S-ar putea să vă placă și
- 03 Nonparametrik 2Document10 pagini03 Nonparametrik 2Fadli WardanaÎncă nu există evaluări
- Fault Detection of PM Synchronous Motor Via Modulating FunctionsDocument6 paginiFault Detection of PM Synchronous Motor Via Modulating Functionsjithesh87Încă nu există evaluări
- Motor Modeling and Position Control Lab Week 3: Closed Loop ControlDocument14 paginiMotor Modeling and Position Control Lab Week 3: Closed Loop ControlJanett TrujilloÎncă nu există evaluări
- Development of Empirical Models From Process Data: - An Attractive AlternativeDocument10 paginiDevelopment of Empirical Models From Process Data: - An Attractive Alternative李承家Încă nu există evaluări
- Estimating Second-Order Plus Dead Time Model ParametersDocument5 paginiEstimating Second-Order Plus Dead Time Model ParameterstimÎncă nu există evaluări
- Assignment One Regular AAIT 2022Document6 paginiAssignment One Regular AAIT 2022tsegaye2321Încă nu există evaluări
- Applications of Adjoint TheoryDocument18 paginiApplications of Adjoint TheoryaliÎncă nu există evaluări
- Development of Empirical Models From Process Data: - An Attractive AlternativeDocument27 paginiDevelopment of Empirical Models From Process Data: - An Attractive AlternativeJamel CayabyabÎncă nu există evaluări
- Second Order Hold Based Discretization Method ofDocument5 paginiSecond Order Hold Based Discretization Method ofvitinrjÎncă nu există evaluări
- HET312 NotesDocument41 paginiHET312 NotesTing SamuelÎncă nu există evaluări
- Nu Taro ContinuousDocument23 paginiNu Taro ContinuousRavi KumarÎncă nu există evaluări
- A Practical Predictive Control Algorithm For A Large Class of ProcessesDocument5 paginiA Practical Predictive Control Algorithm For A Large Class of ProcessesCatalin PirlogÎncă nu există evaluări
- Plugin 1 s2.0 S0167691198000127 Main PDFDocument7 paginiPlugin 1 s2.0 S0167691198000127 Main PDFUsef UsefiÎncă nu există evaluări
- CDS 110b Norms of Signals and SystemsDocument10 paginiCDS 110b Norms of Signals and SystemsSatyavir YadavÎncă nu există evaluări
- PID ControllerDocument13 paginiPID Controllerdar20092010Încă nu există evaluări
- Young Acc 06 ControlDocument6 paginiYoung Acc 06 ControlGustavo HRÎncă nu există evaluări
- Augmented UKFDocument6 paginiAugmented UKFJang-Seong ParkÎncă nu există evaluări
- Trajectory Tracking Control of Ball and Plate System Based On Auto-Disturbance Rejection ControllerDocument6 paginiTrajectory Tracking Control of Ball and Plate System Based On Auto-Disturbance Rejection ControllerAyushman BaruaÎncă nu există evaluări
- Identification and Estimation (Empirical Models) : D T U G T yDocument11 paginiIdentification and Estimation (Empirical Models) : D T U G T yAnonymous JDXbBDBÎncă nu există evaluări
- Yt X HT D: Lecture 9: Convolution Evaluation: Continuous Time SystemDocument5 paginiYt X HT D: Lecture 9: Convolution Evaluation: Continuous Time SystemRajat RameshÎncă nu există evaluări
- A Sliding Mode-Multimodel Control For A Sensorless Pumping SystemDocument6 paginiA Sliding Mode-Multimodel Control For A Sensorless Pumping SystemKatherine DukeÎncă nu există evaluări
- Chapter 6: Development of Empirical Models From Process DataDocument8 paginiChapter 6: Development of Empirical Models From Process DatamalekÎncă nu există evaluări
- A Switching Controller For Uncertain Nonlinear Systems: Lecture NotesDocument8 paginiA Switching Controller For Uncertain Nonlinear Systems: Lecture NotesEzequiel PezoÎncă nu există evaluări
- Assignment Power System DynamicsDocument9 paginiAssignment Power System DynamicsBittu AgarwalÎncă nu există evaluări
- A PID Automatic Tuning Method For Distributed-Lag Processes (2009)Document7 paginiA PID Automatic Tuning Method For Distributed-Lag Processes (2009)René PereiraÎncă nu există evaluări
- Self-Tuning Control Based On Generalized Minimum Variance CriterionDocument6 paginiSelf-Tuning Control Based On Generalized Minimum Variance CriterionSaifizi SaidonÎncă nu există evaluări
- Versuch 3tankDocument16 paginiVersuch 3tankMadalina GheorgheÎncă nu există evaluări
- Auto-Tuning of PID Controllers Via Extremum SeekingDocument6 paginiAuto-Tuning of PID Controllers Via Extremum SeekingjuliiojaiimesÎncă nu există evaluări
- Statement 2: Under The Assumptions of This Theorem For AnyDocument7 paginiStatement 2: Under The Assumptions of This Theorem For AnyFu ShizhouÎncă nu există evaluări
- Stability Analysis and Compensation of Time Delays in Analog Control SystemsDocument18 paginiStability Analysis and Compensation of Time Delays in Analog Control Systemsamir shaharanÎncă nu există evaluări
- Robust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduDocument4 paginiRobust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduInnovative Research PublicationsÎncă nu există evaluări
- 6 59 1 PBDocument8 pagini6 59 1 PBSaifizi SaidonÎncă nu există evaluări
- Robust Tuning Procedures of Dead-Time Compensating ControllersDocument28 paginiRobust Tuning Procedures of Dead-Time Compensating ControllersNadir ZubovićÎncă nu există evaluări
- CD Paper Pag 277Document8 paginiCD Paper Pag 277Anonymous lEBdswQXmxÎncă nu există evaluări
- XTP23 151 Paperstampedno PDFDocument6 paginiXTP23 151 Paperstampedno PDFUsef UsefiÎncă nu există evaluări
- Research Article: On Chattering-Free Dynamic Sliding Mode Controller DesignDocument8 paginiResearch Article: On Chattering-Free Dynamic Sliding Mode Controller DesignChiNguyenVanÎncă nu există evaluări
- Design and Implementation of Proportional Integral Observer Based Linear Model Predictive ControllerDocument8 paginiDesign and Implementation of Proportional Integral Observer Based Linear Model Predictive ControllerIDESÎncă nu există evaluări
- Linear System Theory: LinearizationDocument29 paginiLinear System Theory: LinearizationThanh NguyenÎncă nu există evaluări
- Multivariate Data Analysis WikiDocument19 paginiMultivariate Data Analysis Wikimaheshlakade755Încă nu există evaluări
- O.dyer PIDDocument205 paginiO.dyer PIDHemaÎncă nu există evaluări
- 2003 - Discretization Method DC MotorDocument4 pagini2003 - Discretization Method DC MotorTheodoroFirmoÎncă nu există evaluări
- HHT Alpha MethodDocument22 paginiHHT Alpha MethodSasi Sudhahar ChinnasamyÎncă nu există evaluări
- Time Series Analysis Exercises: Universität PotsdamDocument30 paginiTime Series Analysis Exercises: Universität PotsdamSD100% (1)
- ENGD3038 - Rectilinear 2.0Document15 paginiENGD3038 - Rectilinear 2.0LegendaryNÎncă nu există evaluări
- A Performance Comparison of Robust Adaptive Controllers: Linear SystemsDocument26 paginiA Performance Comparison of Robust Adaptive Controllers: Linear SystemsNacer LabedÎncă nu există evaluări
- Response Spectrum Analysis PDFDocument30 paginiResponse Spectrum Analysis PDFSujay SantraÎncă nu există evaluări
- Ictss 2012Document16 paginiIctss 2012Ahmed MahmoudÎncă nu există evaluări
- The Performance of Feedback Control SystemsDocument37 paginiThe Performance of Feedback Control SystemsmrkmatÎncă nu există evaluări
- Optimal Control of A Hybrid Dynamical System: Two Coupled TanksDocument25 paginiOptimal Control of A Hybrid Dynamical System: Two Coupled TanksPhạm Ngọc HòaÎncă nu există evaluări
- Path-Following For Non-Minimum Phase Systems Removes Performance LimitationsDocument6 paginiPath-Following For Non-Minimum Phase Systems Removes Performance LimitationsyuniervÎncă nu există evaluări
- Smith PredictorDocument7 paginiSmith PredictorugurtasdelÎncă nu există evaluări
- Modeling and Digital Simulation Case Studies: 3.1 Pre-Lab AssignmentDocument13 paginiModeling and Digital Simulation Case Studies: 3.1 Pre-Lab AssignmentLittle_skipÎncă nu există evaluări
- Nonlinear Phenomena in Pulse Width Modulated Feedback Controlled SystemsDocument6 paginiNonlinear Phenomena in Pulse Width Modulated Feedback Controlled SystemsDipanjan DasÎncă nu există evaluări
- Cascade Structural Model Approximation of Identified State Space ModelsDocument6 paginiCascade Structural Model Approximation of Identified State Space ModelsAnonymous rTRz30fÎncă nu există evaluări
- Tutorial On Input Shaping/Time Delay Control of Maneuvering Flexible StructuresDocument16 paginiTutorial On Input Shaping/Time Delay Control of Maneuvering Flexible Structures원성규Încă nu există evaluări
- Numerical Solution of Initial Value ProblemsDocument17 paginiNumerical Solution of Initial Value ProblemslambdaStudent_eplÎncă nu există evaluări
- Normalizar El ChuaDocument10 paginiNormalizar El ChuaantoniolflacoÎncă nu există evaluări
- Analog Automation and Digital Feedback Control TechniquesDe la EverandAnalog Automation and Digital Feedback Control TechniquesÎncă nu există evaluări
- Integer Optimization and its Computation in Emergency ManagementDe la EverandInteger Optimization and its Computation in Emergency ManagementÎncă nu există evaluări
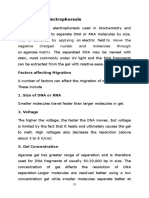
- Agarose Gel ElectrophoresisDocument4 paginiAgarose Gel ElectrophoresisTarequl Islam NishadÎncă nu există evaluări
- 1.1 Waves and Particles According To Classical PhysicsDocument8 pagini1.1 Waves and Particles According To Classical PhysicsLUCKY KUSHWAHAÎncă nu există evaluări
- Lecture 1 U & DDocument33 paginiLecture 1 U & DMr DrayÎncă nu există evaluări
- 31 M.E Ed R2010Document61 pagini31 M.E Ed R2010Jason JohnsonÎncă nu există evaluări
- Refrigeration CatalogDocument32 paginiRefrigeration CatalogSami ThirunavukkarasuÎncă nu există evaluări
- Observation Lesson in Physics DLP Activity 2 Now You Go Now Yu WontDocument2 paginiObservation Lesson in Physics DLP Activity 2 Now You Go Now Yu WontEmma Santua50% (2)
- Lincolnweld 888 & LA-85Document2 paginiLincolnweld 888 & LA-85Pablo PazÎncă nu există evaluări
- Summary of Changes ASME Sec. VIII-Div 2.Document4 paginiSummary of Changes ASME Sec. VIII-Div 2.Ratnakar PatilÎncă nu există evaluări
- PHYSICS FOR ENGINEERS Chapter 2Document30 paginiPHYSICS FOR ENGINEERS Chapter 2Leo Prince GicanaÎncă nu există evaluări
- Thermo Scientific Belt Conveyor Scale HandbookDocument20 paginiThermo Scientific Belt Conveyor Scale HandbookEJECUTIVO_1Încă nu există evaluări
- Composite Construction Design (ULS Only)Document93 paginiComposite Construction Design (ULS Only)CawanNeroMiranio100% (1)
- Final Test: Grade: 3 Time: 30 Minutes Your Name: .. ScoreDocument8 paginiFinal Test: Grade: 3 Time: 30 Minutes Your Name: .. ScoreThu NguyenÎncă nu există evaluări
- Herschel 400 2 Log BookDocument29 paginiHerschel 400 2 Log BookEveraldo FaustinoÎncă nu există evaluări
- Rutherford Scattering - MITDocument5 paginiRutherford Scattering - MITBrayan Stiven Pardo RuizÎncă nu există evaluări
- B SafeunitDocument4 paginiB SafeunitSabariyantoÎncă nu există evaluări
- GasCalc Module enDocument2 paginiGasCalc Module ensppramÎncă nu există evaluări
- Ch26b Final Exam 2001Document7 paginiCh26b Final Exam 2001Nguyễn Tiến DũngÎncă nu există evaluări
- Experimental Study of Cuttings Transport in Directional WellsDocument14 paginiExperimental Study of Cuttings Transport in Directional WellsFabian Andrey DiazÎncă nu există evaluări
- ANSA v17.0.0 Release NotesDocument63 paginiANSA v17.0.0 Release NotesVishnu RaghavanÎncă nu există evaluări
- Range Gate Generator For FMCW Doppler Raradr PDFDocument5 paginiRange Gate Generator For FMCW Doppler Raradr PDFSrinivas CherukuÎncă nu există evaluări
- st3td 210 MW PDFDocument203 paginist3td 210 MW PDFDevesh BadsiwalÎncă nu există evaluări
- Geotechnical Variation of London Clay Across Central LondonDocument12 paginiGeotechnical Variation of London Clay Across Central LondonChiaraÎncă nu există evaluări
- Roof Beam Design CalculationDocument11 paginiRoof Beam Design CalculationArnold VercelesÎncă nu există evaluări
- Potential Kinetic EnergyDocument32 paginiPotential Kinetic EnergyKathjoy ParochaÎncă nu există evaluări
- Antena Tipo LazoDocument2 paginiAntena Tipo LazoMarllory CobosÎncă nu există evaluări
- Porirua Harbour Bathymetric SurveyDocument32 paginiPorirua Harbour Bathymetric SurveyPaul MarlowÎncă nu există evaluări
- Chiller Plant DesignDocument48 paginiChiller Plant Designryxor-mrbl100% (1)
- 65-Finite-Element-Analysis-Of-Pipes-Conveying-Fluid Mounted-On-Viscoelastic-FoundationsDocument14 pagini65-Finite-Element-Analysis-Of-Pipes-Conveying-Fluid Mounted-On-Viscoelastic-FoundationsDaniel Andres VargasÎncă nu există evaluări
- WLP Creative WritingDocument12 paginiWLP Creative Writingsheena balaisÎncă nu există evaluări
- 3-Bearing Pressure and Bearing CapacityDocument70 pagini3-Bearing Pressure and Bearing Capacityvfesea100% (3)