S-ar putea să vă placă și
- Bishop Wisecarver MachineDesign DifferenceBetween Belt Chain Driven Linear ActuatorsDocument2 paginiBishop Wisecarver MachineDesign DifferenceBetween Belt Chain Driven Linear ActuatorsIonut-Catalin DimacheÎncă nu există evaluări
- Team CenterDocument284 paginiTeam CenterIonut-Catalin DimacheÎncă nu există evaluări
- Lip and Groove Design Made Easy With SOLIDWORKSDocument12 paginiLip and Groove Design Made Easy With SOLIDWORKSIonut-Catalin DimacheÎncă nu există evaluări
- 1pollari Multi-Domain SE InteropDocument40 pagini1pollari Multi-Domain SE InteropIonut-Catalin DimacheÎncă nu există evaluări
- Control Engineering June 2016Document107 paginiControl Engineering June 2016Ionut-Catalin DimacheÎncă nu există evaluări
- AIAG - Advanced Product Quality Planning (APQP) 2nd EditionDocument115 paginiAIAG - Advanced Product Quality Planning (APQP) 2nd EditionWill60% (5)
- KB Metal To PlasticDocument5 paginiKB Metal To PlasticIonut-Catalin DimacheÎncă nu există evaluări
- A Quick Tour of Solid Edge Synchronous TechnologyDocument9 paginiA Quick Tour of Solid Edge Synchronous TechnologyIonut-Catalin DimacheÎncă nu există evaluări
- Pt0uk10 CTX Gamma TC Shopturn 3g PDF DataDocument6 paginiPt0uk10 CTX Gamma TC Shopturn 3g PDF DataIonut-Catalin DimacheÎncă nu există evaluări
- Ejot Delta PT WN 5412 Z 30x6 PDFDocument1 paginăEjot Delta PT WN 5412 Z 30x6 PDFIonut-Catalin DimacheÎncă nu există evaluări
- Tutorial Tzu-Yu WuDocument12 paginiTutorial Tzu-Yu WuIonut-Catalin DimacheÎncă nu există evaluări
- 364 21262 PDFDocument24 pagini364 21262 PDFIonut-Catalin DimacheÎncă nu există evaluări
- Camera ExecutieDocument1 paginăCamera ExecutieIonut-Catalin DimacheÎncă nu există evaluări
- Value EngineeringDocument55 paginiValue EngineeringIonut-Catalin DimacheÎncă nu există evaluări
- Citizen B12VIDocument4 paginiCitizen B12VIIonut-Catalin DimacheÎncă nu există evaluări
- 372 21274 PDFDocument13 pagini372 21274 PDFIonut-Catalin DimacheÎncă nu există evaluări
- VTI BrochureDocument4 paginiVTI BrochureIonut-Catalin DimacheÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- G.O For PHMED Interstate Transfers PDFDocument10 paginiG.O For PHMED Interstate Transfers PDFEE PH KHAMMAMÎncă nu există evaluări
- Light PD1Document4 paginiLight PD1Lily Suhany MahmoodÎncă nu există evaluări
- Understanding of Dynamic Voltage: Restorers Through MATLAB SimulationDocument6 paginiUnderstanding of Dynamic Voltage: Restorers Through MATLAB SimulationPhạm Quý ThắngÎncă nu există evaluări
- Electrical World 70 New yDocument1.306 paginiElectrical World 70 New yZokiÎncă nu există evaluări
- Exam in Pre-CalculusDocument1 paginăExam in Pre-CalculusmarkÎncă nu există evaluări
- Note of NumerologyDocument126 paginiNote of Numerologytushar0% (1)
- Skirt Bracing Calc For Vertical Pressure VesselsDocument4 paginiSkirt Bracing Calc For Vertical Pressure Vesselsnagtummala100% (1)
- Robots in Radioactive EnvironmentsDocument21 paginiRobots in Radioactive EnvironmentsMohimina Jawariyah67% (3)
- Nucl - Phys.B v.646Document538 paginiNucl - Phys.B v.646buddy72Încă nu există evaluări
- ANNEX II - Sample Curriculum Map Fro BSME ProgramDocument4 paginiANNEX II - Sample Curriculum Map Fro BSME ProgramcresjohnÎncă nu există evaluări
- Relative Humidity: CalculationDocument6 paginiRelative Humidity: CalculationAnto FumiantÎncă nu există evaluări
- PDMS Commands 1Document25 paginiPDMS Commands 1Perdana KusumaÎncă nu există evaluări
- Hilbert Transform - Wikipedia, The Free EncyclopediaDocument9 paginiHilbert Transform - Wikipedia, The Free EncyclopediasunilnkkumarÎncă nu există evaluări
- Reaction MechanismDocument5 paginiReaction MechanismKatniss Tathagata100% (1)
- Cs Ba-Bsc 3rd Sem 2016Document4 paginiCs Ba-Bsc 3rd Sem 2016So RvÎncă nu există evaluări
- 6362Document19 pagini6362Amit VijayvargiyaÎncă nu există evaluări
- Monofocal and Progrssive LensDocument2 paginiMonofocal and Progrssive LensPablo Ramirez CruzÎncă nu există evaluări
- Combustion Process SimulationDocument6 paginiCombustion Process SimulationKingsley Etornam AnkuÎncă nu există evaluări
- RMT RFT Calculator & Calculated SheetsDocument3 paginiRMT RFT Calculator & Calculated SheetsAnimesh_Singh10% (1)
- Van Eekelen Et Al 2011 BS8006 FinalDocument15 paginiVan Eekelen Et Al 2011 BS8006 FinalRaden Budi HermawanÎncă nu există evaluări
- Markovich 1 PridepaperfinalDocument15 paginiMarkovich 1 Pridepaperfinalapi-296918879Încă nu există evaluări
- Lecture6 140114102537 Phpapp01Document25 paginiLecture6 140114102537 Phpapp01Flávio Augusto SoaresÎncă nu există evaluări
- Forces & Motion, IGCSEDocument4 paginiForces & Motion, IGCSEsapiniÎncă nu există evaluări
- Cable Stayed Structures-SLDocument16 paginiCable Stayed Structures-SLShivansh Singh Gautam100% (1)
- Metal Film Precision Resistors: Resistive Metal Films and A New Resistor ConceptDocument19 paginiMetal Film Precision Resistors: Resistive Metal Films and A New Resistor ConceptfbaldnerÎncă nu există evaluări
- 06 Daftar PustakaDocument3 pagini06 Daftar PustakaDwiki RamadhanÎncă nu există evaluări
- Foam For EMIDocument6 paginiFoam For EMIParveen SainiÎncă nu există evaluări
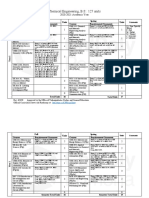
- Chemical EngineeringDocument5 paginiChemical Engineeringahmed elhamy mohamedÎncă nu există evaluări
- Power Plants Ratings GuideDocument15 paginiPower Plants Ratings Guidepanos1959Încă nu există evaluări
- ZL - 209Document2 paginiZL - 209Fraz AhmadÎncă nu există evaluări