S-ar putea să vă placă și
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Liquiphant M Density - E+H - DIA-SPDocument4 paginiLiquiphant M Density - E+H - DIA-SPEdwin Javier Garavito HernándezÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- ADM Quick Start GuideDocument8 paginiADM Quick Start GuideEdwin Javier Garavito HernándezÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Special Tool ListDocument4 paginiSpecial Tool ListEdwin Javier Garavito Hernández100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Specs BicicletasDocument14 paginiSpecs BicicletasEdwin Javier Garavito HernándezÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- КПП MYY5T АНГЛDocument31 paginiКПП MYY5T АНГЛEdwin Javier Garavito Hernández100% (2)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- MC Feed-Through Packers: Remotely Isolate Zones in Marginal or Mature AssetsDocument2 paginiMC Feed-Through Packers: Remotely Isolate Zones in Marginal or Mature AssetsEdwin Javier Garavito HernándezÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- E-Pak Feed-Thru Packer Esp4596: "Custom Solutions For Your Application"Document1 paginăE-Pak Feed-Thru Packer Esp4596: "Custom Solutions For Your Application"Edwin Javier Garavito HernándezÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Go To Download Full Manual: Cummins Engine Signature ISX and QSX15 Workshop Service Repair Manual PDF DownloadDocument1 paginăGo To Download Full Manual: Cummins Engine Signature ISX and QSX15 Workshop Service Repair Manual PDF DownloadEdwin Javier Garavito HernándezÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Isx15overhaulkit Content BypartnumberDocument2 paginiIsx15overhaulkit Content BypartnumberEdwin Javier Garavito Hernández100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Contact: Downhole Completion Products: Seal Bore/Profile Connection MaterialDocument6 paginiContact: Downhole Completion Products: Seal Bore/Profile Connection MaterialEdwin Javier Garavito HernándezÎncă nu există evaluări
- Datasheet Nucleo E EA77Document2 paginiDatasheet Nucleo E EA77Edwin Javier Garavito HernándezÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Hino Workshop Manual J08cDocument1 paginăHino Workshop Manual J08cEdwin Javier Garavito Hernández0% (1)
- J55 L80 N80Q P110 Pup Joints: SpecificationDocument1 paginăJ55 L80 N80Q P110 Pup Joints: SpecificationEdwin Javier Garavito HernándezÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- 2013 Volvo Maintenance ScheduleDocument3 pagini2013 Volvo Maintenance ScheduleEdwin Javier Garavito Hernández100% (2)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- A Low Cost Automation System Based On IoTDocument6 paginiA Low Cost Automation System Based On IoTEdwin Javier Garavito HernándezÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- ' Abrir Puerto Mientras Se Ejecute La AplicaciónDocument4 pagini' Abrir Puerto Mientras Se Ejecute La AplicaciónEdwin Javier Garavito HernándezÎncă nu există evaluări
- NVME M.2 Disk CompatibilityDocument3 paginiNVME M.2 Disk CompatibilityEdwin Javier Garavito HernándezÎncă nu există evaluări
- Datasheet Nucleo E EA77Document2 paginiDatasheet Nucleo E EA77Edwin Javier Garavito HernándezÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- 10 STATCOM Vs SVC PDFDocument27 pagini10 STATCOM Vs SVC PDFshiva sai donthulaÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
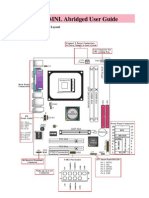
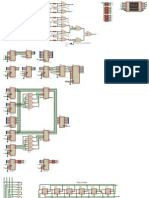
- 4PMMNL Abridged User GuideDocument4 pagini4PMMNL Abridged User Guidew_muangphuanÎncă nu există evaluări
- Soln To Some ProblemsDocument2 paginiSoln To Some ProblemsEdwin Quinlat DevizaÎncă nu există evaluări
- Overvoltage DefinitionsDocument17 paginiOvervoltage DefinitionsaocalayÎncă nu există evaluări
- Lcd2s SPI ExamplesDocument2 paginiLcd2s SPI ExamplesJarfoÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Geometry Dependence: Chapter 2 MOS Transistor TheoryDocument1 paginăGeometry Dependence: Chapter 2 MOS Transistor TheoryCarlos SaavedraÎncă nu există evaluări
- Ic FabricationDocument31 paginiIc FabricationMukesh Nexus100% (1)
- Article Labview and WaspmoteDocument3 paginiArticle Labview and WaspmoteIonel Valeriu GrozescuÎncă nu există evaluări
- VX 427 4 5 VX 417 4 5Document30 paginiVX 427 4 5 VX 417 4 5FalcoÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- 1 UL 864 Compliance: Network Communications Module NCM-W/F Product Installation DocumentDocument7 pagini1 UL 864 Compliance: Network Communications Module NCM-W/F Product Installation DocumentRicardo StimpelÎncă nu există evaluări
- Memory Management in OSDocument76 paginiMemory Management in OSratanÎncă nu există evaluări
- Mvs CommandsDocument2 paginiMvs CommandsrickparkinsonÎncă nu există evaluări
- Diode As A Switch WorkingDocument4 paginiDiode As A Switch Workingbantu1210% (1)
- Dell 2209WA Service Manual Rev 1.0Document85 paginiDell 2209WA Service Manual Rev 1.01133523568585Încă nu există evaluări
- © Sal La Duca,, 908-454-3965Document4 pagini© Sal La Duca,, 908-454-3965xman17Încă nu există evaluări
- Co Unit 1Document146 paginiCo Unit 1Adivardhan Akash MaheshwariÎncă nu există evaluări
- BD 2Document1 paginăBD 2Luis Arturo Leiva Monjaras100% (1)
- The Computer System UnitDocument2 paginiThe Computer System UnitRichard Balicat Jr.Încă nu există evaluări
- Step Response Unit ResponseDocument6 paginiStep Response Unit ResponsetirsollantadaÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Course Title: Power Electronics Course Code: ELEC304 Credit Units: 5 Level: UGDocument3 paginiCourse Title: Power Electronics Course Code: ELEC304 Credit Units: 5 Level: UGShivansh BhardwajÎncă nu există evaluări
- Diagramas Esquematicos TV LED LGDocument49 paginiDiagramas Esquematicos TV LED LGLuis Alonso Rosero Velez100% (1)
- Linear Circult Analysis Lab-Manual - 16jun 2016 PDFDocument71 paginiLinear Circult Analysis Lab-Manual - 16jun 2016 PDFHaris -Încă nu există evaluări
- EN-Sharys IP-Catalogue 2016 PDFDocument4 paginiEN-Sharys IP-Catalogue 2016 PDFThien BinhÎncă nu există evaluări
- Lc50le650u FinalDocument90 paginiLc50le650u FinalLuis Hum0% (1)
- SAP-1 Simple As Possible Computer Schematic Diagram - Updated DesignDocument1 paginăSAP-1 Simple As Possible Computer Schematic Diagram - Updated Designpong74lsÎncă nu există evaluări
- Technical Manual: Acoustic & Electrical Specifications: System ComponentsDocument2 paginiTechnical Manual: Acoustic & Electrical Specifications: System ComponentsGINO GELSIÎncă nu există evaluări
- 82-P9008-Rev2-EN - 02.11.2015Document174 pagini82-P9008-Rev2-EN - 02.11.2015MarcielArturÎncă nu există evaluări
- Ponciango AmpDocument10 paginiPonciango AmpMond Timpog LagmanÎncă nu există evaluări
- Agilent Programing DocDocument454 paginiAgilent Programing DocahmadrzrÎncă nu există evaluări
- 1040 L Scheme EceDocument201 pagini1040 L Scheme EceEng Abdulkadir MahamedÎncă nu există evaluări
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102De la EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Evaluare: 5 din 5 stele5/5 (2)