S-ar putea să vă placă și
- Typesofturbinethierapplication 150210132237 Conversion Gate01Document33 paginiTypesofturbinethierapplication 150210132237 Conversion Gate01Vivek Ranjan MaitreyÎncă nu există evaluări
- Hydraulicturbine 180529101511Document35 paginiHydraulicturbine 180529101511Muhammad Yasar JavaidÎncă nu există evaluări
- Centrifugal Pump Definition Components Working Priming Advantages Disadvantages and Applications PDFDocument7 paginiCentrifugal Pump Definition Components Working Priming Advantages Disadvantages and Applications PDFMuhammad Yasar JavaidÎncă nu există evaluări
- Introduction To Reciprocating PumpDocument11 paginiIntroduction To Reciprocating PumpMuhammad Yasar JavaidÎncă nu există evaluări
- Introduction To Pump:: Mr. V. R. MuttagiDocument11 paginiIntroduction To Pump:: Mr. V. R. MuttagiMuhammad Yasar JavaidÎncă nu există evaluări
- Pumps Pumps Pumps Pumps Pumps Pumps Pumps Pumps: CHAPTER - 11 11 11 11 11 11 11 11Document65 paginiPumps Pumps Pumps Pumps Pumps Pumps Pumps Pumps: CHAPTER - 11 11 11 11 11 11 11 11Muhammad Yasar JavaidÎncă nu există evaluări
- TurboDocument22 paginiTurboSeng SoonÎncă nu există evaluări
- Pure Heavingand Pure Pitching Motion of An Underwater GliderDocument7 paginiPure Heavingand Pure Pitching Motion of An Underwater GliderMuhammad Yasar JavaidÎncă nu există evaluări
- 441 Lecture 8Document30 pagini441 Lecture 8Muhammad Yasar JavaidÎncă nu există evaluări
- Mechanical Engineering Objective Type QuestionsDocument441 paginiMechanical Engineering Objective Type Questionsimran_chaudhry100% (1)
- HTDocument19 paginiHTMuhammad Yasar JavaidÎncă nu există evaluări
- Mel242 2Document19 paginiMel242 2Ahmad_HasinurÎncă nu există evaluări
- Workshop Practice: An IntroductionDocument32 paginiWorkshop Practice: An IntroductionSreedhar Kummaraguntla100% (2)
- Power Plant Technology by El WakilDocument46 paginiPower Plant Technology by El WakilMuhammad Yasar Javaid100% (1)
- Module 2 Ktunotes - in MinDocument14 paginiModule 2 Ktunotes - in MinMuhammad Yasar JavaidÎncă nu există evaluări
- Chapter1 1 PDFDocument13 paginiChapter1 1 PDFMuhammad Yasar JavaidÎncă nu există evaluări
- HeavingDocument44 paginiHeavingMuhammad Yasar JavaidÎncă nu există evaluări
- QUOsdcsdTEPLUS MY CMR SMB 29603345.3Document7 paginiQUOsdcsdTEPLUS MY CMR SMB 29603345.3Muhammad Yasar JavaidÎncă nu există evaluări
- Applied Model-Based Analysis and CX CXDocument23 paginiApplied Model-Based Analysis and CX CXMuhammad Yasar JavaidÎncă nu există evaluări
- A Quick Tutorial On Multibodmy DynamicsDocument25 paginiA Quick Tutorial On Multibodmy DynamicsMuhammad Yasar JavaidÎncă nu există evaluări
- 10MSc Engg Chemical Engfdgdfgineering Technology Session 2010 12Document2 pagini10MSc Engg Chemical Engfdgdfgineering Technology Session 2010 12Muhammad Yasar JavaidÎncă nu există evaluări
- A Self-Sustaining, Boundary-Layer-Adapted System For Terrain Exploration and Environmental SamplingDocument68 paginiA Self-Sustaining, Boundary-Layer-Adapted System For Terrain Exploration and Environmental SamplingClifford StoneÎncă nu există evaluări
- A Self-Sustaining, Boundary-Layer-Adapted System For Terrain Exploration and Environmental SamplingDocument68 paginiA Self-Sustaining, Boundary-Layer-Adapted System For Terrain Exploration and Environmental SamplingClifford StoneÎncă nu există evaluări
- Naca Report 1382dfgdfDocument20 paginiNaca Report 1382dfgdfMuhammad Yasar JavaidÎncă nu există evaluări
- Impact FactorDocument15 paginiImpact FactorsasinfotechÎncă nu există evaluări
- A Self-Sustaining, Boundary-Layer-Adapted System For Terrain Exploration and Environmental SamplingDocument68 paginiA Self-Sustaining, Boundary-Layer-Adapted System For Terrain Exploration and Environmental SamplingClifford StoneÎncă nu există evaluări
- Dynamic Modeling of An Autonomous Underwater VehicleDocument14 paginiDynamic Modeling of An Autonomous Underwater VehicleMuhammad Yasar JavaidÎncă nu există evaluări
- Design of A New Low Cost ROV VehicleDocument6 paginiDesign of A New Low Cost ROV VehicleMuhammad Yasar JavaidÎncă nu există evaluări
- The Numerical Gfhyjustudy of The Dynamic Behavior of An Underwater VehiclesDocument9 paginiThe Numerical Gfhyjustudy of The Dynamic Behavior of An Underwater VehiclesMuhammad Yasar JavaidÎncă nu există evaluări
- Trimcbcv Calculation Methods For A Dynamical Model of The Remus 100 AUVDocument56 paginiTrimcbcv Calculation Methods For A Dynamical Model of The Remus 100 AUVMuhammad Yasar JavaidÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- AA Holtz & Kovacs - An Introduction To Geotechnical Engineering PDFDocument746 paginiAA Holtz & Kovacs - An Introduction To Geotechnical Engineering PDFPeterÎncă nu există evaluări
- Freezing Point Depression and Boiling Point Elevation LabDocument4 paginiFreezing Point Depression and Boiling Point Elevation LabBeatrice Dominique Caragay25% (4)
- Ultrasonic Atomizing Nozzle SystemsDocument40 paginiUltrasonic Atomizing Nozzle SystemsAnonymous H8hysGxA100% (1)
- 000-Za-E-M09403 - C-MS For Cable Tray InstallationDocument15 pagini000-Za-E-M09403 - C-MS For Cable Tray Installationsyam prasad100% (1)
- Cryogenics Handbook PDFDocument227 paginiCryogenics Handbook PDFmangyanÎncă nu există evaluări
- Supriya 113418799Document4 paginiSupriya 113418799Kewl JstÎncă nu există evaluări
- 2 Related Topics Automatic IrrigationDocument13 pagini2 Related Topics Automatic IrrigationSftvsn Giovanni TandogÎncă nu există evaluări
- Dual Draw/Dual Return Fuel System TroubleshootingDocument4 paginiDual Draw/Dual Return Fuel System Troubleshootinginformer techÎncă nu există evaluări
- Bernette Ramirez Mariano Bernette Ramirez MarianoDocument1 paginăBernette Ramirez Mariano Bernette Ramirez Marianomia palacioÎncă nu există evaluări
- (Pasig) Certificate of OccupancyDocument12 pagini(Pasig) Certificate of OccupancyAndrew MarasiganÎncă nu există evaluări
- Lecture 3 - Rainfall Abstraction Computation - Rainfall Abstraction ComputationDocument33 paginiLecture 3 - Rainfall Abstraction Computation - Rainfall Abstraction ComputationNavjotSinghÎncă nu există evaluări
- WAXESDocument2 paginiWAXESPra YogaÎncă nu există evaluări
- Multi Spindl Drilling MachineDocument38 paginiMulti Spindl Drilling MachineBoopathi KalaiÎncă nu există evaluări
- Foaming of Friction Stir Processed Al /mgco3 Precursor Via Ame HeatingDocument27 paginiFoaming of Friction Stir Processed Al /mgco3 Precursor Via Ame HeatingArshad SiddiqueeÎncă nu există evaluări
- Body of Knowledge PDFDocument1 paginăBody of Knowledge PDFAda RamirezÎncă nu există evaluări
- A Simulation of Attempts To Influence Crowd Dynamics'Document6 paginiA Simulation of Attempts To Influence Crowd Dynamics'KhairulÎncă nu există evaluări
- Catapult Ref ManDocument372 paginiCatapult Ref ManBiplab RoyÎncă nu există evaluări
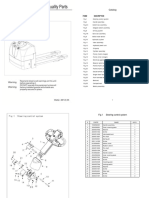
- 3000w Inverter Parts ListDocument6 pagini3000w Inverter Parts ListayoowuyeÎncă nu există evaluări
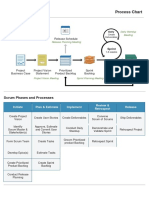
- Procesos SCRUMDocument2 paginiProcesos SCRUMRoseÎncă nu există evaluări
- 09 Technical TablesDocument8 pagini09 Technical TablesRuban Vijaya SinghÎncă nu există evaluări
- Demineralization Mechanism and Influence of Parameters On High Ash Indian Coal by Chemical Leaching of Acid and Alkali SolutionDocument1 paginăDemineralization Mechanism and Influence of Parameters On High Ash Indian Coal by Chemical Leaching of Acid and Alkali SolutionSushanta Kumar BeheraÎncă nu există evaluări
- Gear Trains ProblemsDocument9 paginiGear Trains Problemsa c s Kumar100% (1)
- Job Report 2Document6 paginiJob Report 2Sahr, Cyprian FillieÎncă nu există evaluări
- B.tech Regular Examination Fee Registration FormDocument1 paginăB.tech Regular Examination Fee Registration FormvishwasÎncă nu există evaluări
- VSSUT (EEE) SyllabusDocument47 paginiVSSUT (EEE) SyllabusAshutosh GuptaÎncă nu există evaluări
- Brilliance - 64 - (ct101) - Site - Guidefor TrailerDocument19 paginiBrilliance - 64 - (ct101) - Site - Guidefor Trailerbody2030Încă nu există evaluări
- Corrosion of Stainless SteelsDocument5 paginiCorrosion of Stainless Steelsparasite0167% (3)
- Highway Engineering B 1Document8 paginiHighway Engineering B 1Angelica TolentinoÎncă nu există evaluări
- Catalog: Ningbo Liftstar Material Handling Equipment Co., LTDDocument27 paginiCatalog: Ningbo Liftstar Material Handling Equipment Co., LTDKiều Văn TrungÎncă nu există evaluări
- Technical Information Sheet: General Information: ISO 12944 TI - G 9 / UsaDocument6 paginiTechnical Information Sheet: General Information: ISO 12944 TI - G 9 / UsaBash MatÎncă nu există evaluări