S-ar putea să vă placă și
- Informe Final AutomatizaciónDocument12 paginiInforme Final AutomatizaciónAndrea BertieriÎncă nu există evaluări
- Acondicionamiento Señal Sensor de RevolucionesDocument7 paginiAcondicionamiento Señal Sensor de RevolucionesAndrea BertieriÎncă nu există evaluări
- Ensayo GenocidioDocument2 paginiEnsayo GenocidioAndrea BertieriÎncă nu există evaluări
- 4366 Modelo Estatutos Sociedad en Comandita Por Acciones 26072011Document12 pagini4366 Modelo Estatutos Sociedad en Comandita Por Acciones 26072011Andrea Bertieri67% (3)
- Taller Curso VacacionalDocument3 paginiTaller Curso VacacionalAndrea BertieriÎncă nu există evaluări
- Sembradores de EsperanzaDocument48 paginiSembradores de EsperanzaReligión DigitalÎncă nu există evaluări
- Rocas y Minerales Industriales Peru, Recopilacion de Info BeaDocument23 paginiRocas y Minerales Industriales Peru, Recopilacion de Info BeaBEATRIZ ALEXANDRA CCASANI HUARCAÎncă nu există evaluări
- Figuras y Pensamientos Del DERECHO PENAL Contemporáneo PDFDocument258 paginiFiguras y Pensamientos Del DERECHO PENAL Contemporáneo PDFLeoOrtiz100% (3)
- Homeopatía e InfomáticaDocument143 paginiHomeopatía e InfomáticaAlbani123Încă nu există evaluări
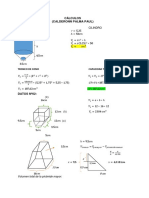
- CALCULOS de TolvaDocument6 paginiCALCULOS de TolvapaulÎncă nu există evaluări
- 4 Folleto EtaDocument2 pagini4 Folleto EtaEdinson Jose Pacheco100% (1)
- Tema 5 BotánicaDocument4 paginiTema 5 BotánicaAna Garcia MartinezÎncă nu există evaluări
- Solucion Act Apren 1Document5 paginiSolucion Act Apren 1Luz ShanikÎncă nu există evaluări
- FluoxetinaDocument22 paginiFluoxetinaIsma DiazÎncă nu există evaluări
- Copia de Precios Herramientas HHDocument64 paginiCopia de Precios Herramientas HHrodolfoordiguez_70Încă nu există evaluări
- RM-Sistemas de Numeracion y Criptoaritmetica PDFDocument4 paginiRM-Sistemas de Numeracion y Criptoaritmetica PDFPriscyla AlvaradoÎncă nu există evaluări
- Baby GratisDocument6 paginiBaby GratisAdy MoralesÎncă nu există evaluări
- LIBRE DE ATADURAS ANDERSON NEIL AbusoDocument194 paginiLIBRE DE ATADURAS ANDERSON NEIL AbusoSilvia Colarte100% (3)
- GUIA - INDUCCION A LOS PROYECTOS DEL PnfaDocument51 paginiGUIA - INDUCCION A LOS PROYECTOS DEL PnfaROSIBEL100% (1)
- ONMAPS XIII 2013 Culiacán SinaloaDocument12 paginiONMAPS XIII 2013 Culiacán SinaloaDidaktica AmirÎncă nu există evaluări
- Apuntes Introduccion Al Ambiente WindowsDocument9 paginiApuntes Introduccion Al Ambiente WindowsedoaricaÎncă nu există evaluări
- Calentamiento EspecificoDocument3 paginiCalentamiento EspecificoSeymi Secy LozanoÎncă nu există evaluări
- Eje 1 Auditoría AdministrativaDocument16 paginiEje 1 Auditoría AdministrativaAngie Gonzalez EspitiaÎncă nu există evaluări
- COMENTARIO TEXTO Oposiciones SecundariaDocument2 paginiCOMENTARIO TEXTO Oposiciones SecundariaAlba Lucena Zaher100% (6)
- Guia Operativa: Cliente: Z160 Atlantis Operadora de Servicios de SaludDocument15 paginiGuia Operativa: Cliente: Z160 Atlantis Operadora de Servicios de SaludCabrera SolutionsÎncă nu există evaluări
- Investigación Aplicada - 2020 - IDocument16 paginiInvestigación Aplicada - 2020 - ILenin Barrantes LlanosÎncă nu există evaluări
- Modelos Lineales y Mejora Genetica AnimalDocument64 paginiModelos Lineales y Mejora Genetica AnimalElmer Meza RojasÎncă nu există evaluări
- Fenomeno Del Niño CosteroDocument4 paginiFenomeno Del Niño CosteroCinthya TCÎncă nu există evaluări
- Pba Ley 6021 Obras PublicasDocument14 paginiPba Ley 6021 Obras PublicasDanilo EckerdtÎncă nu există evaluări
- Test Fol.1cuatDocument22 paginiTest Fol.1cuatAlex PerezÎncă nu există evaluări
- Sistematizacion 1111111111111111111111111 CompletoDocument65 paginiSistematizacion 1111111111111111111111111 Completoanto130Încă nu există evaluări
- Dependencia Emocional y AutoestimaDocument23 paginiDependencia Emocional y AutoestimaJami SandovalÎncă nu există evaluări
- ACTIVIDAD 1 Diseño de La Estructura OrganizacionalDocument15 paginiACTIVIDAD 1 Diseño de La Estructura Organizacionalyolanda viridiana rojas graciaÎncă nu există evaluări
- Curso Bombas en Linea ELI 1a Parte Copy Split1Document12 paginiCurso Bombas en Linea ELI 1a Parte Copy Split1mauriciolapierreÎncă nu există evaluări
- Estimulación Muscular Eléctrica (EMS)Document16 paginiEstimulación Muscular Eléctrica (EMS)loren monroyÎncă nu există evaluări