginiAutomobile Suspension Detailed Analysis PDFalpÎncă nu există evaluări
- Chapter-Three: Suspension SystemDocument86 paginiChapter-Three: Suspension SystemMarew GetieÎncă nu există evaluări
- Solutions To Forces Worksheet 1 PhysicsDocument11 paginiSolutions To Forces Worksheet 1 PhysicsLixÎncă nu există evaluări
- Derailment MechanismDocument39 paginiDerailment Mechanismkr_abhijeet72356587100% (2)
- Preda Ion L1Document11 paginiPreda Ion L1Ramadan DurakuÎncă nu există evaluări
- Chapter-3 PTD NewDocument26 paginiChapter-3 PTD NewGODÎncă nu există evaluări
- Bma4723 Vehicle Dynamics Chap 4Document66 paginiBma4723 Vehicle Dynamics Chap 4Fu HongÎncă nu există evaluări
- Chapter 6 Tire BehaviorDocument12 paginiChapter 6 Tire BehaviorroramohÎncă nu există evaluări
- Chasis Lifan 620Document56 paginiChasis Lifan 620lllleonellllÎncă nu există evaluări
- Rolling FrictionDocument11 paginiRolling FrictionsukujeÎncă nu există evaluări
- Understanding The Influence of Pressure and Radial Loads On Stress and Displacement Response of A Rotating Body: The Automobile WheelDocument9 paginiUnderstanding The Influence of Pressure and Radial Loads On Stress and Displacement Response of A Rotating Body: The Automobile WheelxxxtoyaxxxÎncă nu există evaluări
- Recent Advances in Antilock Braking Systems and Traction Control SystemsDocument15 paginiRecent Advances in Antilock Braking Systems and Traction Control Systemsdavid_luzÎncă nu există evaluări
- Week 3Document42 paginiWeek 3halil yıldırımÎncă nu există evaluări
- Suspension: 1) Wheelbase and TrackwidthDocument8 paginiSuspension: 1) Wheelbase and TrackwidthRaneem khaledÎncă nu există evaluări
- Handle Bar Vibration MmotorcycleDocument12 paginiHandle Bar Vibration MmotorcycleabhijitÎncă nu există evaluări
- Unit - IVDocument54 paginiUnit - IVsiva kumarÎncă nu există evaluări
- Suspension Analysis PDFDocument5 paginiSuspension Analysis PDFramsaiÎncă nu există evaluări
- Basics of Numbering SystemsDocument9 paginiBasics of Numbering SystemsSeyton123Încă nu există evaluări
- 2014 REA DMO Project Management GuideDocument12 pagini2014 REA DMO Project Management GuideSeyton123Încă nu există evaluări
- MEM16006ADocument4 paginiMEM16006ASeyton123Încă nu există evaluări
- About Downloads PDFDocument1 paginăAbout Downloads PDFstaticbitezÎncă nu există evaluări
- 2014 General Information v1.0 Web Booklet Version1Document20 pagini2014 General Information v1.0 Web Booklet Version1Seyton123Încă nu există evaluări
- Marking Criteria 2014 v1.0Document16 paginiMarking Criteria 2014 v1.0Seyton123Încă nu există evaluări
- ) Rupxod6$ (5Dflqj&Du ( (Shulphqwdodqg1Xphulfdo$Qdo/Vlvri WKH ( (Whuqdo$Hurg/QdplfvDocument17 pagini) Rupxod6$ (5Dflqj&Du ( (Shulphqwdodqg1Xphulfdo$Qdo/Vlvri WKH ( (Whuqdo$Hurg/QdplfvSeyton123Încă nu există evaluări
- DocumentationDocument829 paginiDocumentationSeyton123Încă nu există evaluări
- Design ProcessDocument1 paginăDesign ProcessSeyton123Încă nu există evaluări
- General Information BookletDocument20 paginiGeneral Information BookletSeyton123Încă nu există evaluări
- Introduction - To - Autodesk - Flow - Design - F1 - in - Schools - Print - Version - R1A PDFDocument14 paginiIntroduction - To - Autodesk - Flow - Design - F1 - in - Schools - Print - Version - R1A PDFRohit Kumar SinghÎncă nu există evaluări
- F1 Schools 2013-14 Teachers GuideDocument12 paginiF1 Schools 2013-14 Teachers GuideSeyton123Încă nu există evaluări
- Autodesk Showcase F1Document15 paginiAutodesk Showcase F1WunNaÎncă nu există evaluări
- General Information BookletDocument20 paginiGeneral Information BookletSeyton123Încă nu există evaluări
- SAP 4.6 Basic Skills Self-Study (MIT) PDFDocument152 paginiSAP 4.6 Basic Skills Self-Study (MIT) PDFEliezer Alvarez LaresÎncă nu există evaluări
- BVG Capital ExpenditureDocument15 paginiBVG Capital ExpenditureSeyton123Încă nu există evaluări
- Business CaseDocument17 paginiBusiness CaseHerianto HuangÎncă nu există evaluări
- Marking Criteria 2014 v1.0Document16 paginiMarking Criteria 2014 v1.0Seyton123Încă nu există evaluări
- F1 Schools 2013-14 Teachers GuideDocument12 paginiF1 Schools 2013-14 Teachers GuideSeyton123Încă nu există evaluări
- GE Six SigmaDocument6 paginiGE Six Sigmaimran27pk100% (2)
- Read MeDocument11 paginiRead Mekan_2014Încă nu există evaluări
- FileAssoc Params DeleteItDocument2 paginiFileAssoc Params DeleteItEdson BlueÎncă nu există evaluări
- FileAssoc Params DeleteItDocument2 paginiFileAssoc Params DeleteItEdson BlueÎncă nu există evaluări
- Steam EngineerDocument7 paginiSteam EngineerhgkgkjgkjhghÎncă nu există evaluări
- MEM30007A DescriptorDocument5 paginiMEM30007A DescriptorSeyton123Încă nu există evaluări
- User PathDocument2 paginiUser PathSeyton123Încă nu există evaluări
- Wind Tunnel Revitalization ProjectDocument35 paginiWind Tunnel Revitalization ProjectSeyton123Încă nu există evaluări
- Six Sigma BSI Training Sales BrochureDocument12 paginiSix Sigma BSI Training Sales BrochureJohnstone Mutisya MwanthiÎncă nu există evaluări
- MEM22002ADocument6 paginiMEM22002ASeyton123Încă nu există evaluări
- MEM16008ADocument3 paginiMEM16008ASeyton123Încă nu există evaluări
- List of Accidents On Nh202-From Kazipet Junction To Ambedkar JunctionDocument31 paginiList of Accidents On Nh202-From Kazipet Junction To Ambedkar JunctionRatna SaiÎncă nu există evaluări
- Pro Parts Catalog 2019Document924 paginiPro Parts Catalog 2019Marco Wei100% (1)
- Fallas Bora 1.8TDocument3 paginiFallas Bora 1.8TJulio Ortega WalkerÎncă nu există evaluări
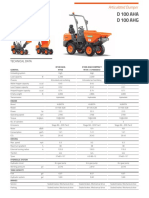
- D 100 AHA D 100 AHG: Articulated DumperDocument2 paginiD 100 AHA D 100 AHG: Articulated DumperNazeeh Abdulrhman AlbokaryÎncă nu există evaluări
- Ecu Tuning Guide ContentsDocument77 paginiEcu Tuning Guide ContentsMarek „Marek789” Możdżeń100% (4)
- DZ04 Stockreport 20201228220722Document174 paginiDZ04 Stockreport 20201228220722Edi PranotoÎncă nu există evaluări
- Suzuki Ignis ManualDocument368 paginiSuzuki Ignis ManualJoeÎncă nu există evaluări
- FLT Type & FeaturesDocument13 paginiFLT Type & FeaturesAkhtar QuddusÎncă nu există evaluări
- Tokico Shock Absober 2013 CatalogueDocument324 paginiTokico Shock Absober 2013 CatalogueZeli Abdullah83% (6)
- Fundamental Analysis vs. Technical AnalysisDocument12 paginiFundamental Analysis vs. Technical AnalysisUmesh NandaÎncă nu există evaluări
- Jimny PDFDocument237 paginiJimny PDFRustico Guerreiro100% (1)
- Toyota Hilux d4d Engine Repair Manual PDFDocument2 paginiToyota Hilux d4d Engine Repair Manual PDFRaymond de Villiers31% (29)
- Audi - US A6 - 2013 PDFDocument23 paginiAudi - US A6 - 2013 PDFIvan PolataykoÎncă nu există evaluări
- Running RecallsDocument1 paginăRunning RecallsWXYZ-TV Channel 7 DetroitÎncă nu există evaluări
- Multi Mode 4WD and Rear Differential Lock: 212 Toyota Tacoma (Em01D0U)Document6 paginiMulti Mode 4WD and Rear Differential Lock: 212 Toyota Tacoma (Em01D0U)jose luisÎncă nu există evaluări
- Pro 6046Document2 paginiPro 6046Ankur MestryÎncă nu există evaluări
- Navistar MilCOTSDocument14 paginiNavistar MilCOTSEliotÎncă nu există evaluări
- Manual Volvo XC90 2005Document17 paginiManual Volvo XC90 2005Diego Alejandro QuinteroÎncă nu există evaluări
- Ficha Tecnica de Montacargas de 1.5 A 3.5 TonDocument16 paginiFicha Tecnica de Montacargas de 1.5 A 3.5 TonRasec IsnayÎncă nu există evaluări
- Source Launch VALUE 300 PLUS Same VALUE500 PLUS R1234YF&R134 Refrigerant Machine OnDocument1 paginăSource Launch VALUE 300 PLUS Same VALUE500 PLUS R1234YF&R134 Refrigerant Machine OnhasbulohÎncă nu există evaluări
- 2018 2019 WIT AutomaticDocument1.401 pagini2018 2019 WIT Automaticrobertoperez525Încă nu există evaluări
- 515 - 4LRDocument34 pagini515 - 4LRMiguel AtencioÎncă nu există evaluări
- A Project Report On Marketing Strategies Followed by Bellad Motors and Its CompetitorsDocument66 paginiA Project Report On Marketing Strategies Followed by Bellad Motors and Its CompetitorsBabasab Patil (Karrisatte)100% (1)
- JGL 45Document160 paginiJGL 45Ulises QuezadaÎncă nu există evaluări
- Sandero Stepway BrochureDocument16 paginiSandero Stepway BrochuremotocondriaÎncă nu există evaluări
- AMDU 2016 Exhibitor List Online 01Document35 paginiAMDU 2016 Exhibitor List Online 01demos70Încă nu există evaluări
- KOLBENSCHMIDT Sputter Bearings - O.E. Quality For The AftermarketDocument2 paginiKOLBENSCHMIDT Sputter Bearings - O.E. Quality For The AftermarketADÎncă nu există evaluări
- Alfa RomeoDocument53 paginiAlfa RomeoSneha Chauhan0% (1)
- Camiões - Quantidade de Gás R134A para Ac Original: Marca Modelo ANO QTD RefrigeranteDocument4 paginiCamiões - Quantidade de Gás R134A para Ac Original: Marca Modelo ANO QTD RefrigerantePedro ChutroÎncă nu există evaluări
- Creative Abstract Watercolor: The beginner's guide to expressive and imaginative paintingDe la EverandCreative Abstract Watercolor: The beginner's guide to expressive and imaginative paintingEvaluare: 3 din 5 stele3/5 (1)
- Art Models Becca425: Figure Drawing Pose ReferenceDe la EverandArt Models Becca425: Figure Drawing Pose ReferenceEvaluare: 3.5 din 5 stele3.5/5 (3)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestDe la EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestEvaluare: 4 din 5 stele4/5 (28)
- Art Models Saju081: Figure Drawing Pose ReferenceDe la EverandArt Models Saju081: Figure Drawing Pose ReferenceÎncă nu există evaluări
- Art Models KatarinaK034: Figure Drawing Pose ReferenceDe la EverandArt Models KatarinaK034: Figure Drawing Pose ReferenceEvaluare: 3 din 5 stele3/5 (2)
- Swatch This, 3000+ Color Palettes for Success: Perfect for Artists, Designers, MakersDe la EverandSwatch This, 3000+ Color Palettes for Success: Perfect for Artists, Designers, MakersEvaluare: 3.5 din 5 stele3.5/5 (3)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerDe la EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerEvaluare: 4.5 din 5 stele4.5/5 (54)
- The Botanical Hand Lettering Workbook: Draw Whimsical & Decorative Styles & ScriptsDe la EverandThe Botanical Hand Lettering Workbook: Draw Whimsical & Decorative Styles & ScriptsEvaluare: 4.5 din 5 stele4.5/5 (2)
- Art Models Mandy447: Figure Drawing Pose ReferenceDe la EverandArt Models Mandy447: Figure Drawing Pose ReferenceÎncă nu există evaluări
- Celtic Line Drawing - Simplified InstructionsDe la EverandCeltic Line Drawing - Simplified InstructionsEvaluare: 5 din 5 stele5/5 (4)
- Art Models AnaRebecca009: Figure Drawing Pose ReferenceDe la EverandArt Models AnaRebecca009: Figure Drawing Pose ReferenceEvaluare: 4 din 5 stele4/5 (5)
- Drawing and Sketching Portraits: How to Draw Realistic Faces for BeginnersDe la EverandDrawing and Sketching Portraits: How to Draw Realistic Faces for BeginnersEvaluare: 5 din 5 stele5/5 (5)
- Beginner's Guide To Procreate: Characters: How to create characters on an iPad ®De la EverandBeginner's Guide To Procreate: Characters: How to create characters on an iPad ®3dtotal PublishingEvaluare: 4 din 5 stele4/5 (1)
- Art Models SarahAnn031: Figure Drawing Pose ReferenceDe la EverandArt Models SarahAnn031: Figure Drawing Pose ReferenceEvaluare: 3 din 5 stele3/5 (4)
- Art Models Jenni001: Figure Drawing Pose ReferenceDe la EverandArt Models Jenni001: Figure Drawing Pose ReferenceEvaluare: 5 din 5 stele5/5 (1)
- 15-Minute Watercolor Masterpieces: Create Frame-Worthy Art in Just a Few Simple StepsDe la Everand15-Minute Watercolor Masterpieces: Create Frame-Worthy Art in Just a Few Simple StepsEvaluare: 4.5 din 5 stele4.5/5 (7)
- Art Models AnaIv435: Figure Drawing Pose ReferenceDe la EverandArt Models AnaIv435: Figure Drawing Pose ReferenceÎncă nu există evaluări
- Watercolor For The Soul: Simple painting projects for beginners, to calm, soothe and inspireDe la EverandWatercolor For The Soul: Simple painting projects for beginners, to calm, soothe and inspireEvaluare: 5 din 5 stele5/5 (6)
- The Perspective Drawing Guide: Simple Techniques for Mastering Every AngleDe la EverandThe Perspective Drawing Guide: Simple Techniques for Mastering Every AngleEvaluare: 4 din 5 stele4/5 (1)
- Art Models 10: Photos for Figure Drawing, Painting, and SculptingDe la EverandArt Models 10: Photos for Figure Drawing, Painting, and SculptingEvaluare: 2.5 din 5 stele2.5/5 (6)
- One Zentangle a Day: A 6-Week Course in Creative Drawing for Relaxation, Inspiration, and FunDe la EverandOne Zentangle a Day: A 6-Week Course in Creative Drawing for Relaxation, Inspiration, and FunEvaluare: 4 din 5 stele4/5 (25)
- Art Models Adrina032: Figure Drawing Pose ReferenceDe la EverandArt Models Adrina032: Figure Drawing Pose ReferenceEvaluare: 5 din 5 stele5/5 (2)
- Art Models AnaIv309: Figure Drawing Pose ReferenceDe la EverandArt Models AnaIv309: Figure Drawing Pose ReferenceEvaluare: 3 din 5 stele3/5 (2)
- Art Models Felicia016: Figure Drawing Pose ReferenceDe la EverandArt Models Felicia016: Figure Drawing Pose ReferenceEvaluare: 3 din 5 stele3/5 (2)
- Art Models Sam074: Figure Drawing Pose ReferenceDe la EverandArt Models Sam074: Figure Drawing Pose ReferenceEvaluare: 4 din 5 stele4/5 (1)
- Art Models Thea032: Figure Drawing Pose ReferenceDe la EverandArt Models Thea032: Figure Drawing Pose ReferenceÎncă nu există evaluări
- Draw Every Little Thing: Learn to Draw More Than 100 Everyday Items, From Food to FashionDe la EverandDraw Every Little Thing: Learn to Draw More Than 100 Everyday Items, From Food to FashionEvaluare: 4.5 din 5 stele4.5/5 (4)
- Watercolor in Nature: Paint Woodland Wildlife and Botanicals with 20 Beginner-Friendly ProjectsDe la EverandWatercolor in Nature: Paint Woodland Wildlife and Botanicals with 20 Beginner-Friendly ProjectsEvaluare: 5 din 5 stele5/5 (1)