S-ar putea să vă placă și
- Simple Matlab/Simulink exercises for signal processing and control theoryDocument8 paginiSimple Matlab/Simulink exercises for signal processing and control theoryGarunendra BunkarÎncă nu există evaluări
- DC Motor Control 2017Document43 paginiDC Motor Control 2017Rasheed ShahÎncă nu există evaluări
- 1.4 Using Matlab AND Simulink FOR System Modeling and Simulation in Data CommunicationsDocument6 pagini1.4 Using Matlab AND Simulink FOR System Modeling and Simulation in Data CommunicationsAndruska MarioÎncă nu există evaluări
- Tutorial 1assig4Document13 paginiTutorial 1assig4Ihsan ul HaqÎncă nu există evaluări
- Lab-Sheet - CSC3371-Spring 2023 - Part-1Document27 paginiLab-Sheet - CSC3371-Spring 2023 - Part-1Idriss SefriouiÎncă nu există evaluări
- Experiment 4Document13 paginiExperiment 4manikÎncă nu există evaluări
- Simulate Linear Systems LabDocument7 paginiSimulate Linear Systems LabErcanŞişkoÎncă nu există evaluări
- Laboratory ManualDocument26 paginiLaboratory ManualahmadÎncă nu există evaluări
- Experiment # 05 (CLO-1) Generating Signals Using Simulink: Exercise ObjectiveDocument5 paginiExperiment # 05 (CLO-1) Generating Signals Using Simulink: Exercise ObjectiveIshtiaq AhmedÎncă nu există evaluări
- Laboratory Mannual: Simulation, Modeling & AnalysisDocument37 paginiLaboratory Mannual: Simulation, Modeling & AnalysisshubhamÎncă nu există evaluări
- Lab 1 - Intro To Simulink and Frequency AnalysisDocument9 paginiLab 1 - Intro To Simulink and Frequency AnalysisErcanŞişkoÎncă nu există evaluări
- Lab 1Document12 paginiLab 1Ayush yadavÎncă nu există evaluări
- Exp1 dSPACEDocument19 paginiExp1 dSPACEVisheshÎncă nu există evaluări
- Simulink Exercise: Prepared by Jayakrishna Gundavelli and Hite NAME: - DATEDocument12 paginiSimulink Exercise: Prepared by Jayakrishna Gundavelli and Hite NAME: - DATEKarthikeyan SubbiyanÎncă nu există evaluări
- Lab 1: Systems Modeling in Simulink Using Differential EquationsDocument23 paginiLab 1: Systems Modeling in Simulink Using Differential EquationsHurrem ArifÎncă nu există evaluări
- Electronic Workbench Multisim Tutorial (Basic)Document25 paginiElectronic Workbench Multisim Tutorial (Basic)ជើងកាង ភូមិÎncă nu există evaluări
- MultiSim TutorialDocument25 paginiMultiSim TutorialskelleonÎncă nu există evaluări
- Ejemplos Tutorial Control Con Matlab PDFDocument129 paginiEjemplos Tutorial Control Con Matlab PDFRicardo TroncosoÎncă nu există evaluări
- ORCAD Tutorial - Capture CISDocument8 paginiORCAD Tutorial - Capture CISjack0011Încă nu există evaluări
- Caspoc PDFDocument56 paginiCaspoc PDFRahulÎncă nu există evaluări
- Simulink TutorialDocument51 paginiSimulink TutorialAli AhmadÎncă nu există evaluări
- Motor Speed - Simulink ControlDocument9 paginiMotor Speed - Simulink ControlJesamarsÎncă nu există evaluări
- Multisim Tutorial: Basic Circuit SimulationDocument25 paginiMultisim Tutorial: Basic Circuit SimulationSilver WolvesÎncă nu există evaluări
- Caspoc From Scratch An Engineers Workbook: Simulation and Animation of Power Electronics and Electrical DrivesDocument55 paginiCaspoc From Scratch An Engineers Workbook: Simulation and Animation of Power Electronics and Electrical Drivesyr48Încă nu există evaluări
- Work Bench PDFDocument25 paginiWork Bench PDFJimi DbonoÎncă nu există evaluări
- Written Directions For EV3 Line Follow PDFDocument23 paginiWritten Directions For EV3 Line Follow PDFEvandro Andrade100% (1)
- ECE 411 Computer Lab 1Document9 paginiECE 411 Computer Lab 1Sekar PrasetyaÎncă nu există evaluări
- Example: Modeling A Cruise Control System in Simulink: Physical Setup and System EquationsDocument11 paginiExample: Modeling A Cruise Control System in Simulink: Physical Setup and System EquationsothmanÎncă nu există evaluări
- Multi Sim Tutorial 2Document9 paginiMulti Sim Tutorial 2Deepesh SharmaÎncă nu există evaluări
- Signals&Systems Lab 13 - 2Document9 paginiSignals&Systems Lab 13 - 2Muhamad AbdullahÎncă nu există evaluări
- Matlab, Simulink - Simulink Modeling Tutorial - Train SystemDocument14 paginiMatlab, Simulink - Simulink Modeling Tutorial - Train Systembubo28Încă nu există evaluări
- 2013 Lab MatlabSimulinkDocument9 pagini2013 Lab MatlabSimulinkwilldota100% (1)
- LAB 02 ControlDocument20 paginiLAB 02 Controlfiaz023Încă nu există evaluări
- Introduction To Labview For Control Design and Simulation PDFDocument15 paginiIntroduction To Labview For Control Design and Simulation PDFKunal KhandelwalÎncă nu există evaluări
- Simscape Mecanico Con MatlabDocument15 paginiSimscape Mecanico Con MatlabRaphaelCaldeÎncă nu există evaluări
- Lab1-Questions and Scheme RubricDocument8 paginiLab1-Questions and Scheme RubricHafizi AzmiÎncă nu există evaluări
- R - H I T: Lab 1 Introduction To First Order Circuits Using Multisim, Matlab and Simulink ObjectiveDocument136 paginiR - H I T: Lab 1 Introduction To First Order Circuits Using Multisim, Matlab and Simulink ObjectiveGeorge BrownÎncă nu există evaluări
- Lab 1 - System Response Using MatLabDocument8 paginiLab 1 - System Response Using MatLabJesse PressleyÎncă nu există evaluări
- Simulink TutorialDocument51 paginiSimulink Tutorialkapilkumar18Încă nu există evaluări
- Introduction To Matlab SimulinkDocument45 paginiIntroduction To Matlab SimulinkSami KasawatÎncă nu există evaluări
- 11-Simulink: Communication Dept. Computer Programming. /second Year Lect. 11Document9 pagini11-Simulink: Communication Dept. Computer Programming. /second Year Lect. 11محمد الساعديÎncă nu există evaluări
- Simulating Control Systems With Simulink and MATLABDocument5 paginiSimulating Control Systems With Simulink and MATLABsaharÎncă nu există evaluări
- MMS-Week6-Exercise5 Creating An OscilloscopeDocument9 paginiMMS-Week6-Exercise5 Creating An Oscilloscopesaujan126Încă nu există evaluări
- EE 340: Control Systems Lab 4 Manual Introduction To SimulinkDocument13 paginiEE 340: Control Systems Lab 4 Manual Introduction To SimulinkAnsar NiaziÎncă nu există evaluări
- Session 2: Basic Operation and Analysis of A DC/DC ConverterDocument10 paginiSession 2: Basic Operation and Analysis of A DC/DC ConverterSanty LeónÎncă nu există evaluări
- Scilab Recipe 3 - Xcos Blocks Seasoning - Scilab NinjaDocument8 paginiScilab Recipe 3 - Xcos Blocks Seasoning - Scilab NinjaWendell Kim LlanetaÎncă nu există evaluări
- Mfa Merit Exercises 5 Simulink 5174 2Document8 paginiMfa Merit Exercises 5 Simulink 5174 2JamesÎncă nu există evaluări
- 3-Simple Model With SimEventsDocument4 pagini3-Simple Model With SimEventslotfi_ltfÎncă nu există evaluări
- EE-361 Lab Report 2 RequirementsDocument23 paginiEE-361 Lab Report 2 RequirementsShiza ShakeelÎncă nu există evaluări
- Communication Lab1 2018Document55 paginiCommunication Lab1 2018Faez FawwazÎncă nu există evaluări
- Simulink AM modulation and demodulation tutorialDocument4 paginiSimulink AM modulation and demodulation tutorialnomaniltafÎncă nu există evaluări
- Simulink Tutorial - Create Models and Simulate Dynamic SystemsDocument10 paginiSimulink Tutorial - Create Models and Simulate Dynamic SystemsroscovanulÎncă nu există evaluări
- MEC3015 2012 Filters Tutorial 1Document3 paginiMEC3015 2012 Filters Tutorial 1AliMalikÎncă nu există evaluări
- Lab 4a Transient AnalysisDocument19 paginiLab 4a Transient AnalysisHanafi Jutawan Kayu ApiÎncă nu există evaluări
- Lab 05 Modeling of Mechanical Systems Using Simscap Multibody 2nd Generation Part 1Document19 paginiLab 05 Modeling of Mechanical Systems Using Simscap Multibody 2nd Generation Part 1Reem GheithÎncă nu există evaluări
- Matlab Simulink SimPowerSystems For Power Lab 2014Document15 paginiMatlab Simulink SimPowerSystems For Power Lab 2014Nirmal Kumar PandeyÎncă nu există evaluări
- Projects With Microcontrollers And PICCDe la EverandProjects With Microcontrollers And PICCEvaluare: 5 din 5 stele5/5 (1)
- Hacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesDe la EverandHacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesEvaluare: 5 din 5 stele5/5 (1)
- 2-stroke and 4-stroke engine valve timing diagram comparisonDocument1 pagină2-stroke and 4-stroke engine valve timing diagram comparisonRajrdbÎncă nu există evaluări
- Introduction To Fluid DynamicsDocument76 paginiIntroduction To Fluid DynamicsRajrdbÎncă nu există evaluări
- Chapter04 Z TransformDocument28 paginiChapter04 Z Transformohenri100Încă nu există evaluări
- 21 Piezoelectric SensorsDocument78 pagini21 Piezoelectric SensorsRajrdbÎncă nu există evaluări
- Boundary Layer & SeparationDocument7 paginiBoundary Layer & SeparationRajrdbÎncă nu există evaluări
- Accelerometers: Team SevenDocument6 paginiAccelerometers: Team SevenRajrdbÎncă nu există evaluări
- Modeling and Simulation of Dynamic Systems: Lecture Notes of ME 862Document9 paginiModeling and Simulation of Dynamic Systems: Lecture Notes of ME 862RajrdbÎncă nu există evaluări
- Hall BookDocument126 paginiHall BookbanguyenbkÎncă nu există evaluări
- Windtunnelex 091119025051 Phpapp01Document31 paginiWindtunnelex 091119025051 Phpapp01RajrdbÎncă nu există evaluări
- 1 - Basics of ControlDocument39 pagini1 - Basics of ControlRajrdbÎncă nu există evaluări
- Problem Set 1Document44 paginiProblem Set 1RajrdbÎncă nu există evaluări
- Toy Part DetailsDocument1 paginăToy Part DetailsRajrdbÎncă nu există evaluări
- Unipole MultipoleDocument186 paginiUnipole MultipoleNicolas AguilarÎncă nu există evaluări
- Pin Description Features: Shenzhen Tuofeng Semiconductor Technology Co., LTDDocument8 paginiPin Description Features: Shenzhen Tuofeng Semiconductor Technology Co., LTDDary CalaçaÎncă nu există evaluări
- READMEDocument8 paginiREADMESukarno Wong PatiÎncă nu există evaluări
- Measurements and Instrumentation Objective Questions With AnswersDocument3 paginiMeasurements and Instrumentation Objective Questions With AnswersMohan Raj100% (1)
- Error CodesDocument92 paginiError CodesNando SobaÎncă nu există evaluări
- At88sc DK1Document4 paginiAt88sc DK1edijhon5815Încă nu există evaluări
- 1176 PDFDocument169 pagini1176 PDFJoshua PalizaÎncă nu există evaluări
- ManualPioneer (Deh 4350ub) (Deh 3350ub)Document72 paginiManualPioneer (Deh 4350ub) (Deh 3350ub)Yohel LaghunaÎncă nu există evaluări
- Nora ManualDocument50 paginiNora ManualOlaru Vrajeala Penala Catalin-MihailÎncă nu există evaluări
- Wetwon LV Series Busway CATALOG (For Materials)Document40 paginiWetwon LV Series Busway CATALOG (For Materials)NanmÎncă nu există evaluări
- VF-DRIVE-rope-units GAA622AA CSU FD 001Document16 paginiVF-DRIVE-rope-units GAA622AA CSU FD 001Coil98Încă nu există evaluări
- 10 Instruction Sheet DOP B07S410Document2 pagini10 Instruction Sheet DOP B07S410Nisar AhmedÎncă nu există evaluări
- Production Sound Essentials PDFDocument6 paginiProduction Sound Essentials PDFAlex HavranÎncă nu există evaluări
- CBSE Class 9 Science Chapter 3 Revision Notes Atoms and MoleculesDocument7 paginiCBSE Class 9 Science Chapter 3 Revision Notes Atoms and MoleculesMaruti NandanÎncă nu există evaluări
- MFA350 :: ROAL Living EnergyDocument7 paginiMFA350 :: ROAL Living EnergyMinhÎncă nu există evaluări
- Data Sheet For Variable Speed Drives of Medium and Large PowerDocument6 paginiData Sheet For Variable Speed Drives of Medium and Large Powerbrome2014Încă nu există evaluări
- Automatic aeroponic irrigation system based on ArduinoDocument13 paginiAutomatic aeroponic irrigation system based on ArduinoDheeraj ThakurÎncă nu există evaluări
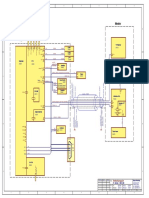
- Sigma-Amelung Trintity PC AMAX200 - Circuit DiagramDocument5 paginiSigma-Amelung Trintity PC AMAX200 - Circuit DiagramSoporte CicomerxÎncă nu există evaluări
- EmtlDocument707 paginiEmtlLaxmiSahithi100% (1)
- F4ae0481a 681aDocument190 paginiF4ae0481a 681ajvega_534120Încă nu există evaluări
- AnsysDocument22 paginiAnsysAbhijeetSethiÎncă nu există evaluări
- RAK811 Lora Module Datasheet V1.3Document14 paginiRAK811 Lora Module Datasheet V1.3Tonny-Leonard FarauanuÎncă nu există evaluări
- Synopsis 2008: Extol Institute of Management BhopalDocument10 paginiSynopsis 2008: Extol Institute of Management BhopalNaresh VaddempudiÎncă nu există evaluări
- Alcatel 1600 Series - Carritech TelecommunicationsDocument2 paginiAlcatel 1600 Series - Carritech TelecommunicationsCarritech TelecommunicationsÎncă nu există evaluări
- 957 4 1 A 57607 ECAD VLSI Lab Manual PDFDocument151 pagini957 4 1 A 57607 ECAD VLSI Lab Manual PDFBasava RajuÎncă nu există evaluări
- Part 1.1 Overview Telecom NetworkDocument39 paginiPart 1.1 Overview Telecom NetworkEithu ThutunÎncă nu există evaluări
- DANFOSS - Esquema de Ligação IHM MCD3000Document2 paginiDANFOSS - Esquema de Ligação IHM MCD3000JardelÎncă nu există evaluări
- FBP-10 Fbpi-10 FBP-15 Fbpi-15 FBP-20 Fbpi-20 FBP-25 Fbpi-25 FBP-30 Fbpi-30Document2 paginiFBP-10 Fbpi-10 FBP-15 Fbpi-15 FBP-20 Fbpi-20 FBP-25 Fbpi-25 FBP-30 Fbpi-30Edison MendozaÎncă nu există evaluări
- Abt36rba3w SMDocument26 paginiAbt36rba3w SMaircoolplusÎncă nu există evaluări
- Riso GR 3750 SwitchDocument1 paginăRiso GR 3750 Switchrosa carraraÎncă nu există evaluări