S-ar putea să vă placă și
- Staggered Truss Framing Systems Using ETABSDocument12 paginiStaggered Truss Framing Systems Using ETABSOttawa CanadaÎncă nu există evaluări
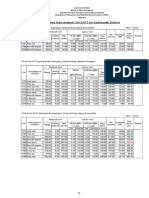
- Sanitary Rate 072 73 Kath FinalDocument14 paginiSanitary Rate 072 73 Kath FinalŔaɓiɳ ṨhtÎncă nu există evaluări
- E1 To Ethernet Converter HPC-4E1-4ETH: DescriptionDocument2 paginiE1 To Ethernet Converter HPC-4E1-4ETH: Descriptionanhtuan29100% (1)
- Ssignment Rief: P Btec C & B E 30. A S D (5)Document5 paginiSsignment Rief: P Btec C & B E 30. A S D (5)hafiz zain100% (1)
- Safdeck Specification Sheet - KenyaDocument3 paginiSafdeck Specification Sheet - KenyagraceÎncă nu există evaluări
- Schneider Electric Staj DefteriDocument15 paginiSchneider Electric Staj DefteriYavuz KaplanÎncă nu există evaluări
- Student AnswersDocument31 paginiStudent Answersdavod_ir0% (2)
- Alternatives To Breadboard: SpringboardDocument3 paginiAlternatives To Breadboard: SpringboardSomesh KshirsagarÎncă nu există evaluări
- Ae892 PDFDocument32 paginiAe892 PDFSyafmi KarotÎncă nu există evaluări
- Abaqus Manual Concrete ExamplesDocument2 paginiAbaqus Manual Concrete ExamplesMohamad Reza0% (1)
- Transportation CalculationsDocument11 paginiTransportation CalculationsdangptitÎncă nu există evaluări
- BNV5106 CWRK Assessment Brief 2021 (2)Document16 paginiBNV5106 CWRK Assessment Brief 2021 (2)Parth Daxini100% (1)
- Roll-Up DoorDocument4 paginiRoll-Up DoorMario M. NavallascaÎncă nu există evaluări
- 10 NanoGrout SG-Anchoring Resin PDFDocument3 pagini10 NanoGrout SG-Anchoring Resin PDFarunjacobn100% (2)
- Explanatory Information FM Table 3.1 TR34 4th Edition 2013Document10 paginiExplanatory Information FM Table 3.1 TR34 4th Edition 2013jay76123123Încă nu există evaluări
- Suggestion of Management Method of Ready-Mixed Concrete (RMC) Pouring Centred On Construction SiteDocument1 paginăSuggestion of Management Method of Ready-Mixed Concrete (RMC) Pouring Centred On Construction SiteSenthil KumarÎncă nu există evaluări
- Asphalt NotesDocument15 paginiAsphalt NotesSaeed AhmedÎncă nu există evaluări
- ITCC in Riyadh Residential Complex J10-13300: 08520-1 Aluminum WindowsDocument7 paginiITCC in Riyadh Residential Complex J10-13300: 08520-1 Aluminum WindowsuddinnadeemÎncă nu există evaluări
- VM FinalizeDocument45 paginiVM FinalizeSinyuen YeohÎncă nu există evaluări
- GSM Based Home AutomationDocument16 paginiGSM Based Home AutomationNimal_V_Anil_2526100% (5)
- The Disadvantages of Steel StructuresDocument6 paginiThe Disadvantages of Steel Structuresjun rosarioÎncă nu există evaluări
- D2-Adebayo Abeeb AdelaniDocument15 paginiD2-Adebayo Abeeb AdelaniLasisi Kayode HassanÎncă nu există evaluări
- Macaulays Method For A Timoshenko Beam PDFDocument9 paginiMacaulays Method For A Timoshenko Beam PDFPablo RicoÎncă nu există evaluări
- Containerized Switch Station Foundation Calculation R0Document26 paginiContainerized Switch Station Foundation Calculation R0Allan MwesigwaÎncă nu există evaluări
- MDC Patoq0202Document75 paginiMDC Patoq0202Ezekiel Dela Paz Bueno0% (1)
- Superfan Brochure AllmodelsDocument20 paginiSuperfan Brochure Allmodelsbluewindinnovations2023Încă nu există evaluări
- A Technical Presentation: Nano IC EngineDocument25 paginiA Technical Presentation: Nano IC EngineNitsam7Încă nu există evaluări
- Civil Engineering Interview Questions and Answers - Part 5 PDFDocument1 paginăCivil Engineering Interview Questions and Answers - Part 5 PDFSiva2sankarÎncă nu există evaluări
- 01 JSB551 Introduction To Design of Multi Storey BuildingsDocument34 pagini01 JSB551 Introduction To Design of Multi Storey BuildingsBarongan BsgÎncă nu există evaluări
- Vibration Serviceability of Long-Span Concrete BuiDocument74 paginiVibration Serviceability of Long-Span Concrete BuiYaser ShabasyÎncă nu există evaluări
- Material List Summary Type1Document2 paginiMaterial List Summary Type1Gad100% (1)
- MasterGlenium SKY 8233 v2 PDFDocument3 paginiMasterGlenium SKY 8233 v2 PDFRaju VeeraÎncă nu există evaluări
- Sample Primavera Project NewDocument13 paginiSample Primavera Project NewRama KrishnaÎncă nu există evaluări
- Introduction About Internship Industry ProfileDocument35 paginiIntroduction About Internship Industry ProfileThushar DÎncă nu există evaluări
- Workshop 16 Thermal-Stress Analysis of Intersecting Pipes: ContinueDocument21 paginiWorkshop 16 Thermal-Stress Analysis of Intersecting Pipes: ContinueNguyen Trong HoÎncă nu există evaluări
- Module - 5 - NotesDocument34 paginiModule - 5 - NotesBUNTI MNÎncă nu există evaluări
- Conveyor - Service - Parts Stero SCT 94sDocument32 paginiConveyor - Service - Parts Stero SCT 94sJose MarcanoÎncă nu există evaluări
- Ethiopian Building Proclamation No. 624 - 2009ethiopian Legal BriefDocument38 paginiEthiopian Building Proclamation No. 624 - 2009ethiopian Legal Briefbereket gÎncă nu există evaluări
- Codesolar Lorentz SM lc175-24m En-1 PDFDocument2 paginiCodesolar Lorentz SM lc175-24m En-1 PDFwalter_lopezvÎncă nu există evaluări
- Command Area Management Study of Karjan Dam Using Remote Sensing and GISDocument8 paginiCommand Area Management Study of Karjan Dam Using Remote Sensing and GISIJSTEÎncă nu există evaluări
- 3 Pipe Sizing 2013 3Document34 pagini3 Pipe Sizing 2013 3siva anand100% (1)
- Rehabilitation of Damaged Concrete Structures: Peter BarlowDocument43 paginiRehabilitation of Damaged Concrete Structures: Peter Barlowdnavarrete01Încă nu există evaluări
- Tuned Liquid DamperDocument86 paginiTuned Liquid Damperabdulloh_99Încă nu există evaluări
- Functions of Database ServerDocument4 paginiFunctions of Database ServerOlaoluwaAyodejiOmo-Akin0% (2)
- Development Length of Bars - Daily CivilDocument5 paginiDevelopment Length of Bars - Daily CivilfelixÎncă nu există evaluări
- VIVA QuestionsDocument3 paginiVIVA QuestionsKh Bappi ShahriarÎncă nu există evaluări
- Maintenance Manual Line: For Rotax Engine Type 912 SeriesDocument177 paginiMaintenance Manual Line: For Rotax Engine Type 912 SeriesYarisa VangeÎncă nu există evaluări
- Punchlist 50 60th FLRDocument320 paginiPunchlist 50 60th FLRChristine CafugauanÎncă nu există evaluări
- Work Continuity Certificate - To Whom It May Concern: Date: Company NameDocument2 paginiWork Continuity Certificate - To Whom It May Concern: Date: Company NameFun TonÎncă nu există evaluări
- Simulation of IEEE 802.15Document8 paginiSimulation of IEEE 802.15heriedsÎncă nu există evaluări
- Readme ENDocument3 paginiReadme ENjoxeno907Încă nu există evaluări
- Tutorial Kit (Building Tech 200 Level) - Vol. 2Document40 paginiTutorial Kit (Building Tech 200 Level) - Vol. 2Mustapha shehu100% (1)
- AD00691M JISKOOT JetMix System BrochureDocument4 paginiAD00691M JISKOOT JetMix System BrochureMohammad Fahmi Rahmana100% (1)
- Smooth Wheel Roller: Hanif Audina Rahmawati Siti PrizkanisaDocument12 paginiSmooth Wheel Roller: Hanif Audina Rahmawati Siti PrizkanisaHanif Audina RahmawatiÎncă nu există evaluări
- Financial Statement: Why Do We Need Financial Information To Make Business Decision?Document19 paginiFinancial Statement: Why Do We Need Financial Information To Make Business Decision?steven johnÎncă nu există evaluări
- Shear WallsDocument5 paginiShear WallsersinÎncă nu există evaluări
- Simplified Finite Element Modelling of Multi-Storey Buildings: The Use of Equivalent CubesDocument6 paginiSimplified Finite Element Modelling of Multi-Storey Buildings: The Use of Equivalent CubesKy Visoth SambathÎncă nu există evaluări
- Nonlinear Analysis Methods For Reinforced Concrete Buildings With Shear WallsDocument8 paginiNonlinear Analysis Methods For Reinforced Concrete Buildings With Shear Wallsakif-benzer-6764Încă nu există evaluări
- Application of Finite Element Method in Structural DesignDocument16 paginiApplication of Finite Element Method in Structural DesignAnil KadbhaneÎncă nu există evaluări
- Modeling and Dimensioning of Structures: An IntroductionDe la EverandModeling and Dimensioning of Structures: An IntroductionÎncă nu există evaluări