Documente Academic
Documente Profesional
Documente Cultură
Tethered Polymer Layers: Phase Transitions and Reduction of Protein Adsorption
Încărcat de
TethTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Tethered Polymer Layers: Phase Transitions and Reduction of Protein Adsorption
Încărcat de
TethDrepturi de autor:
Formate disponibile
Macromol. Rapid Commun.
21, 423448 (2000) 423
Tethered polymer layers: phase transitions and reduction
of protein adsorption
I. Szleifer*, M. A. Carignano
Department of Chemistry, Purdue University, West Lafayette, IN 47907, U.S.A.
(Received: May 3, 1999; revised: August 16, 1999)
1 Introduction
Polymer molecules tethered at one of their ends to a sur-
face or interface find many applications in a variety of
fields including colloidal stabilization
1, 2)
, biocompatible
materials
37)
and drug carriers
812)
. The main role of the
tethered polymers is to change the interactions of the
modified surface or interface with the environment. The
most common application is when one desires to cover
the surface or interface with a protective steric
layer
13, 14)
. This is achieved by choosing polymer mole-
cules for which the solvent is good. Namely, the mono-
mers of the polymer prefer, effectively, to be surrounded
by solvent molecules rather than by polymer segments of
their same kind. In order for the tethered polymers to be
better dissolved in the solvent they tend to stretch out of
the surface/interface as the surface coverage of polymers
increases above a certain threshold. At high enough sur-
face coverage the polymers form what is called a polymer
brush, where the chain molecules are highly stretched out
of the surface. These highly stretched polymers are the
ones that have the potential of forming a very effective
steric barrier that protects the surface/interface.
Feature Article: The structural and thermodynamic prop-
erties of tethered polymer layers formed by spreading
diblock copolymers at a solid surface or at a fluid-fluid
interface are studied using a molecular mean-field theory.
The role of the anchoring block in determining the proper-
ties of the tethered polymer layer is studied in detail. It is
found that both the anchoring and the tethered blocks are
very important in determining the phase behavior of the
polymer layer. The structures of the coexisting phases, the
phase boundaries and the stability of the layer are found
to depend on the ratio of molecular weight between the
two blocks, the polymer-interface (surface) interactions
and the strength of the interactions between the two
blocks. The different phase transitions found are related to
experimental observations. The properties of the polymer
layers at coexistence reflect the block that is the dominant
driving force for phase separation. The ability of the teth-
ered polymer layers, under different conditions, to control
protein adsorption to surfaces is also studied. It is found
that the most important factors determining the ability of
a polymer layer to reduce the equilibrium amount of pro-
teins adsorbed to a surface are the surface coverage of
polymer and the surface-polymer interactions. The poly-
mer chain length plays only a secondary role. For the
kinetic control, however, it is found that the potential of
mean-force, and thus the early stages of adsorption,
depends strongly on polymer molecular weight. Further, it
is found that the molecular factors determining the ability
of the tethered polymer layer to reduce the equilibrium
amount of protein adsorption are different than those that
control the kinetic behavior. Comparisons with experi-
mental observations are presented. The predictions of the
theory are in very good agreement with the measured
adsorption isotherms. Guidelines for building optimal sur-
face protection for protein adsorption, both kinetic and
thermodynamic, are discussed.
Macromol. Rapid Commun. 21, No. 8 i WILEY-VCH Verlag GmbH, D-69451 Weinheim 2000 1022-1336/2000/08050423$17.50+.50/0
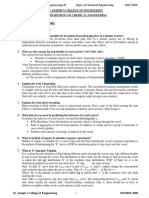
Qualitative picture of the different structures that a tethered
polymer layer may adopt. The cases shown include purely
repulsive surfaces: a) Mushroom regime, at very low surface
coverage and b) Brush regime, high surface coverage. For
surfaces with attractive interactions with the monomers of the
A block: c) Pancake regime, for low surface coverage
424 I. Szleifer, M. A. Carignano
The behavior of tethered polymer layers has been stud-
ied at length in the last twenty years. There are a large
variety of different theoretical studies that include full
scale computer simulations
1518)
, molecular theories
19)
and
analytical approaches
2022)
. There are also many experi-
mental studies, most of the early work concentrated on
measuring forces between tethered layers
13, 2325)
. How-
ever, there are now several studies on the structure of the
layers using scattering techniques
2628)
and measurements
of pressure-area isotherms
2931)
for polymers spread at
fluid-fluid interfaces.
A tethered polymer layer in good solvent can have the
following structures, qualitatively pictured in Fig. 1. At
very low surface coverage, and in the cases that the sur-
face is purely repulsive for the monomers of the chain,
the polymers are essentially isolated and form the so
called mushroom regime. At high surface coverage, the
case described above for steric repulsion, the chains are
stretched out of the surface forming the brush regime.
In the case that the tethered polymer monomers have
attractive interactions with the surface, the low density
limit is called the pancake regime and the chains are
adsorbed to the surface. For high surface coverage, there
is a small region close to the surface with high concentra-
tion of polymer segments followed by the remaining units
of the polymer chains that stretch out of the surface. It is
important to emphasize, that these regimes are not
divided by sharp boundaries and that in practice the range
of surface that they cover, as well as their existence,
depends upon the molecular weight of the polymers
among other variables. For example, it has been shown
that for polyethylene oxide (PEO) in the regime of mole-
cular weights used in biocompatible materials and drug
carriers, there is a continuous change of structure from
the mushroom to the brush
32)
. It has been also found that
PEO segments are attracted to hydrophobic surfaces and
to the water-air interface but not to lipid surfaces
30, 31, 33, 34)
.
Furthermore, many of the experimental studies are car-
ried out in the intermediate region of surface coverage
between the mushroom and the brush. Therefore, the divi-
sion in different regimes should be taken with care and be
used mostly for descriptive (qualitative) purposes.
In general, it is convenient to describe the state of the
tethered polymer layer under the generic regimes
described above. This is the approach that will be taken
throughout this paper. However, we emphasize that in our
description the words mushroom, pancake or brush
will be merely used to indicate the average structure of
the layer and not the type of theoretical approach that
should be applied to study the properties of the layer in
this or that regime. A thorough discussion of range of
applicability of different theoretical approaches in the dif-
ferent surface coverage regimes as a function of molecu-
lar weight can be found in ref.
19, 32)
One of the results that emerge from experimental stud-
ies is that, in general, it is very hard to achieve very high
surface coverage of polymer. Namely, the brush regime
of highly stretched polymers is not easily reached. One of
the reasons is that the steric barrier imposed by the teth-
ered polymer layer to other molecules also exists for the
polymer molecules that try to reach the surface. At this
point we need to discuss the different experimental meth-
odologies that have been used to build tethered polymer
layers. One approach is to functionalize one of the free
ends of the polymer with a moiety that is strongly
attracted to the surface. For example, Klein and cowor-
Fig. 1. Qualitative picture of the different structures that a teth-
ered polymer layer may adopt. The cases shown include purely
repulsive surfaces: a) Mushroom regime, at very low surface
coverage and b) Brush regime, high surface coverage. For sur-
faces with attractive interactions with the monomers of the A
block: c) Pancake regime, for low surface coverage and d)
Brush on top of a thin adsorbed layer. Diblock copolymers: The
anchoring block (dashed line) is e) completely adsorbed to a
solid surface, or f) forming a second layer at a fluid-fluid inter-
face
Tethered polymer layers: phase transitions and reduction of protein adsorption 425
kers used a zwitterionic functionalized polystyrene (PS)
to tether the polymers to mica surfaces
23, 24)
. Another
approach is to use a functionalized end of the polymer
that chemically reacts with the surface to form a strong
chemical bond. This chemisorption is much stronger than
than the physisorption using the zwitterionic end. Using
the chemical reaction approach and working with semi
dilute polymer solutions, Auroy et al.
35)
achieved very
high surface coverage of polymers. A third approach is to
use block copolymers, diblock and triblock, to form the
tethered polymer layer
13, 25, 29, 3638)
. The idea is to have one
of the blocks as the anchoring group and the other (or
others) will form the tethered layer, see Fig. 1. The use of
a polymer block as an anchoring group is very appealing
since even a relatively small attractive interaction per
segment of the anchoring block can result in many kTs of
anchoring energy for the whole block. Furthermore, after
adsorption of the anchoring block one can, in some cases,
chemically bind the adsorbed polymer segments to the
surface achieving very strong and irreversible grafting of
the polymer layer
39)
.
One of the purposes of the work presented here is to
discuss the effect of the anchoring block on the properties
of the tethered polymer layer. In general, the role of the
anchoring block was not explicitly considered in treating
the behavior of the tethered polymer layer. However, the
thermodynamic state and thus, the structure of the teth-
ered polymer layer are strongly coupled to the behavior
of the anchoring block. It will be shown that the phase
behavior and structure of the tethered layer depend upon
the interactions between the two blocks, whether the
polymer layer is at a fluid-solid (surface) or fluid-fluid
interface. The strength of these effects will turn out to be
a function of the interactions between the tethered block
and the bare surface.
Alexander
20)
and later Liguore
40)
predicted that in the
cases in which the monomers of the tethered chain have
attractive interactions with the surface there will be a first
order phase transition between the pancake and the brush
regime. Ou-Yang and Gao
41)
measured the thickness of
PEO layers tethered to polystyrene spheres and their
results seem to confirm the theoretical predictions. Bij-
sterbosch et al.
30)
and Faure et al.
31)
measured the proper-
ties of PEO tethered at the water-air interface and while
the EO monomers are attracted to the interface, they
found no evidence of the predicted phase transition. More
recently in ref.
42)
and throughout this paper, we will show
that all the experimental observations can be explained
by introducing the effect of the anchoring block into the
picture. Namely, the anchoring block turns out to be an
important determinant of the phase behavior of the poly-
mer layer.
The second aim of this paper is to describe the ability of
tethered polymer layers to prevent non-specific protein
adsorption onto surfaces. The phase behavior and the
structural properties of the tethered layer determine the
properties and interactions of the modified surface. In par-
ticular, we are interested in describing the ability of poly-
mer layers to increase the biocompatibility of materials
7)
.
This may be achieved by the prevention of adsorption of
blood proteins into the materials surface
43)
. We will show
how the equilibrium adsorption isotherms of proteins
depend upon the properties of the tethered polymer layer.
Furthermore, we will describe the changes in the kinetic
behavior of the adsorption induced by the presence of the
polymer layer. From these studies we can obtain the opti-
mal polymer layers necessary for thermodynamic and/or
kinetic prevention of protein adsorption.
The theoretical approach used throughout this work is
the single-chain mean-field (SCMF) theory and its gener-
alizations to study mixtures of polymers and proteins. This
theory was originally developed to study packing of sur-
factant chains in micellar aggregates
44, 45)
and later general-
ized to treat polymers in inhomogeneous environments
46)
.
The key idea of this theoretical approach is to look at a
central molecule, polymer and protein, with its intramole-
cular interactions exactly taken into account (within the
model system chosen to treat the molecules) and the inter-
molecular interactions are considered within a mean-field
approximation. The theory has been shown to produce
very accurate predictions as compared with full scale
molecular dynamics and Monte Carlo simulations
19, 47, 48)
,
and with experimental observations
31, 49)
. The ability of the
theory to quantitatively predict the properties of the layers
includes structural and thermodynamic properties.
Furthermore, it has been recently shown that the theory is
able to predict the adsorption isotherms of proteins from
solutions to surfaces with grafted polymers
39)
.
The SCMF theory is particularly suited to study short
and intermediate chain length molecules, up to 200300
segments. The range of applicability of the theory as well
as the reasons of why the theory is successful in a wide
range of applications can be found in recent review arti-
cles
19, 32, 50)
.
This paper is organized as follows. The next section
presents the derivation of the theory, how we apply it to
the specific case of block copolymers, and its generaliza-
tion to study protein adsorption. Section III presents a
variety of results for the phase behavior and molecular
organization of the block copolymer films. In Section IV
we show the thermodynamic and kinetic control of pro-
tein adsorption that can be achieved for the different
structures of the tethered polymer layer. Finally, Section
V contains concluding remarks with some discussion on
future directions.
2 Theoretical approach
In this section we present an overview of the theoretical
approach used throughout this work. Since several publi-
426 I. Szleifer, M. A. Carignano
cations and reviews contain all the necessary details to
carry out the calculations
19, 46)
, we will concentrate on the
specific application of the theory and the assumptions of
the model for the problems of interest here. The first part
of this section describes the theoretical approach for the
structure and thermodynamic behavior of block copoly-
mer layers. The second part is the generalization of the
theory to study the adsorption behavior, and the structural
changes, in the tethered polymer layers when they are in
contact with a protein solution.
The central quantity in the molecular theory is the
probability distribution function (pdf) of chain conforma-
tions. From the knowledge of this quantity any average
conformational and thermodynamic property can be cal-
culated. The pdf is determined by minimization of the
system free energy. Thus, we need to specify the different
entropic and energetic contributions in our model sys-
tems, then the pdf can be derived and calculations of
equilibrium properties can be carried out.
2.1 Block polymer layers
We will consider systems composed of two types of
blocks that will be called A and B. The A block is in a
good solvent environment and is the tethered block, while
the B block is the anchoring block. We will contemplate
two different anchoring mechanisms for the B block: (i)
the case of a solid surface and (ii) block copolymers
spread at a fluid-fluid interface.
In all cases we assume that the solvent of the A block is
infinitely poor for the B block and for a fluid-fluid inter-
face the solvent of the B block is infinitely poor for the A
block. This implies the assumption of an infinitely sharp
interface for both blocks. This is not a necessary assump-
tion, however, it greatly simplifies the presentation and
calculations without changing in a qualitative way any of
the main results.
For the solid surface it will be assumed that the anchor-
ing block is completely grafted to the surface. Namely,
we model it as if this block is changing the chemical
structure of the surface. Therefore, we will assume that
its role is to change the interactions between the surface
and the tethered block. However, since we will assume
that it is completely grafted, i. e. all its segments are
chemically bound to the surface, the block does not have
conformational degrees of freedom.
We are interested in the cases in which the A and B
blocks have effective repulsions between them. Therefore,
the net effect of having the B block grafted to the surface,
within our model, is to introduce a surface repulsion for
the A segments that will be proportional to the surface cov-
erage, i. e. to the number of B segments on the surface.
We can now write the energetic contribution to the free
energy due to the A and B blocks for the case in which
the B block is grafted onto a solid surface. We consider
first three contributions:
1. The A-A attractions, which represent effectively the
quality of the solvent. We define a constant (negative)
interaction parameter e
AA
, and then the temperature, T,
is the relevant control variable. Since we are interested
in good solvent conditions for the tethered block we
will have kT A [e
AA
[. Within a mean-field approxima-
tion and accounting for the inhomogeneous distribu-
tion of A segments as a function of the distance from
the surface, the total A-A interaction per polymer chain
has the form
E
AA
=
1
2
Z
v
0
Z
v
0
e
AA
pn
A
(z)Ppb
A
(z9)Pdz dz9; (1)
where pn
A
(z)Pdz is the average number of segments of
the A block at a distance z from the surface. Distance z
refers here and throughout to the layer between z and
z + dz. pb
A
(z9)P is the average volume fraction of seg-
ments of type A at distance z9 from the interface. The
integral over z is to account for all the segments of the
central chain and that over z9 to account for the mean-
field of A monomers interacting with the central chain.
In reality the parameter e
AA
arises from the integration
of the van der Waals interactions. The procedure is
described in detail in ref.
47)
In case of athermal sys-
tems (good solvent regime) this contribution is not
included in the free energy.
2. The A-surface interactions. This is the direct interac-
tion between the A segments and the bare surface. We
assume that the surface exerts an interaction with a
square well potential to the A segments with attractive
strength e
AS
and the range of the interaction is d. The
total interaction per block is
E
AS
=
Z
d
0
e
AS
pn
A
(z)Pdz : (2)
3. The interaction between A and the surface bound B
segments. This is a repulsive interaction and depends
on the number of B segments present on the surface.
We assume that the range of this repulsive interaction
is the same as that of the A bare surface attraction, i. e.
d, and the strength of the interaction is e
AB
. The repul-
sive interaction per tethered chain molecule is
E
AB
=
Z
d
0
e
AB
N
pol
n
B
pn
A
(z)Pdz; (3)
where n
B
is the number of segments of the anchoring
(B) block and N
pol
is the number of polymer molecules
on the surface. For convenience we define an effective
interaction parameter by multiplying e
AB
by the total
area of the surface and the number of B segments in
the tethering block. Thus, the repulsive interaction
term becomes
Tethered polymer layers: phase transitions and reduction of protein adsorption 427
E
AB
= kT
Z
d
0
v
AB
rpn
A
(z)Pdz ; (4)
with v
AB
= e
AB
Rn
B
=kT, and r = N
pol
=R is the surface
coverage of polymer, with R being the total area of the
surface.
The free energy of the system includes the energetic
contributions just described and the following three entro-
pic contributions:
1. The conformational entropy of the A block. For each
A block we have
S
A
= k
X
a
P(a)lnP(a) ; (5)
where the sum runs over all the conformations of the
A chains.
2. The translational entropy of the polymer molecules.
This term is of the form (per chain molecule)
S
trans
= k ln(rl
2
); (6)
where l is the length of the A segment. Note that rl
2
is
unitless.
This term will not be present in the free energy if the
B blocks are chemically grafted to the surface. How-
ever, it is needed for those cases in which the chains
are mobile.
3. The translational entropy of solvent molecules.
Namely, the entropy per solvent molecule at z is
S
solv
(z) = k lnb
s
(z) ; (7)
where b
s
(z) is the solvent volume fraction at z.
The total free energy of the system is obtained by mul-
tiplying the polymer contribution by the number of chain
molecules and integrating the solvent contribution over
all z (this is equivalent to summing over all solvent mole-
cules).
Before we write the total free energy we emphasize
again that in this case of a solid surface we are assuming
that the only role played by the B blocks is to modify the
surface such that there is a repulsive term as expressed in
Eq. (4). Namely, the B blocks are grafted to the surface
without having conformational degrees of freedom.
It is convenient to write the free energy density, i. e. the
free energy per unit area of the surface. Further, the most
appropriate ensemble for this system is a semi grand-
canonical, which is canonical for the polymer chains and
grand canonical for the solvent molecules
51)
. The total
free energy per unit area is then
W
A
R
= r
1
2
E
AA
E
AS
E
AB
rTS
A
Z
b
solv
(z)
5
s
TS
solv
l
solv
( )dz ; (8)
where l
solv
is the solvent chemical potential that must be
constant at all z for thermodynamic equilibrium and 5
s
is
the volume of the solvent molecule. We have excluded
the translational entropy of the polymer molecules
because they are assumed to be chemically grafted to the
surface by the B blocks.
Inspection of the different contributions to the free
energy reveals that we are missing a repulsive term
between the molecules in the system. This term is
included as packing constraints. Namely, we assume that
between any two segments there are hard core repulsive
interactions and that the available volume is completely
occupied by solvent or polymer segments, i. e. incompres-
sibility assumption. The incompressibility assumption is
not really needed as has been shown in ref.
52)
However,
using this approximation does not modify the results in a
qualitative way for the systems of interest here and it is
convenient for computational purposes.
The packing constraint reads
pb
A
(z)P b
s
(z) = rpn
A
(z)P 5
0
b
s
(z) = 1; (9)
where the condition is imposed at all zs since this is the
inhomogeneous direction. 5
0
(=5
s
) is the volume of the
monomer. Only the A segments of the polymer and the
solvent contribute because we assume that the solvent is
infinitely poor for the B segments.
Now we have a free energy which is a functional of
b
s
(z) and the pdf of chain conformations P(a). To deter-
mine the pdf and the solvent density profile we minimize
the free energy, Eq. (8), subject to the packing con-
straints, Eq. (9). The minimization is carried out by intro-
ducing a set of Lagrange multipliers bp(z) conjugated to
the packing constraints. We obtain for the pdf of chain
conformations
P(a) =
1
q
exp
b
Z
p(z)n
A
(z; a) dz
v
AA
Z Z
n
A
(z; a)pb
A
(z9)P dz dz9
v
AS
Z
d
0
n
A
(z; a) dzv
AB
r
Z
d
0
n
A
(z; a) dz
; (10)
where all the interaction parameters have been scaled by
the temperature, i. e. v
i
= be
i
and q is a normalization
constant (single chain partition function). The first term
in the exponential represents repulsive interactions
between the chain in conformation a and the other poly-
mer and solvent molecules. The second represents attrac-
tive interactions between the A segments or in other
words is the one representing the quality of the solvent.
The third term corresponds to interactions between bare
surface and A segments, and the last term corresponds to
the B-induced repulsions of A segments with the surface.
The solvent density profile is given by
b
s
(z) = exp bp(z)5
0
bl
solv
[ [: (11)
428 I. Szleifer, M. A. Carignano
The last equation enables us to understand the physical
meaning of the Lagrange multipliers. They are related to
the local (inhomogeneous) osmotic pressure necessary in
order to fulfill the thermodynamic condition of constant
solvent chemical potential at all distances from the sur-
face. Thus, the inhomogeneous pressure profile is a mani-
festation (or a result) of the inhomogeneous distribution
of solvent and polymer segments as a function of the dis-
tance from the surface. The lateral pressures, p(z), can
also be obtained from expansion of the systems partition
function, this is shown in detail in ref.
46)
The only unknowns to determine pdf and solvent den-
sity profiles are the lateral pressure profiles. These are
obtained by introducing the explicit expressions for the
pdf, Eq. (10), and the solvent density profile, Eq. (11),
into the constraint equations, Eq. (9). Then the input
necessary to solve for lateral pressures are: (i) the set of
single chain conformations of the A block, (ii) interaction
parameters v
AA
; v
AS
and v
AB
, (iii) grafting density r and
(iv) the value of the solvent chemical potential. It turns
out that the value of l
solv
is not necessary to solve the
equations due to the incompressibility assumption, see
ref.
53)
Introducing the input into the constraint equations we
end up with a set of non-linear coupled equations that can
be solved in a straightforward way by standard numerical
methods. It is important to emphasize that the set of sin-
gle chain conformations needs to be generated once and
then the same set is used for all the calculations for differ-
ent values of surface coverage and the several interaction
parameters. The output of the theory provides quantita-
tive information on how the weight of the different con-
formations changes depending upon the thermodynamic
state of the system. Thus, all the results shown below for
each polymer molecular weight have been obtained from
the same set of single chain configurations. As it will be
seen, depending on the interaction parameters and the
surface coverage of polymer the theory is able to shift the
relative weight of the different conformations. This
results in average properties that range from a fully
adsorbed layer to a highly stretched brush.
Once we know the lateral pressure profile we can cal-
culate any desired average conformational and thermody-
namic property. For example, by replacing the pdf,
Eq. (10), and the solvent density profile, Eq. (11), into the
free energy, Eq. (8), using the explicit forms for the ener-
getic and entropic contributions, Eq. (1, 2, 4, 5, 7)
respectively, we obtain
b
W
A
R
=
Z
v
0
bp(z) dz
r
2
Z
v
0
Z
v
0
v
AA
pn
A
(z)P pb
A
(z9)P dz dz9 r lnq: (12)
The total surface pressure, which can be used to com-
pare with experimental observations and to determine
phase equilibrium, is obtained by differentiating the free
energy with respect to the area. Namely,
bP =
qW
A
qR
N
pol
;Ns;T
=
Z
v
0
bp(z) dz
r
2
Z
v
0
Z
v
0
v
AA
pn
A
(z)Ppb
A
(z9)P dz dz9
r
2
Z
v
0
v
AB
pn
A
(z)P dz rN
A
: (13)
Note again that there is no translational term since it is
assumed that the polymers are chemically grafted to the
surface.
The discussion up to this point has been concentrated
on the case of polymer molecules grafted by the B block
to a surface. We now generalize the description to the
case where the block copolymers are spread at a fluid-
fluid interface. All the contributions discussed above are
part of this new system however, two more contributions
need to be considered. First, the translational entropy
term, Eq. (6), must be included because the polymers are
mobile on the interface. Second, the B blocks have now
conformational degrees of freedom and interactions with
their own solvent.
Therefore the free energy of the B block will be
b
W
B
R
= r
X
c
P(c) lnP(c)
r
2
Z
v
0
Z
v
0
v
BB
pn
B
(z)P pb
B
(z9)P dz dz9; (14)
where c represents the set of configurations of the B
chains. We will assume for simplicity that there are no
attractive interactions between B segments and the sur-
face, and AB (surface) repulsions are already accounted
for in the contributions from the A term, see Eq. (4).
At this point it is important to make another distinction
between this case and that of the solid surface. Expression
(4) was derived assuming that all the B segments are on
the surface. In the case of a fluid-fluid interface the num-
ber of B segments in direct contact with A, i. e. those that
are in the close vicinity of the interface, changes depend-
ing upon the thermodynamic state of the system. For sim-
plicity, and as it will be discussed below due to the parti-
cular cases that we are interested in here, we will assume
that v
AB
is constant. The main reason is that the change in
the number of B segments is not very large as the surface
coverage changes since we are only treating the case in
which the interface is not attractive to the B segments.
Therefore, there is a depletion of B segments from the
interface that will not increase dramatically if we addi-
tionally consider AB repulsion. From the technical point
of view, this approximation implies that the free energies
of A and B are additive and therefore the solution is much
simpler than in the fully interacting case.
The pdf of B chains is obtained along the same lines as
that for A, i. e. we consider volume filling constraints for
Tethered polymer layers: phase transitions and reduction of protein adsorption 429
B and its solvent, and then we minimize the free energy
subject to the packing constraint and obtain for the pdf
P(c) =
1
q
B
exp
Z
0
v
bp(z)n
B
(z; c) dz
Z
0
v
Z
0
v
v
BB
n
B
(z; c)pb
B
(z9)P dz dz9
; (15)
and for the solvent density profile an expression identical
to Eq. (11). Note that the lateral pressures here are differ-
ent than those for the A block. Further, we will only con-
sider the case in which the solvent for B is poor, see
below.
The B block in the case of fluid-fluid interface contri-
butes to the free energy the following terms
b
W
B
R
=
Z
0
v
bp(z) dz
r
2
Z
0
v
Z
0
v
v
BB
pn
b
(z)P pb
b
(z9)P dz dz9 r lnq
B
r ln rl
2
: (16)
And the contribution to the pressure is
bP =
qW
B
qR
=
Z
0
v
bp(z) dz
r
2
Z
0
v
Z
0
v
v
BB
pn
B
(z; c)P pb
B
(z9)P dz dz9 rN
B
r: (17)
The total free energy and pressure for the block copoly-
mer at the fluid-fluid interface is obtained by adding
Eq. (16) to (12) and (17) to (13), respectively.
The Results section will show that the inclusion of the
contribution from both blocks are necessary to explain
the different experimental observations in a variety of
systems. We will show that there are several types of
phase transitions and the phases at equilibrium have dif-
ferent average structures, depending upon the type of
interaction that dominates in each phase. Furthermore,
we will demonstrate how the ability of the different
phases to prevent protein adsorption, both thermodynami-
cally and kinetically, depends upon the structural proper-
ties of the tethered block.
The technical details of how the conformations of the
chains are generated and how the calculations are carried
out can be found in ref.
19, 53)
In the results shown below
the set of single chain conformations for the tethered
chains is obtained using the rotational isomeric state
model. The use of this chain model with the theory pro-
vides excellent quantitative agreement with a variety of
experimental systems
19, 31, 32, 39)
.
2.2 Tethered layer in contact with protein solution
We consider protein adsorption onto solid surfaces.
Therefore, the contribution to the free energy from the
polymer layer is as described in Eq. (8). We now add the
contribution from the protein molecules. There is an
important difference between the contribution to the free
energy of the protein and that of the polymer chain. This
is that the proteins come from a bath (the solution) and
thus, we need to consider the protein in the grand canoni-
cal ensemble. Further, we do not know the distribution of
the protein molecules as a function of the distance from
the surface. The z dependent density of proteins,
q
pro
(z) = N
pro
(z)=R, is one important quantity that we
want the theory to be able to predict. In particular q
pro
(0)
provides the number of proteins adsorbed at the surface.
We consider a simple model protein for which the sol-
vent and the tethered polymer chains exert only repulsive
interactions. Effectively, this implies that the solvent-pro-
tein, protein-polymer, protein-protein attractions are all
equal. The contribution of the protein to the free energy
includes:
1. The z dependent conformational entropy of the pro-
tein. This term has the form
S
conf ; pro
(z) = k
X
k
P
pro
(k; z) ln P
pro
(k; z): (18)
2. The z dependent translational entropy of the proteins.
S
tran; pro
(z) = k ln(q
pro
(z)l
3
): (19)
3. The bare interaction of the protein with the surface,
U
pro-s
(z).
4. The repulsion between the protein and the surface
bound segments of the B block (anchoring block).
This term has the form (total contribution)
E
pro-B
=
Z
d
0
Z
v
pro-B
rq
pro
(z)pn
pro
(z9; z)P dz9 dz; (20)
where, as before, we assume that the range of this
interaction is d and the interaction parameter is given
by v
pro-B
= e
pro-B
Rn
b
=kT, see Eq. (4). pn
pro
(z9; z)P dz is
the average number of interacting sites that a protein
at (reference) position z9 has at distance z from the sur-
face. For the simplified protein model that we use (see
below), we have pn(z9; z)P = d(z z9), and Eq. (20)
reduces to
E
pro-B
=
Z
d
0
v
pro-B
rq
pro
(z) dz : (21)
5. The repulsive interactions between the proteins and
the other molecules in the system. Namely, the solvent
and the tethered polymers. These are accounted for by
generalizing the constraint equations to read
rpn(z)P5
0
Z
q
pro
(z9)p5
pro
(z9; z)P dz9 b
s
(z) =1; (22)
where the integral over the protein densities is necess-
ary to include all the volume contributions that pro-
430 I. Szleifer, M. A. Carignano
teins at different z9 make to z. p5
pro
(z9; z)P dz is the aver-
age volume that proteins at z9 contribute to z. q(z9)
denotes the number of proteins per unit volume that
their point of closest proximity to the surface is z9.
The total free energy per unit area of the tethered poly-
mer-protein-solvent system is given by
W
R
= r(E
AS
E
AB
TS
A
) E
pro-B
Z
q
pro
(z)[U
pro-s
(z)
TS
conf ;pro
(z) TS
trans;pro
(z) l
pro
[ dz (23)
where the last term appears because we are treating a
grand canonical ensemble for the proteins.
The pdf of tethered polymers, the z dependent pdf of
the proteins, the protein density profile, q
pro
(z), and the
solvent density profile are obtained by minimization of
the free energy density, Eq. (23), subject to the packing
constraints, Eq. (22).
The expressions for the pdf of the tethered chains and
that for the solvent density profile are identical to the
ones derived above, Eq. (10, 11), respectively. The main
difference is that now the lateral pressures, p(z), will be
determined in a system that includes the proteins as it
will be manifested in the packing constraints, Eq. (22),
that are necessary to quantify the Lagrange multipliers.
The minimization gives for the z dependent pdf of the
proteins,
P(k; z) =
1
q
pro
(z)
exp
bU
pro-s
(z) v
pro-B
rH(z)
Z
bp(z9) 5
pro
(z9; z) dz9
; (24)
where H(z) = 1 if z f d and zero otherwise, and
q
pro
(z) =
X
k
exp[bU
pro-s
(z) v
pro-B
rH(z)
Z
bp(z9) 5
pro
(z9; z) dz9[ (25)
is the normalization constant for each z. The first term in
the exponential of the pdf arises from the surface-protein
attractions, the second are the surface-protein repulsions
induced by the presence of the B segments and the third
contains the intermolecular repulsions.
The density profile of the proteins is given by
q
pro
(z)l
3
= e
bl
pro
q
pro
(z): (26)
This last equation shows the interplay that determines
the amount of proteins that will adsorb. Note that thermo-
dynamic equilibrium requires the chemical potential of
the proteins to be the same at all z. Arranging Eq. (26) we
get that
bl
pro
= ln
q
pro
(z)l
3
q
pro
(z)
: (27)
Therefore in order to have a strong adsorption we need
the partition function of the protein at the surface to be
large. This can be achieved if the surface-protein attrac-
tion is strong, see Eq. (25). However, a large concentra-
tion of proteins on the surface makes the lateral repul-
sions, i. e. p(z), very large too. Therefore, it is the balance
between the two that determines the amount of protein on
the surface for a given bulk concentration. Furthermore,
the presence of tethered polymers further increases the
lateral pressures close to the surface and thus decreases
the amount of protein adsorbed. This interplay depends
upon many factors as will be shown in the results section.
The only unknowns to determine the two pdfs (protein
and tethered polymer) and the two density profiles (pro-
tein and solvent) are the lateral pressures p(z). They are
numerically obtained by replacing Eq. (10, 11, 24, 26) into
the constraint equations, Eq. (22). The input necessary to
solve these equations are: the set of single chain confor-
mations for the polymer chains, the set of single chain
conformations for the proteins, the surface coverage of
polymer, the chemical potentials of the solvent and the
protein and the interaction parameters, including the bare
surface-protein interactions. Note again, that in order to
solve for all the different conditions the set of conforma-
tions for the tethered polymers and the proteins need to
be generated only once.
In practice, the resulting equations are solved by dis-
cretization of space replacing the integral equations into a
set of coupled non-linear equations for the lateral pres-
sures. The technical details, including detailed equations,
can be found in ref.
54, 55)
For simplicity we assume that the protein in bulk has a
single configuration but it can denaturate upon contact
with the surface. See section on results of proteins.
3 Results
All the results presented in this section are for generic
polymers, i. e. we use a generic chain model and interac-
tion parameters that may represent a large variety of pos-
sible block copolymers. We have recently shown that
with the appropriate choice of interaction parameters and
chain model, there is very good agreement between the
theoretical predictions and experimental observations for
pressure area isotherms of PS-PEO spread at the water-air
interface
31)
and for adsorption isotherms of proteins on
surfaces with PEO-PPO-PEO triblock copolymers
39)
.
However, the objective of this section is an attempt to
show the variety of possible structures and phase transfor-
mations that can be found under different experimental
conditions and how those structures may be used to pre-
vent protein adsorption. Therefore, we present the calcu-
lations for generic models of polymers and proteins and
discuss the relationship with experimental systems for the
different cases.
Tethered polymer layers: phase transitions and reduction of protein adsorption 431
The first part of this section concentrates on the proper-
ties of the layers themselves, including the structure and
phase behavior. After that we devote our attention to the
ability of the polymer layers to interact with proteins free
in solution.
3.1 Pressure area isotherms and phase behavior on
fluid-fluid interfaces
We first consider diblock copolymers spread at fluid-fluid
interfaces. The case of solid surfaces will be considered
below. Several experimental systems have been studied
such as PS-PEO
30, 31)
and other nonionic diblock copoly-
mers
56, 57)
, as well as PS-PVP
37, 38)
(PVP is poly(vinylpyri-
dinium) which is a polyelectrolyte) at water-air inter-
faces. For the PS-PEO diblock it has been found that
monomers of PEO have an effective attractive interaction
with the interface. This interaction is responsible for hav-
ing the pressure-area isotherms show a plateau-like
region. However experimentally, a first order phase tran-
sition was not found
30, 31)
. Furthermore, both groups
30, 31)
have presented theoretical predictions that show that the
attraction of PEO monomers to the interface is not
enough to have a first order phase transition. This is in
contrast to earlier predictions of Alexander
20)
and of
Liguore
40)
who suggested that tethered polymer layers in
which the monomers are attracted to the surface/interface
should show a first order phase transition between a pan-
cake like structure (2-D adsorbed layer) at low surface
coverage and a stretched like brush configuration of high
(or moderate) surface coverage. As it has been recently
shown, and reviewed below, we predict the presence of
phase transitions only when the other block is taken into
consideration and we will show that different type of
phase transitions may occur.
Several other diblock molecules at the water-air inter-
face were extensively studied by Eisenberg and cowor-
kers
37, 38, 56, 57)
. They have shown the presence of aggre-
gates or domain formation at the interface. These aggre-
gates may be two dimensional micelles or they also may
indicate coexistence between two phases. The pressure
area isotherms in the same systems exhibit a very well
defined plateau which indicate an apparent first order
phase transition, and transmission electron micrographs
show the formations of surface micelles. Our theoretical
studies presented below concentrate only on the case of
macroscopic phase transition and the possibility of aggre-
gate formation on the surface has not been considered
(see below).
We will attempt to consider a large variety of systems
to see under what conditions one should expect one type
of behavior or another. For all the diblock copolymers at
a fluid-fluid interface we consider the B block to be in a
poor solvent environment, i. e. the effective solvent tem-
perature is below the h temperature for that solvent-poly-
mer mixture. We consider that case because that was
found to be a very good description of PS blocks at the
air side of water-air interfaces. For the A block the solvent
is good, however different segment-interface interactions
will be studied.
The first case that we consider is that in which the A
block does not have any attractive interactions with the
Fig. 2. Pressure area isotherms, the lateral pressure as a func-
tion of the area per molecule, a = R=N
pol
. The A block is in a
good (athermal) solvent, and the B block is in a poor solvent,
T=H = 3/5 (the interaction parameters are the same as in ref.
47)
).
Both blocks (A and B) have purely repulsive interaction with the
interface. In the upper figure, we show the contribution from the
A block for three different chain lengths n
A
: 50 (dotted), 75
(dashed) and 100 (long dashed) segments. The lower figure
shows the contribution from the B block of 30 segments (solid)
and the total pressure of the diblock for the three possible A-B
combinations. A long enough A block stabilizes the layer at any
surface coverage. In this and the following figures we use the
molecular parameters for the chains that best fit the experimen-
tal pressure-area isotherms of PS-PEO at the air-water inter-
face
31)
. However, the results are also valid for generic diblock
copolymers under the same conditions
432 I. Szleifer, M. A. Carignano
interface, i. e. the interface is purely repulsive for both A
and B. Fig. 2 shows the pressure-area isotherms for each
of the blocks and their sums for a fixed chain length of
the B block and a variety of lengths for the A block. (For
the individual contributions to the pressure, the B block
includes the translational entropy.) The isotherm of the B
block shows a van der Waals loop characteristic of a first
order phase transition. The behavior of tethered polymer
layers in poor solvent has been described in several stu-
dies
28, 47, 5861)
. The pressure of the A block is always repul-
sive and it is the more repulsive the longer the chain
length. When the two contributions are added together,
for short chain lengths of the A block there is a slight shift
of the van der Waals loop but still there is coexistence
between two phases. For large enough A blocks the repul-
sive contribution of the stretching of the A block is
enough to overcome the attraction of the B block. As a
result, there is no more van der Waals loop and the
diblock layer is stable at any surface coverage.
It will be interesting to determine the necessary mole-
cular weight of A block that will stabilize the B block, i. e.
that will make the polymer layer stable at any surface
coverage. Clearly, this will depend on the molecular
weight of the B block. However, even the ratio of molecu-
lar weights will be meaningful only if it is found as a
function of the solvent-B interaction, i. e. quality of sol-
vent or effective temperature for the B block. Therefore,
the best way to obtain this information is by looking at
the whole phase diagram in the plane of temperature
(quality of solvent) vs surface coverage. This is shown in
Fig. 3 for A-B diblock copolymers at fluid-fluid interfaces
with fixed chain length of the B block and a variety of A
molecular weights. The effect of increasing the molecular
weight of the A block is to stabilize the polymer mono-
layer. The longer the A chain length the lower the critical
temperature, and the binodal is narrower.
Fig. 4 shows the phase diagrams for a longer (fixed) B
block. The shape and qualitative features of the phase
diagrams are the same as those in Fig. 3. It is clear that in
order to have the same degree of stabilization, i. e. scaled
critical temperature, for a longer B block a much longer A
block is necessary.
To summarize the ability of the A block to stabilize the
monolayer, Fig. 5 shows the (scaled) critical temperature
as a function of the ratio of chain length between the A
and B blocks. The two different B block systems show
very similar scaled critical temperature as a function of
the ratio of molecular weights. The relationship seems to
be linear. We do not have an explanation for the linear
relationship found in our results. However, this curve
may be very useful in the design of experimental systems
that are stable at all surface coverage. The only input
necessary is the critical temperature of the pure B block
forming a monolayer. While this is not a system that can
be realized experimentally (no anchoring group to the
interface) the critical temperature of the monolayer of
Fig. 3. Phase diagrams for the A-B diblock copolymer at a
fluid-fluid interface. The phase diagram is the binodal in the
temperature-surface coverage plane. Namely, the curves are the
onset of points that represent for each temperature the two sur-
face coverage values at coexistence. Inside the binodal, the sys-
tem separates into two phases with the surface coverage of the
binodal at the given temperature. The length of the B block is
n
B
= 30 for all cases. The length of the A block is: 0 (solid line),
50 (dotted line), 100 (dashed line) and 150 (long dashed line).
The temperature is scaled by the critical temperature of a pure
B-block monolayer
Fig. 4. Phase diagrams for the A-B diblock copolymer at a
fluid-fluid interface. The length of the B block is n
B
= 50 for all
cases. The length of the A block is: 0 (solid line), 50 (dotted
line), 100 (dashed line) and 150 (long dashed line)
Tethered polymer layers: phase transitions and reduction of protein adsorption 433
pure B can be related to the bulk critical temperature and
to the h temperature of the B homopolymer
47)
.
We now consider what is the structure of the phases at
equilibrium in the two phase region. To understand the
origin of the different average molecular structures, it is
necessary to keep in mind that the driving force for the
phase separation is the fact that the B block is in a poor
solvent environment. Therefore, one should expect the
dilute phase to have the B block as small, compact, single
chains, while the more concentrated phase is the one in
which the B block is trying to have as much contact with
other B blocks as possible, i. e. in both phases the B block
minimizes as much as possible the contact with solvent.
This is shown in the two upper graphs of Fig. 6 (pure B
monolayer), the left profile shows the dilute regime
(small compact chains) while the right one shows the
concentrated branch (laterally stretched chains). The
other four figures show the structure of the whole
diblock, all at the same temperature but for two different
chain lengths of A blocks. The A block structure has the
typical features of a tethered polymer layer in good sol-
vent, a small depletion region very close to the interface
followed by a stretched chain. The degree of stretching of
the A block is much larger on the concentrated side of the
coexistence curve (right graphs) due to the larger concen-
tration of chains in the good solvent regime.
The difference in the B block structure in the dilute
(concentrated) branch is that increasing the chain length
of the A block increases (decreases) the surface coverage
at coexistence, thus resulting in a higher (lower) volume
fraction of B segments, but always keeping the shape
determined by the quality of solvent.
We summarize the case in which the B block is in poor
solvent conditions, the A block is in a good solvent envir-
onment, and the interface does not attract either of the two
blocks. We find that if the A block is large enough there is
stabilization of the monolayer at any surface coverage. For
A blocks that are smaller or of the same size of the B block,
our findings show that there is coexistence between two
phases driven by the poor quality of the solvent for the B
block. The main role of the A block is to shift the critical
temperature (and the whole phase diagram) towards lower
temperatures due to the addition of the A-A repulsions. We
find an empirical linear relationship between the scaled
critical temperature of the diblock and the ratio of chain
lengths of the two blocks. This relationship may be very
useful in the experimental design of stable diblock mono-
layers spread at fluid/fluid interfaces. The structure of the
monolayers is that of a tethered chain in the poor solvent
regime for the B block attached to one in the good solvent
regime for the A block.
We now consider the case in which the A block has
attractive interactions with the interface. All the other
conditions remain the same as the systems described
above. Namely, the solvent is poor for the B block and
good for the A block but now the A monomers are
attracted to the interface. This has been recently shown to
be the case for PS-PEO at the water-air interface where
the predictions of the theory show very good quantitative
agreement with the experimentally measured pressure-
area isotherms. We shortly review the findings of that
work and then extend the calculations presented there to
other systems. The PS-PEO diblocks studied in ref.
31)
had
a relatively short PS block and a longer PEO block. The
pressure-area isotherm showed a plateau-like region and
it was found that the origin of the plateau was not a phase
transition but the result of the attraction of the PEO block
to the water-air interface. Similar conclusions were drawn
by the Wageningen group
30)
. The reason for the attraction
of EO segments to the interface is the amphiphilic nature
of the CH
2
1CH
2
1O group. The fact that these monomers
are soluble in water does not eliminate the hydrophobic
nature of the methylenic groups.
The structure of the PEO block in the dilute regime
was found to be that of an adsorbed mushroom. As the
surface coverage of the diblock is increased some of the
segments of the PEO desorb from the surface and solubi-
lize into the water forming a brush whose effective chain
length is shorter than that of the PEO block due to the
adsorbed segments. The structure of the PS block is basi-
cally the same as shown above, namely a tethered layer
in a poor solvent regime.
The studies on ref.
31)
were done for a relatively short
PS block and the PEO block was longer in all cases.
Fig. 5. The critical temperature of the diblock copolymer
layer, scaled by the critical temperature of a monolayer of pure
B blocks, as a function of the ratio of molecular weights between
the A and B blocks. Circles correspond to n
B
= 50 and squares to
n
B
= 30. The straight line is the best fit to all the points, which
gives T
c;AB
=T
c;B
= 1 0.0454 n
A
=n
B
434 I. Szleifer, M. A. Carignano
Here, we extend those studies to a longer PS block and a
larger range of PEO chain lengths. Throughout the fol-
lowing discussion we will refer to the A block as PEO
and to the B block as PS because our predictions are in
quantitative agreement with experimental observations in
that particular system. However, the qualitative features
presented are generic for the case of a B block in a poor
solvent environment and the A block in a good solvent
environment with attractions to the interface.
Fig. 7 shows the contribution to the pressure-area iso-
therms for the PEO block. The main differences com-
pared to pressure area isotherms of the A block that is not
attracted to the interface (see Fig. 2) are as follows: The
isotherms for the blocks with attractive interactions with
Fig. 6. Polymer density profiles, variation of polymer segment volume fraction as a function of the distance
from the tethering surface, for B (solid line, n
B
= 30) and A (dotted line) blocks, at the surface coverage corre-
sponding to the coexistence phases for T=T
c;B
= 0.86. Plots on the left correspond to the dilute phase and those
on the right are for the concentrated phase (note the different scale). The top set is for pure B block, the set in
the center corresponds to n
A
= 50, and the one on the bottom is for n
A
= 75
Tethered polymer layers: phase transitions and reduction of protein adsorption 435
the interface show a kink that arises at the area per
molecule at which the completely adsorbed polymers
have strong enough (two dimensional) lateral repulsions
that some of the segments start to solubilize into the sol-
vent. This change of slope, which is responsible for the
plateau-like shape of the isotherms, is found to appear at
larger areas as the PEO chain length increases. The rea-
son is that the adsorbed two dimensional blocks have lar-
ger excluded areas as their chain length increases, i. e.
longer PEO blocks show a larger value of the area for the
kink in the pressure. The change of position of the kink
results in a very rich phase behavior as will be shown
next.
Fig. 8ac show the pressure-area isotherm for the
diblock copolymers. The upper graph in each case shows
the individual contribution to the pressure from each of
the two blocks, while the lower graph shows the total
pressure. Comparing the pressure-area isotherms of the
three graphs, it is clear that there is a qualitative change
in the shape of the isotherms. The shortest chain lengths
of PEO (Fig. 8a) seem to have a similar effect on the
pressure-area isotherm as in the case of no attractions of
the A block to the interface, see Fig. 2. The only differ-
Fig. 7. Pressure-area isotherms for the A block with attractive
interactions with the surface (e. g. PEO at the air-water inter-
face). Chain lengths are: solid line (n
A
= 25), dotted line
(n
A
= 40), dashed line (n
A
= 50), long dashed line (n
A
= 60), dot-
dashed line (n
A
= 75), solid line-circles (n
A
= 100), dotted line-
squares (n
A
= 125) and dashed line-diamonds (n
A
= 150)
(a) (b)
436 I. Szleifer, M. A. Carignano
ence being the larger contribution to the pressure due to
the stronger repulsions in the PEO case as compared to
the case shown in Fig. 2.
For the intermediate PEO chain lengths shown
(Fig. 8b), there is a big shift in the position of the van der
Waals loop, compare the areas of the loop with those of
Fig. 2. The reason for the shift is the position of the kink
in the pressure of the PEO block. The area per molecule
at which the kink appears increases as the molecular
weight of the tethered chain increases. Finally, for the
longest PEO chains considered here (Fig. 8c), there is a
shift in the position of the van der Waals loop, but there is
also a change in the shape of the loop. Again, this is the
direct result of combining the contribution of the PS
block, which is fixed in all the cases, with the pressure
contribution of the PEO block that due to the presence of
the kink shifts the position and shape of the loops depend-
ing upon the molecular weight of the PEO block.
It is clear that the shift in the van der Waals loop caused
by the kink in the pressure of the PEO block will depend
upon the temperature, i. e. the quality of the solvent for
the PS block. To summarize the effect, Fig. 9 shows the
phase diagram for a variety of PEO molecular weights for
a fixed chain length of PS. The figure is divided into three
graphs in order to have a clearer picture of the dramatic
changes in the phase diagram caused by the location of
the kink in the PEO pressure as compared to the original
van der Waals loop of the pure PS.
For the shortest PEO blocks, the main role of the PEO
is to stabilize the layer. In other words, the critical tem-
(c)
Fig. 8. Pressure-area isotherms for PS-PEO at the air-water
interface. PEO is of the type shown in Fig. 7. Individual contri-
butions from each block are in the upper plots. Total pressures
are shown in the lower plots. In all the cases, the PS (B) block
has 50 segments (upper plots, solid line). (a) short PEO chain
length: dotted line (n
PEO
= 25), dashed line (n
PEO
= 40), long
dashed line (n
PEO
= 50). The inset shows the maximum of the
total pressure, and its decay to zero for very large areas; (b)
intermediate PEO chain length: dotted line (n
PEO
= 50), dashed
line (n
PEO
= 60), long dashed line (n
PEO
= 75); (c) long PEO
chain length: dotted line (n
PEO
= 100), dashed line (n
PEO
= 125),
long dashed line (n
PEO
= 150)
Fig. 9. Phase diagrams for PS-PEO systems. In all the cases,
chain length of the PS block is 50 segments, and the temperature
is scaled by the critical temperature of the pure PS layer. PEO
chain lengths are as follows. Upper figure: Solid line (n
PEO
= 0),
dotted line (n
PEO
= 25), dashed line (n
PEO
= 40). Intermediate fig-
ure: Solid line (n
PEO
= 50), dotted line (n
PEO
= 60), dashed line
(n
PEO
= 75). Lower figure: Solid line (n
PEO
= 100), dotted line
(n
PEO
= 125), dashed line (n
PEO
= 150)
Tethered polymer layers: phase transitions and reduction of protein adsorption 437
perature is lower than in the pure PS layer. Note however,
that the attractive interaction of the PEO segments with
the interface results in a stronger stabilization than for the
equivalent molecular weight but without the attractive
interaction, see Fig. 4. PS-PEO (50-40) already shows a
phase diagram that is different in shape than the shorter
chain lengths. This effect is more dramatic for 50-50
where the phase diagram (middle graph) shows two criti-
cal points.
The presence of the second critical point can be under-
stood by looking at the pressure-area isotherm of the 50-
50 diblock. This is shown in Fig. 10. The competition
between the different slopes of the PS pressure and the
PEO pressure results in double minima for a small range
of temperatures. The interesting result is the role of the
PEO block to stabilize both the very dilute and the con-
centrated regimes. Namely, the 50-50 diblock shows the
transition from a phase diagram dominated by the
instability in the PS block (typical gas-liquid competi-
tion), to a phase diagram in which the dilute phase is sta-
bilized due to the attraction of the EO monomers to the
interface resulting in narrow phase diagrams that do not
change much with chain length (in the range n
PEO
100
150).
The two branches in the phase diagrams can be sum-
marized by looking at the critical temperature and critical
density as a function of chain length. This is shown in
Fig. 11. The critical surface coverage shows two distinct
branches. The low PEO molecular weight branch has low
critical surface coverage dominated by the PS instability.
The high surface coverage branch is dominated by the
behavior of the PEO block, i. e. the location of the kink in
the pressure with respect to the van der Waals loop. In
both branches the critical surface coverage decreases
with increasing PEO molecular weight. The critical tem-
perature shows a very strong decrease as the PEO mole-
cular weight increases in the PS dominated branch. How-
ever, it is not monotonic and varies only slightly in the
higher PEO molecular weight branch. We expect that as
the molecular weight of the PEO keeps increasing, at
fixed PS molecular weight, the diblock layer will be
stable at all surface coverages because the large PEO
pressure will be dominant at all densities.
It is interesting to look at the structure of the polymer
layer in the different phases at coexistence. To this end,
Fig. 12 shows the density profiles of the PEO and PS
blocks for two molecular weights of PEO but fixed PS
chain length. For both molecular weights the dilute phase
shows the PEO in a pancake configuration, i. e. almost all
the segments are adsorbed to the interface, while the
Fig. 10. Detailed pressure-area isotherms of PS-PEO (50-50)
diblock copolymers at the air-water interface. The upper solid
line corresponds to T=T
c;B
= 0.746, and shows a single mini-
mum. Decreasing the temperature, a double minimum is
observed at T=T
c;B
= 0.743 (dotted line); T=T
c;B
= 0.740 (dashed
line); T=T
c;B
= 0.738 (long dashed line); and T=T
c;B
= 0.735 (dot-
dashed line). The lowest temperature shown, T=T
c;B
= 0.733
(lower solid line), has again a single minimum
Fig. 11. Critical grafting density (upper figure) and critical
temperature (lower figure) of PS-PEO diblock copolymers at the
air-water interface as a function of the length of the PEO block
438 I. Szleifer, M. A. Carignano
more concentrated phase shows some segments adsorbed
followed by a brush like structure with an effective length
shorter than the total PEO block. Note the absolute value
of the volume fraction in the four graphs. The case corre-
sponding to the dilute regime of the shorter PEO is 10
times smaller than the other cases, reflecting the fact that
this dilute system is dominated by the PS block. For the
longer PEO block, the phase diagram has shifted (and
narrowed) to higher surface densities due to the more
dominant role of the PEO even at low surface coverage.
The PS shows the same structure as discussed above.
A question that arises is what type of configurations
are responsible for the brush portion of the structure in
the concentrated phase. Namely, do the segments on the
stretched portion of the density profiles belong to loop or
tail configurations? Fig. 13 shows the density profile of
the PEO block together with the calculated density pro-
files arising from tail and loop configurations. It is clear
that almost 100% of the brush-like structure arise from
tail configurations. The reason that loop configurations
contributing to the density profile far from the interface
have very low probability may be due to the chain lengths
that we are studying. Thus, even though the loop config-
urations may be favored from the entropic point of view,
one does not see the entropic contribution being the most
important one (as compared to tail configurations) until
the chain length of the block is very large. The figure
shows PEO with 100 segments and our calculations up to
n = 150 show the same effect. We cannot extend conclu-
sions from these results to very long chain lengths. How-
ever, it should be kept in mind that the molecular weights
of PEO that we are studying are those used experimen-
tally in most applications for biocompatible materials and
surface modified liposomes.
Fig. 12. Polymer density profile for the PS (solid line) and PEO (dotted line) blocks, at the surface
coverage corresponding to coexistence phases for T=T
c;B
= 0.83. The plots on the left correspond to the
dilute phase and those on the right are for the concentrated phase. The length of the PS is n
PS
= 30 for all
the cases. The top set is for n
PEO
= 50, and the bottom set corresponds to n
PEO
= 100. Note that the figures
on top correspond to a PS dominated system, thus, the dilute phase is very dilute. In contrast, PEO dom-
inates the behavior for the copolymer of length 30100 resulting in a dilute phase of much higher den-
sity (Note the different scales in the figure)
Tethered polymer layers: phase transitions and reduction of protein adsorption 439
The last type of system that we present in this section
corresponds to diblock copolymers grafted or tethered at
a solid surface. As described in the theory section, we
will only consider the case in which the role of the B
block (the tethering block) is to exert a repulsive interac-
tion on the segments of the A block when they are in con-
tact with the surface. Further, we will only show the case
in which the segments of the A block have an attractive
interaction with the bare surface. These systems were
recently described in detail in ref.
42)
and we review here
the main results for completeness.
Fig. 14 shows the pressure area isotherms for the
diblocks spread at the solid-fluid interface for a variety of
strengths for the A-B repulsions. As v
AB
increases there is
a van der Waals loop appearing. Thus, the repulsions
induce a first order phase transition between a pancake-
like configuration and a stretch (brush-like) configura-
tion.
This phase transition is very different from that of the
A-B diblock described above, in which the B block is in a
poor solvent environment and the A block is attracted to
the interface. First, in the case shown in Fig. 14 the driv-
ing force for the phase transition is the competition
between attractions to the surface of the A block and A-B
repulsions. The phase transition in the case shown in
Fig. 8 arises purely from the poor solvent environment of
the B block whereas the effect of A block is to suppress
the phase transition. Second, the structural changes on the
two sides of the coexistence are very different. Fig. 15
shows the density profiles of the A block at the two sides
of the coexistence curve for a given value of v
AB
. The
structures at coexistence show that there is a true pan-
cake to brush transition. In the pancake regime the A
block is completely adsorbed on the surface while the
brush phase shows a density profile with a depletion of
segments in the vicinity of the surface due to the A-B
repulsions.
The pancake to brush phase transition was first pre-
dicted by Alexander and later by Liguore. However, both
studies predicted that the only necessary conditions for
Fig. 13. The density profile (solid line) of a tethered PEO
block with 100 segments at a surface coverage r = 0.002 A
2
at
the water-air interface, i. e. v
AS
= 1. Also shown are the contri-
butions to the density profile from loop configurations (dotted
line) and from tail (dashed line) configurations (dashed line)
Fig. 14. Pressure area isotherms for diblock copolymers at a
solid-fluid interface. The copolymer consists of a tethered chain
with n
A
= 100 segments, and anchoring block completely grafted
on the surface. In the upper figure v
AS
= 1, while in the lower
v
AS
= 2. The different curves correspond to different AB repul-
sion. The solid line is for no repulsion, dotted line v
AB
= 16,
dashed line v
AB
= 48, long dashed line v
AB
= 80 and dot-dashed
line v
AB
= 112. Recall that v
AB
is multiplied by the total area of
the surface, thus resulting in very large absolute values. The
relevant variable is v
AB
rl
2
(see Eq. (4)) which in all cases is of
order unity or lower
440 I. Szleifer, M. A. Carignano
the presence of the phase transition were attractive inter-
actions between the tethering block and the surface. We
find that an additional repulsive interaction is necessary.
Actually, the case of PS-PEO studied experimentally (for
short PS block) did not show a first order phase transition
as would be expected from the predictions of Alexander
and of Liguore.
An experimental study with the same type of system as
that shown in Fig. 14 and 15 is that of Ou-Yang and
Gao
41)
in which they adsorb R-PEO-R, (where R can be
either hydrophobic hydrocarbon chains, or simply termi-
nating hydrogens) to large beads and measure the thick-
ness of the polymer layer as a function of the surface cov-
erage. The R block strongly adsorbs to the surface of the
beads while the PEO is claimed to have an attractive
interaction with the surface but much weaker than that of
R. They observe a sharp transition from a pancake regime
to a brush as the surface coverage increases in which the
thickness of the films is four to five times the bulk radius
of gyration of the PEO block. We calculated the height of
the brush as a function of the surface coverage for the
same cases shown in Fig. 14. There is very good agree-
ment between these predictions and the experimental
observations of Ou-Yang and Gao, further supporting the
validity of our theory.
A thorough study of the variation of critical surface
coverage as a function of chain length, strength of the
bare surface-A monomers attraction and strength of the
A-B repulsion can be found in reference
42)
.
In this section we presented a variety of possible sce-
narios of diblock copolymers at fluid-fluid and solid-fluid
interfaces. In many cases we found the possibility of
macrophase separation. For liquid-liquid interfaces we
find that if the B block is in a poor solvent environment
then this is the driving force for phase separation. The
phase diagram of the diblock depends upon the ratio of
length between A and B blocks and the interactions
between A blocks and the interface. Further, in the case of
solid surfaces the repulsions between the A and B mono-
mers are necessary in order to find a macroscopic phase
transition between a pancake and a brush.
It is important to emphasize that all of our studies have
considered only the possibility of macroscopic phase
separation. However, it is possible that the diblock copo-
lymers will form micellar aggregates on the surfaces or
interfaces, namely two dimensional micelles. This indeed
has been observed in a variety of experimental sys-
tems
37, 38, 56, 57)
. While our studies do not include this possi-
bility, we believe that the phase diagrams that we predict
should give proper guidelines for the regions of phase
space where microphase separation is possible. For exam-
ple, our studies predict no phase transition in (short-long)
PS-PEO in agreement with experimental observations.
However for larger B blocks, the theory predicts a first
order phase transition. Some related experimental sys-
tems
37, 38, 56, 57)
have shown micellar formation at the inter-
face. However, one of the blocks was a polyelectrolyte
and thus, long range interactions (not considered here)
may also be playing a role in determining the structure of
the system.
We believe that our studies can be used as general
guidelines on the type of diblocks and the regions of
phase space where homogeneous phases should form.
Clearly, a study of microphase separation will be highly
desirable so that one will be able to predict the type of
morphological and macroscopic phases that the system
may exhibit for a given diblock copolymer. For example,
microphase separation has been predicted in ref.
58, 60, 6265)
,
as well as the formation of surface micelles
66)
. A molecu-
lar description of surface micelles as the one used
throughout this paper requires extensive calculations, and
we are planning to pursue this possibility in the near
future.
4 Protein adsorption
As mentioned in the Introduction, tethered polymer layers
are being used in the design of biocompatible materi-
als
3, 7)
, including surface modified liposomes for drug
delivery
11, 12)
. The idea is to use the tethered polymer
layers as a steric barrier that will prevent the non-specific
adsorption of proteins. The basic idea is that one can
form a polymer brush of highly stretched chains that will
not allow any large molecule from the solution to reach
the surface
67)
. As has been discussed in recent years,
experimental systems in general do not form a highly
Fig. 15. Density profile of the tethered chains (n
A
= 100) at
both sides of the coexistence curve for v
AS
= 2 and v
AB
= 80.
The solid line corresponds to the dense (brush) phase, whereas
the dotted line is the profile on the dilute (pancake) phase
Tethered polymer layers: phase transitions and reduction of protein adsorption 441
stretched brush due to the difficulties associated with
forming a high surface coverage polymer layer. In reality,
the same steric barrier that will not allow proteins to
adsorb does not allow polymers to reach the surface and
thus, it is hard to form a high surface coverage brush
using solution grafting methods. In general, PEO with
relative low molecular weight is used for the synthesis of
biocompatible materials
3)
. There are several reasons for
the choice of this polymer including water solubility, high
flexibility and availability. It should be noted however,
that other polymers can also be used.
We have discussed in the previous section that PEO is
an amphiphilic polymer and therefore, it should be
attracted to hydrophobic surfaces. On the other hand, it
will be repelled from polar surfaces such as liposome sur-
faces. Thus, a complete molecular understanding of the
ability of polymers in general, and PEO in particular, to
reject proteins should include the study of protein adsorp-
tion on surfaces with grafted polymers as a function of:
(i) surface coverage of polymer, (ii) surface-PEO interac-
tion and (iii) phase transitions on the surface. Only after
the understanding of all these elements one should be
able to design the best polymer layer for preventing pro-
tein adsorption.
The first results that we show include the comparisons
between predictions of the theory and experimental
observations for the adsorption isotherms of lysozyme on
hydrophobic surfaces with grafted triblock copolymers
PEO-PPO-PEO. The isotherm represents the amount of
protein adsorbed as a function of the surface coverage of
polymer. The details of the model used in the calculations
for lysozyme can be found in ref.
39)
where the compari-
sons were shown for the first time. It is important to
emphasize that when we refer to protein adsorption iso-
therms we assume that the system has reached thermody-
namic equilibrium. The kinetic effects, as well as the
validity of the equilibrium assumption will be discussed
later.
Experiments were carried out in the following way: (1)
Glass surfaces were silanized to form a hydrophobic glass
surface. (2) The modified glass was put in contact with a
solution containing the triblock copolymer. The polymer
adsorbs to the surface due to the strong hydrophobic nat-
ure of the PPO block. (3) The PPO was chemically
grafted to the surface. (4) The surface coverage of poly-
mer was measured. (5) The surface with the polymer was
put in contact with a protein solution. (6) The amount of
protein on the surface was measured.
The surface coverage of polymer was varied by using
different concentration of the triblock in solution in step
(2). Note that the protein solution was kept at fixed con-
centration in all the experiments. Further experimental
details can be found in ref.
39)
Fig. 16 shows the isotherms for three different chain
lengths of the PEO blocks. The figure shows both experi-
mental observations and theoretical predictions. There
are several features to learn from this figure. First, there
seems to be no dependence of the amount of adsorbed
protein on the chain length of the PEO block. Second,
there are two very different regimes in terms of the ability
of the polymer layer to reduce the amount of protein
adsorbed. At very low surface coverage of PEO a slight
increase of surface coverage of polymer reduces the
amount of protein adsorbed by a large amount. After a
certain surface coverage, increasing the amount of poly-
mer does not seem to be very effective in further reducing
the amount of protein adsorbed. Third, there is excellent
agreement between the theoretical predictions and the
experimental observations for all the surface coverage of
polymer but the highest ones. For highest surface cover-
age, the theory predicts a complete protection of the sur-
face while the experimental observations still show some
protein adsorption.
The theory enables us to understand at the molecular
level what are the factors responsible for the behavior
revealed in Fig. 16. The agreement between theory and
experimental observations was obtained for the following
conditions. PEO segments have an attractive interaction
with the hydrophobic surface of v
AS
= 2. This is a rea-
sonable number since the attraction with the water-air
interface, which is much less hydrophobic than the sili-
nized glass, is half that amounts
31)
. There is a repulsion
between the PEO and PPO segments. Since we do not
Fig. 16. Adsorption isotherm for lysozyme on glass grafted
with triblock copolymers, PEO-PPO-PEO. Amount of lysozyme
on the surface as a function of grafted polymer surface coverage.
The symbols are experimental observations
39)
while the lines are
theoretical predictions. The circles (solid line) correspond to
(n
PEO
-n
PPO
-n
PEO
) 75-30-75, the triangles (dotted line) to 98-67-98,
and the squares (dashed line) to 128-54-128
442 I. Szleifer, M. A. Carignano
have any experimental information for the value of this
parameter, we have chosen it slightly lower than the criti-
cal value so that the predicted isotherms are in the homo-
geneous regime (see below). Furthermore, we have also
assumed that the presence of PPO on the surface results
in a surface dependent repulsive contribution to the pro-
tein. This repulsion does not have a strong effect on the
adsorption isotherm. The theoretical results presented in
ref.
39)
do not include this repulsion term, and they also
show very good agreement with the experimental obser-
vations.
Theoretical predictions explain the different regimes of
the adsorption isotherm shown in Fig. 16. At low surface
coverage of polymer, the PEO segments are in the pan-
cake regime. Namely, all the polymer segments are on
the surface and increasing the surface coverage increases
the area occupied by PEO by a large amount. This results
in a blockage of adsorption sites for the protein and the
decrease of protein adsorption with surface coverage is
very sharp.
The abrupt change in slope of the adsorption isotherms
(both experimental and theoretical) corresponds to the
surface coverage at which for the pure polymer surface,
i. e. that in the absence of the proteins, the PEO-PPO
repulsion and the steric PEO-PEO repulsion on the sur-
face are large enough to induce the desorption of some of
the PEO segments. A way to quantify the surface avail-
ability for protein adsorption is to determine the number
of adsorbed ethylene oxide segments as a function of the
polymer surface coverage in the absence of protein mole-
cules. This is shown in Fig. 17. The volume fraction of
adsorbed segments shows a maximum at the exact surface
coverage where the protein adsorption isotherm shows
the change in slope. This reaffirms that the mechanism
for the sharp reduction of protein adsorption in the low
surface coverage regime is based on blocking surface
adsorption sites.
The region of slow variation of protein adsorption with
surface coverage is characterized by a different mechan-
ism of the polymer layer to prevent protein adsorption.
As Fig. 17 shows, the volume fraction of adsorbed poly-
mer segments decreases, however there is also a brush
formed by the polymer segments that are not adsorbed to
the surface. In order to adsorb the protein it has to pull
some of the non adsorbed segments further from the sur-
face. This process is accompanied by a loss of conforma-
tional entropy of the polymer in the brush. However, the
proteins gain a large amount of attractive interaction by
being in contact with the surface. The result of that is that
as long as the distance between grafting points is large
enough to accommodate proteins on the surface, proteins
will adsorb by stretching the polymer segments out of the
surface. This mechanism to reduce protein adsorption is
much less effective than occupying adsorption sites and
therefore, the slope is smaller at high surface coverage
54)
.
A more clear explanation of this effect will be shown
below by treating the cases of attracting and non-attract-
ing surfaces (to the polymers) separately.
The understanding of the structure of the polymer layer
enables us to understand the mechanism of reduction of
protein adsorption by PEO-PPO-PEO grafted on a hydro-
phobic surface. There is one point however, that needs
further explanation. A careful look at the comparison
between the experimental observations and the theoretical
predictions shows that even though there is very good
agreement between the two, for relatively high surface
coverage the theory predicts zero protein adsorption
while the experimental observations show finite adsorp-
tion. We believe that the reason for this discrepancy is
that in the theoretical calculations, we have assumed that
the strength of the PEO-PPO repulsions is smaller than
that necessary for a phase transition. However, experi-
mental observations in the relatively high surface cover-
age regime are probably in the coexistence region
between pancake and the stretched brush. Preliminary
AFM observations of the structure of the polymer modi-
fied surface in the absence of proteins show the forma-
tions of domains of stretched brushes and domains of
pancake like structures
68)
.
Experimental observations are for a system in which
many different interactions play an important role in
determining the structure of the polymer layer and thus,
the resulting interactions with the protein molecules.
While the theory can predict this behavior and explain it
in great detail from the microscopic point of view, a bet-
Fig. 17. Amount of EO segments adsorbed on the surface as a
function of the area per molecule. The system corresponds to
n
PEO
-n
PPO
-n
PEO
= 75-30-75 in the absence of proteins. Note that
the surface coverage of maximum amount of adsorbed EO seg-
ments coincides with the change in slope of the adsorption iso-
therms shown in Fig. 16
Tethered polymer layers: phase transitions and reduction of protein adsorption 443
ter understanding of the generic features that determine
the ability of a polymer layer to prevent protein adsorp-
tion can be obtained by looking at the effect of the indivi-
dual interactions separately.
The results presented below are for a model system in
which the protein can exist in a single configuration in
bulk, but upon contact with the surface it can denature
into a different configuration. The conformation that can
exist both in bulk and on the surface will be called the
spherical configuration. This is modeled as a sphere with
dimensions similar to those of lysozyme and we consider
the surface-protein interactions to be those as calculated
from atomistic models of lysozyme with hydrophobic
surfaces
69)
. The interaction potential is shown in Fig. 18.
The denatured conformation is a disk-like configuration
whose volume is the same as the spherical configuration.
The height of the disk is 4/5 the radius of the spherical
configuration. The interaction of the disk with the surface
is twice that of the spherical configuration. Note that the
disk configuration can only exist in contact with the sur-
face and thus only the interaction at contact is needed.
This model for the protein is born of experimental obser-
vations on lysozyme suggesting that upon adsorption on
the surface it denatures into a structure resembling that
suggested here
70)
. It is important to emphasize that the
strength of the disk-surface interaction is chosen arbitra-
rily and this particular choice is such that in the absence
of grafted polymer, the disk configuration is preferred on
the surface over the sphere. Our main interest is to see the
interplay between the two possible adsorbed configura-
tions of the protein as a function of the surface coverage
of polymer and the interactions between the polymer and
the surface.
The first question that we address concerns the effect
of the polymer molecular weight. The comparison of the-
oretical predictions with experimental observations
demonstrates that in the range of chain lengths studied
there seems to be little effect. Actually, this independence
of the adsorption isotherm on chain length depends upon
specific surface-polymer interactions, the strength of the
protein-surface attraction and the size of the protein
molecule as compared to the polymer chain. In ref.
54)
it
has been shown that when the grafted polymers are not
attracted to the surface, there is a molecular weight
threshold above which the equilibrium adsorption iso-
therms are completely independent of the polymer mole-
cular weight. The chain length threshold depends upon
the size of the protein. Once the height of the polymer
layer is longer than the protein diameter the adsorption
isotherms seem to be independent of molecular weight.
Theoretical calculations suggest that what determines
the equilibrium amount of protein adsorbed is not the
polymer chain length but the number of polymer seg-
ments that need to be stretched out of the surface in order
to accommodate the adsorbing proteins
54)
. This points out
to another interesting finding which shows that in order
to determine the amount of protein adsorption on a given
grafted polymer layer, the structure of the layer, while
providing information on the mechanism of protein
adsorption, cannot be used to determine the amount of
protein that will adsorb. Namely, the amount of protein
adsorption is determined by the interplay between the
polymer, the proteins and their interactions. Moreover,
the resulting structure of the polymer with the adsorbed
proteins is very different than the polymer layer in the
absence of protein. This is an important consideration for
proteins that have strong attractive interactions with the
surfaces. In those cases, the protein will have no problem
in deforming the grafted polymer layer at an entropic cost
that turns out to be small compared to the gain of surface-
protein contact
54)
. On the other hand, the structure of the
polymer layer in the absence of the protein contains
important information to determine the kinetic process of
adsorption, including quantitative information as will be
discussed below.
In case the grafted polymers have attractive interac-
tions with the surface, the molecular weight dependence
is different than for surfaces that do not attract the poly-
mer segments. The reason is that the mechanism of pro-
tein adsorption is different. If the protein needs to remove
some of the adsorbed polymer from the surface there is
an additional penalty associated with the loss of contact
energy between the polymer and the surface. This is in
addition to the deformation of the polymer layer. These
two effects combined make the problem more difficult to
predict in general terms. For example, in comparisons
with experimental observations shown in Fig. 16 at small
surface coverage, the behavior is dominated by attractive
interactions between PEO and the surface, and there is no
molecular weight dependence for the chain lengths stu-
died. However, model theoretical predictions have shown
strong dependence on molecular weight for a similar
Fig. 18. Interaction potential between a lysozyme and a model
hydrophobic (bare) surface
69)
444 I. Szleifer, M. A. Carignano
model system but with weaker attractive interactions with
the surface. Again for attractive surfaces, each case and
range of parameters has to be considered explicitly to
draw conclusions on molecular weight dependence.
To understand the very dramatic effect that the poly-
mer-surface attractive interactions has on the adsorption
isotherms in more detail, Fig. 19 shows the adsorption
isotherms for a variety of strengths of the surface-poly-
mer attraction, v
AS
. The isotherms are shown for two dif-
ferent molecular weights. Thus, we will discuss the effect
of surface-polymer interactions and that of molecular
weight. Note, that in order to isolate the effect of the
polymer segment-surface attractions in all cases the sur-
face-protein interactions are the same. It is also important
to emphasize that while the hydrophobic surfaces used in
the experiments presented in Fig. 16 strongly attract the
ethylene oxide segments of the PEO chains, there is a
very large class of materials in which the PEO is not
attracted to the surface, such as lipid surfaces
33, 34)
.
There are two pronounced features that can be seen in
Fig. 19 for each molecular weight. First, the stronger the
attraction of the polymer segments to the surface the
lower the amount of protein that can adsorb (at fixed
polymer surface coverage). The effect is different for dif-
ferent regimes of surface coverage. For low surface cov-
erage, the surface-polymer attractions have a relatively
smaller effect than at intermediate surface coverage. In
particular, the surface coverage above which no protein
adsorption takes place depends strongly on the strength
of the polymer-surface attraction.
The best protective grafted polymer layers are those in
which the segments of the chain molecules are attracted
to the surface. The ability of the polymers attracted to the
surface to better prevent protein adsorption arises from
the thermodynamic cost associated with desorbing seg-
ments from the surface to find adsorption area for the pro-
tein. This has to be compared to the entropic cost of poly-
mer deformation that the protein induces in case of
adsorption on surfaces with grafted polymers not attract-
ed to the surface.
Second, the shape of the adsorption isotherms is differ-
ent for the weakly polymer-attractive surfaces as com-
pared to the strongly attracting surfaces. The shape of the
isotherms reflects the interplay between spherical and
disk configuration upon adsorption onto surfaces with
different grafted polymer layers.
An interesting result shown in Fig. 19 is the depen-
dence of the protein adsorption isotherm on molecular
weight. It is clear that the molecular weight dependence
is a function of the polymer segment-surface attraction
and the surface coverage regime. However, in most cases
there is no dramatic dependence on the molecular weight.
The competition between the two adsorbing configura-
tions of the protein is shown in Fig. 20 for surfaces that
do not attract the polymer (upper graph) and for surfaces
that do (lower graph). For surfaces that do not attract the
polymer segments the behavior is as follows. When there
is no polymer on the surface the disk configuration has
higher population. Recall that the bare protein-surface
interactions were chosen so that this will be the case. The
total equilibrium density of proteins on the surface is
quite smaller than close packing due to the finite surface-
protein attraction. As the surface coverage of polymer
increases the amount of spherical configuration on the
surface decreases while the disk remains more or less
constant. The surface density of disk configurations starts
to decrease only for surface coverages above which there
is essentially no more spherical configurations adsorbed.
The interplay in case of surfaces not attractive for the
polymer can be understood from the cartoon of Fig. 21,
top. The main effect of adsorbing proteins on the polymer
layer is to stretch some of the polymer segments that are in
the vicinity of the surface towards the solvent. The seg-
ments that are stretched are those that are found in the
region of maximal repulsion with the proteins. The spheri-
cal configuration exerts maximal repulsions very close to
the region of maximal density of the polymer layer. There-
fore, the spherical configuration is the first one to be
excluded from the surface since it feels the maximal repul-
sions from the polymer layer and it has less attractive inter-
actions with the surface than the disk configuration.
The case of surfaces that attract the polymer segments
is exactly the opposite one. Namely, first the disk config-
Fig. 19. Model lysozyme adsorption isotherms on a surface
with grafted polymers. The amount of adsorbed protein as a
function of the surface coverage of the tethered polymers. The
polymer (PEO) chain lengths are n
A
= 50 (solid lines, open sym-
bols) and n
A
= 100 (dotted lines, filled symbols). The different
symbols correspond to different v
AS
, i. e. different strengths of
surface-monomer attraction. v
AS
= 0 (circles), v
AS
= 0.5
(squares), v
AS
= 1.0 (diamonds), v
AS
= 1.5 (triangle up),
v
AS
= 2.0 (triangle down)
Tethered polymer layers: phase transitions and reduction of protein adsorption 445
uration population decreases as the surface coverage of
polymer increases (see Fig. 20, bottom). Only after there
are no more disks adsorbed, the surface density of the
spherical configuration starts to decrease. The reason for
this behavior is again related to the location of the maxi-
mal pressures exerted by the polymer layer (see cartoon
in Fig. 21, bottom). For surfaces that attract the polymer
segments, the structure of the polymer layer at low sur-
face coverage is that of adsorbed pancakes. These struc-
tures exert maximal repulsions close to the surface. This
is the region where the disk configuration of the protein
has all of its volume resulting in very large repulsions as
compared to the spherical configuration. For the latter,
the maximal volume is at a distance from the surface that
there are almost no polymer segments at low surface cov-
erage. The repulsions between polymers and the disk con-
figuration are strong enough to overcome the very large
difference in attractive interactions between disk and
spherical configurations.
The interplay between different configurations as a
function of the interactions between the polymer seg-
ments and the surface can be used to prevent or accelerate
surface induced configurational changes on proteins.
Furthermore, a proper design of the polymer layer may
lead to selective adsorption of given protein conforma-
tions. Clearly, the theoretical results also show that one
can use polymer layers of different kinds for selective
adsorption from mixtures of proteins. However, that is
beyond the scope of the discussion here. It will be inter-
esting to check the predictions of the theory against
experimental observations, however we are not aware of
experimental studies of this kind.
The discussion up to this point concentrated on equili-
brium adsorption. Namely, all the results that have been
shown assumed that the system has reached thermody-
namic equilibrium. This is an approximation that may be
questionable due to the very large energy differences
associated with protein adsorption. Comparisons with
experimental results suggest that the systems have
reached equilibrium or that they are not very far from it.
Actually, kinetic studies have shown that the measured
adsorption isotherms shown in Fig. 16 do not change
even after very long periods of time
68)
. However, in many
cases the process is kinetically controlled and one would
expect that this effect will be even more pronounced in
the presence of a grafted polymer layer.
We consider now the potential of mean-force that a pro-
tein feels as it approaches the surface in the presence of
grafted polymers. The potential of mean force includes
two contributions, the attractive interactions of the bare
surface with the protein and the repulsive contribution that
arises from the interactions of the protein approaching the
surface and the grafted polymers. In case one wants to cal-
Fig. 20. The total adsorption isotherm and the isotherms for
the sphere and disk configurations. The chain length of the
grafted polymers is n
A
= 100, the upper graph corresponds to no
attraction between polymer and the surface (v
AS
= 0), and the
lower figure corresponds to an attractive surface, v
AS
= 2. The
solid line is the total adsorption, the dashed line corresponds to
the disk configuration, and the dotted line to the spherical con-
figuration
Fig. 21. Disk vs spherical configuration of adsorbed proteins.
For the case of a non-attractive surface (a), strongest repulsions
are at a distance (arrows) from the surface that approximately
coincides with the maximum cross-sectional area of the spheres.
For the attractive surface case (b), strongest repulsion occurs
next to the surface, where the disk configuration has a much lar-
ger area than the spheres
446 I. Szleifer, M. A. Carignano
culate the potential of mean-force in the presence of
already adsorbed proteins, interactions must also include
the approaching protein-adsorbed proteins contribution.
We consider the potential of mean-force of the proteins
with the surface with grafted polymers in the absence of
any adsorbed protein. These interactions should deter-
mine the time scale for the beginning of the adsorption
process. Further, they provide an excellent measure for
the ability of the polymer layer to kinetically control pro-
tein adsorption.
Fig. 22 shows the potentials of mean-force for the same
systems shown in Fig. 19 at a surface coverage rl
2
= 0.01.
Each graph represents a molecular weight. For this surface
coverage the ability of the grafted polymer layer to reduce
the equilibrium amount of adsorbed proteins is the same
for v
AS
A kT. The potential of mean force for the short
chain length (n = 50) shows exactly the opposite behavior.
Namely, the potentials of mean-force are the same for
v
AS
a kT. The reason that the potentials of mean-force
are the same is that the structure of the polymer layer is the
same for all the segments adsorbed onto the surface. Thus,
the proteins (for the larger attractive interactions between
the polymer and the surface) does not feel any repulsive
interaction until it is in contact with the surface. However,
at such reduced distance from the surface, the bare sur-
face-protein attraction is strong enough that the overall
potential is attractive for all distances (for this polymer
surface coverage). This will imply very fast dynamics (at
least at early stages) that will be dominated by the diffu-
sion of the proteins towards the surface.
For weakly attractive and non-attractive surfaces, the
picture is rather different. There is a maximum in the
potential that arises from the polymer segments stretched
out of the surface. This is the steric barrier that the poly-
mers form and it determines the kinetic behavior. Note
that the larger kinetic barrier, and thus the slower kinetics
of adsorption, is predicted in the case of non-attracting
surfaces. This is the case predicted to have the maximal
amount of proteins adsorbed at equilibrium.
The longer chain length shows a similar behavior, how-
ever, the potentials are different for all v
AS
, and the repul-
sions are stronger and of a longer range. This reflects the
different structures of the polymer chains for the different
molecular weights and attractive interactions with the sur-
face. It is interesting to note that the equilibrium amount
of protein adsorbed for the two chain lengths with
v
AS
= 0, and the surface coverage used in Fig. 21 are
identical. However, the potentials of mean-force are com-
pletely different in strength and range. The time scale for
adsorption of the proteins to the surface with longer
grafted chains is going to be orders of magnitude larger
than for the shorter chains
54)
.
Fig. 23 shows the potentials of mean-force but now for
rl
2
= 0.02. In this case, all the polymer layers show a
repulsive barrier. However, the magnitude of the barrier
(and the range of the repulsion) increases as the attraction
between the surface and the polymer segments weakens.
Note that while the barrier is lower for the strongly
attracting surfaces, the potential at contact is much
weaker. This is an early manifestation of the smaller
amount of protein that will adsorb at equilibrium. Again,
we see the same molecular weight effect by comparing
figures A and B. Namely, the longer the molecular weight
the longer range and stronger the repulsive barrier for the
approaching proteins.
5 Concluding remarks
The properties of block copolymers spread at fluid-fluid
and solid-fluid interfaces were studied with a molecular
Fig. 22. Potential of mean force between model protein and
surface with grafted polymers as a function of the distance of
the protein from the surface; n
A
= 50 (upper figure) and n
A
= 100
(lower figure) at rl
2
= 0.01. The different lines correspond to
different v
AS
: no attraction (solid line), v
AS
= 0.5 (dotted line),
v
AS
= 1.0 (dashed line), v
AS
= 1.5 (long dashed line),
v
AS
= 2.0 (dot-dashed line). Note that all the potentials corre-
spond to surfaces with grafted polymers but no proteins
adsorbed
Tethered polymer layers: phase transitions and reduction of protein adsorption 447
approach. The theory enables the calculation of detailed
conformational and thermodynamic properties and has
been shown to provide accurate information as compared
to experimental observations for both types of properties.
In this work we studied the effect of the anchoring
block on the phase behavior of the polymer layers. We
have found a variety of different phase transitions
depending upon the type of interactions between the
polymer segments and the polymer-interface interactions.
We find that the formation of the different phases depends
upon the type of polymer-polymer and polymer-interface
interactions, as well as in the ratio of molecular weight
between the blocks. The main conclusion is that we can-
not in general assume that the sole effect of the anchoring
block is to have the tethered block attached to the surface.
The interactions between tethered and tethering block
may induce phase transitions among phases of very dif-
ferent morphologies.
It is important to emphasize that in this work we have
only considered the possibility of macrophase separation.
In many cases one would expect the formations of micro-
domains, as has been observed experimentally
37, 38, 56, 57)
and predicted theoretically
58, 60, 6265)
. These domains may
be the result of kinetically trapped phase separating sys-
tems or true morphological changes induced by aggregate
formation that represent the two dimensional counterpart
of three dimensional micellization. The formation of
aggregates may preempt the macroscopic phase separa-
tion predicted here and thus, a complete study of all the
possibilities is necessary. However, that is a rather com-
plex undertaking due to the large number of variables,
and the many possible morphologies. We believe, how-
ever, that our predictions can be used to find the regime
of interactions and molecular weights of the blocks form-
ing the copolymer in which the layer will be homoge-
neous.
The structural and phase behavior of the polymer layer
is a determining factor in the ability of the polymer mole-
cules to prevent protein adsorption. We have shown a
variety of possible scenarios including direct comparison
between theoretical predictions and experimental obser-
vations. The ability of the theory to quantitatively predict
the protein adsorption isotherms, including the possibility
of a phase separation in the polymer layer confirmed by
experimental observations, is a further evidence that the
theory is reliable in predicting the interactions between
tethered polymers and proteins.
The main conclusion from the work on protein adsorp-
tion is that in order to estimate the ability of a polymer
layer to prevent protein adsorption, the interactions
between the polymer and the surface play a key role.
Further, the possibility of conformational changes (or
denaturation) of the protein on the surface depends upon
the type of polymer layer with which the protein is inter-
acting. The thermodynamic control of protein adsorption
seems to be determined mostly by the structure of the
polymer layer in the very close vicinity of the surface
(within a few angstroms). Actually, the most important
variable determining the amount of protein that can
adsorb on the modified surfaces is the polymer surface
coverage. On the other hand, kinetic control is a function
of the distribution of polymer segments in the whole
polymer layer. Therefore, polymer layers that may be
very good for the kinetic control of protein adsorption
may show large equilibrium adsorption. This implies that
in order to design a grafted polymer layer for prevention
of protein adsorption both kinetic and thermodynamic
considerations must be taken into account depending
upon the desired application. The next natural step is to
study in detail the kinetic process of the adsorption.
Acknowledgement: This work is supported by NSF grant
CTS-9624268. I. S. is a Camille Dreyfus Teacher-Scholar. We
also acknowledge partial support from the Petroleum Research
Fund administered by the American Chemical Society.
Fig. 23. Same as Fig. 22 but at rl
2
= 0:02
448 I. Szleifer, M. A. Carignano
1)
D. H. Napper, Polymeric Stabilization of Colloidal Disper-
sions, Academic Press, New York 1983
2)
D. F. Evans, H. Wennerstrom, The Colloidal Domain:
Where Physics, Chemistry, Biology and Technology Meet,
VCH Publisher, New York 1994
3)
Poly(ethylene glycol): Chemistry and Biological Applica-
tions, J. M. Harris, S. Zalipsky, Eds., American Chemical
Society, Washington 1997
4)
K. D. Park, K. Suzuki, W. K. Lee, Y. H. Kim, Y. Sakurai, T.
Okano, ASAIO J. 42, M876 (1996)
5)
K. D. Nelson, R. Eisenbaumer, M. Pomerantz, R. C. Eber-
hart, ASAIO J. 42, M884 (1996)
6)
C. R. Jenney, J. M. Anderson, J. Biomed. Mater. Res. 44, 206
(1999)
7)
Proteins at Interfaces II: Fundamentals and Applications,
T. A. Horbett, J. L. Brash, Eds., American Chemical Society,
Washington 1995
8)
T. M. Allen, C. Hansen, F. Martin, C. Redemann, A.
Yauyoung, Biochim. Biophys. Acta 1066, 29 (1991)
9)
V. P. Torchilin, V. G. Omelyanenko, M. I. Papisov, A. A.
Bogdanov, V. S. Trubetskoy, J. N. Herron, C. A. Gentry, Bio-
chim. Biophys. Acta 1195, 11 (1991)
10)
G. S. Kwon, Crit. Rev. Ther. Drug Carrier Syst. 15, 481
(1998)
11)
Stealth liposomes, D. Lasic, F. Martin, Eds., CRC Press,
Boca Raton 1995
12)
L. Fisher, D. Lasic, Curr. Opin. Colloid Interface Sci. 3, 509
(1998)
13)
A. Halperin, M. Tirrell, T. P. Lodge, Adv. Polym. Sci. 100, 31
(1992)
14)
S. T. Milner, Science 251, 905 (1991)
15)
G. S. Grest, M. Murat, Macromolecules 26, 3108 (1993)
16)
P.-Y. Lai, K. Binder, J. Chem. Phys. 95, 9288 (1991)
17)
A. Chakrabarti, R. Toral, Macromolecules 23, 2016 (1990)
18)
G. S. Grest, M. Murat, in: Monte Carlo and Molecular
Dynamics Simulations in Polymer Science, K. Binder, Ed.,
Clarendon Press, Oxford 1994
19)
I. Szleifer, M. A. Carignano, Adv. Chem. Phys. XCIV, 165
(1996)
20)
S. Alexander, J. Physique 38, 983 (1977)
21)
S. T. Milner, T. A. Witten, M. E. Cates, Macromolecules 22,
2610 (1988)
22)
A. Halperin, in: Soft Order in Physical Systems, Y. Rabin,
R. Bruinsma, Eds., Plenum Press, New York 1994
23)
H. J. Taunton, C. Toprakcioglu, L. J. Fetters, J. Klein, Nature
332, 712 (1988)
24)
H. J. Taunton, C. Toprakcioglu, L. J. Fetters, J. Klein, Macro-
molecules 23, 571 (1990)
25)
M. Tirrell, S. Patel, G. Hadziioannou, P. Natl. Acad. Sci. 84,
4725 (1987)
26)
P. Auroy, Y. Mir, L. Auvray, Phys. Rev. Lett. 69, 93 (1992)
27)
B. J. Factor, L.-T. Lee, M. S. Kent, F. Rondelez, Phys. Rev. E
48, 2354 (1993)
28)
A. Karim, S.K. Satija, J. F. Douglas, J. F. Ankner, L. J. Fet-
ters, Phys. Rev. Lett. 73, 3407 (1994)
29)
M. S. Kent, L.-T. Lee, B. Farnoux, F. Rondelez, Macromole-
cules 25, 6240 (1992)
30)
H. D. Bijsterbosch, V. O. Dehaan, A. W. Degraaf, M. Mel-
lema, F. A. M. Leermakers, M. A. C. Stuart, A. A. Vanwell,
Langmuir 11, 4467 (1995)
31)
M. C. Faure, P. Bassereau, M. A. Carignano, I. Szleifer, Y.
Gallot, D. Andelman, Eur. Phys. J. B 3, 365 (1998)
32)
I. Szleifer, Curr. Opin. Colloid Interface Sci. 1, 416 (1996)
33)
J. Majewski, T. L. Kuhl, M. C. Gerstenberg, J. N. Israelach-
vili, G. S. Smith, J. Phys. Chem. B 101, 3122 (1997)
34)
T. L. Kuhl, J. Majewski, J. W. Wong, S. Steinberg, D. E.
Leckband, J. N. Israelachvili, G. S. Smith, Biophys. J. 75,
2352 (1988)
35)
P. Auroy, L. Auvray, L. Leger, Macromolecules 24, 5158
(1991)
36)
M. S. Kent, L. T. Lee, B. J. Factor, F. Rondelez, G. Smith, J.
Phys. IV 3, 49 (1993)
37)
J. Zhu, A. Eisenberg, B. Lennox, J. Amer. Chem. Soc. 113,
5583 (1991)
38)
J. Zhu, R. B. Lennox, A. Eisenberg, Langmuir 7, 1579 (1991)
39)
T. McPherson, A. Kidane, I. Szleifer, K. Park, Langmuir 14,
176 (1998)
40)
C. Ligoure, J. Phys. II 3, 1607 (1993)
41)
H. D. Ou-yang, Z. H. Gao, J. Phys. II 1, 1375 (1991)
42)
I. Szleifer, Europhys. Lett. 44, 721 (1998)
43)
E. F. Luscher, S. Weber, Thromb. Haemostasis 70, 234
(1993)
44)
A. Ben-Shaul, I. Szleifer, W. M. Gelbart, J. Chem. Phys. 83,
3597 (1985)
45)
I. Szleifer, A. Ben-Shaul, W. M. Gelbart, J. Chem. Phys. 83,
612 (1985)
46)
M. A. Carignano, I. Szleifer, J. Chem. Phys. 98, 5006 (1993)
47)
M. A. Carignano, I. Szleifer, J. Chem. Phys. 100, 3210
(1994)
48)
M. A. Carignano, I. Szleifer, J. Chem. Phys. 102 ,8662
(1995)
49)
M. A. Carignano, I. Szleifer, Macromolecules 28, 3197
(1995)
50)
I. Szleifer, Curr. Opin. Solid State Mater. Sci. 2, 337 (1997)
51)
J. S. Rowlinson, B. Widom, Molecular Theory of Capillar-
ity Clarendon Press, Oxford 1982
52)
M. A. Carignano, I. Szleifer, Europhys. Lett. 30, 525 (1995)
53)
M. A. Carignano, I. Szleifer, Macromolecules 27, 702 (1994)
54)
I. Szleifer, Biophys. J. 72, 595 (1997)
55)
I. Szleifer, Physica A 244, 370 (1997)
56)
S. Li, S Hanley, S. K. Varshney, A. Eisenberg, R. B. Lennox,
Langmuir 9, 2243 (1993)
57)
S. Li, C. J. Clarke, R. B. Lennox, A. Eisenberg, Colloids and
Surfaces A 133, 191 (1998)
58)
C. Yeung, A. C. Balazs, D. Jasnow, Macromolecules 26,
1914 (1993)
59)
D. R. M. Williams, J. Phys. II 3, 1313 (1993)
60)
H. Tang, I. Szleifer, Europhys. Lett. 28, 19 (1994)
61)
H. Tan, M. A. Carignano, I. Szleifer, J. Chem. Phys. 102,
3404 (1995)
62)
R. S. Ross, P. Pincus, Europhys. Lett. 19, 79 (1992)
63)
Pik-Yin Lai, Kurt Binder, J. Chem. Phys. 97, 586 (1992)
64)
Weinhold, S. Kumar, J. Chem. Phys. 101, 4312 (1994)
65)
G. S. Grest, Macromolecules 27, 418 (1994)
66)
E. M. Sevick, D. R. M. Williams, Phys. Rev. Lett. 82, 2701
(1999)
67)
S. I. Jeon, J. H. Lee, J. D. Andrade, P. G. De Gennes, J. Col-
loid Interface Sci. 142, 149 (1991)
68)
A. Kidane, K. Park, private communication
69)
S. J. Lee, K. Park, J. Vac. Sci. Technol. 13, 1 (1994)
70)
P. Billstein, M. Wahlgren, M. T. Arnebrant, J. McGuire, H.
Elwing, J. Colloid Interface Sci. 175, 77 (1995)
S-ar putea să vă placă și
- GOOD-10 1021@jp047462+Document10 paginiGOOD-10 1021@jp047462+MahdiÎncă nu există evaluări
- Mcquade2018 cracksACSOmega PDFDocument6 paginiMcquade2018 cracksACSOmega PDFTapati DuttaÎncă nu există evaluări
- 9037 PDFDocument6 pagini9037 PDFpdfÎncă nu există evaluări
- Dickinson1991 2Document29 paginiDickinson1991 2MiguelAngelDelgadoD'AppollonioÎncă nu există evaluări
- Recovery of Biosynthetic Products Using Membrane ContactorsDocument26 paginiRecovery of Biosynthetic Products Using Membrane ContactorsCarlo GostoliÎncă nu există evaluări
- Theory of Transport in MembranesDocument17 paginiTheory of Transport in MembranesMuhammad Fattah Romdhoni100% (1)
- Lec 9-Compatibility of Polymer BlendsDocument7 paginiLec 9-Compatibility of Polymer BlendsMua ban linh tinh100% (1)
- 1 s2.0 S1002007122000478 MainDocument14 pagini1 s2.0 S1002007122000478 MainMak ALÎncă nu există evaluări
- Anti-Biofouling Coating by Wrinkled, Dual-Roughness Structures of Diamond-Like Carbon (DLC)Document8 paginiAnti-Biofouling Coating by Wrinkled, Dual-Roughness Structures of Diamond-Like Carbon (DLC)sithvincentÎncă nu există evaluări
- Supercritical Impregnation for Drug Delivery and Polymer BlendingDocument7 paginiSupercritical Impregnation for Drug Delivery and Polymer BlendingAde AnjaniÎncă nu există evaluări
- Zhang 2007Document8 paginiZhang 2007Nayim SepayÎncă nu există evaluări
- MembranesDocument30 paginiMembranesmiraziey100% (1)
- JMaterChem2010 20 7788 PDFDocument12 paginiJMaterChem2010 20 7788 PDFecully03Încă nu există evaluări
- Impact of PAM on Al2O3 stabilityDocument7 paginiImpact of PAM on Al2O3 stabilityyudi permanaÎncă nu există evaluări
- MembranesDocument30 paginiMembranesInamullah MaitloÎncă nu există evaluări
- Journal of Colloid and Interface ScienceDocument13 paginiJournal of Colloid and Interface ScienceBouzid MohamedÎncă nu există evaluări
- 2015 Morphology Control of Polysulfone Membranes in FiltrationDocument22 pagini2015 Morphology Control of Polysulfone Membranes in FiltrationHarum Azizah DarojatiÎncă nu există evaluări
- Porous Drug-Eluting Structures for Wound Healing and Tissue RegenerationDocument32 paginiPorous Drug-Eluting Structures for Wound Healing and Tissue Regenerationa_minisoft2005Încă nu există evaluări
- Hill2004Document16 paginiHill2004brouuorbÎncă nu există evaluări
- 1ee6308b-21ba-4652-a976-e3f41dbd5fa9Document20 pagini1ee6308b-21ba-4652-a976-e3f41dbd5fa9BanÎncă nu există evaluări
- Flow Micro-Calorimetry (FMC) Applied To The Study of Polymer Adsorption On Divided MattersDocument24 paginiFlow Micro-Calorimetry (FMC) Applied To The Study of Polymer Adsorption On Divided MattersFerhat AkliÎncă nu există evaluări
- Single-Molecule Tracking of Polymer Surface Di Ffusion: Michael J. Skaug, Joshua N. Mabry, and Daniel K. SchwartzDocument6 paginiSingle-Molecule Tracking of Polymer Surface Di Ffusion: Michael J. Skaug, Joshua N. Mabry, and Daniel K. Schwartzprakush01975225403Încă nu există evaluări
- Journal of Membrane Science: SciencedirectDocument23 paginiJournal of Membrane Science: SciencedirectKunal SharmaÎncă nu există evaluări
- Effect of in-plane order and activity on vesicular morphologyDocument17 paginiEffect of in-plane order and activity on vesicular morphologyntsdharmaÎncă nu există evaluări
- Preparation and Analysis of Asymmetric MembranesDocument5 paginiPreparation and Analysis of Asymmetric MembranesOscar A. LuévanoÎncă nu există evaluări
- Phase Transitions and Phase Equilibria in Spherical ConfinementDocument13 paginiPhase Transitions and Phase Equilibria in Spherical ConfinementJonathan RoÎncă nu există evaluări
- Colloid 2 PDFDocument12 paginiColloid 2 PDFTamiÎncă nu există evaluări
- Probing The Degree of Crosslinking of A Cellulose Based Superabsorbing Hydrogel Through Traditional and NMR TechniquesDocument12 paginiProbing The Degree of Crosslinking of A Cellulose Based Superabsorbing Hydrogel Through Traditional and NMR Techniquesdeni.sttnÎncă nu există evaluări
- Moisture - Diffusion - in - Epoxy - SystemsDocument13 paginiMoisture - Diffusion - in - Epoxy - SystemsVansala GanesanÎncă nu există evaluări
- 1 s2.0 S0376738821003318 MainDocument11 pagini1 s2.0 S0376738821003318 MainPamela AlvarezÎncă nu există evaluări
- Yamada RITE Capture 05Document2 paginiYamada RITE Capture 05Pendi Adi MertaÎncă nu există evaluări
- Chapter 4 - Membrane CharacterizationDocument17 paginiChapter 4 - Membrane CharacterizationNurfarahain ZolkeflyÎncă nu există evaluări
- Reverse OsmosisDocument53 paginiReverse Osmosisanabloom100% (2)
- 2404.00120Document23 pagini2404.0012055ze46mhiÎncă nu există evaluări
- Types of Monolayer at Liquid Surfaces: Soluble Monolayers and The Gibbs Adsorption EquationDocument3 paginiTypes of Monolayer at Liquid Surfaces: Soluble Monolayers and The Gibbs Adsorption EquationMukesh TiwariÎncă nu există evaluări
- A Theoretical Study of Membrane Constraint in Polymer-Electrolyte Fuel CellsDocument12 paginiA Theoretical Study of Membrane Constraint in Polymer-Electrolyte Fuel CellsUw SdÎncă nu există evaluări
- Wear of Polymers: An Essay On Fundamental Aspects: Load Rigid Asperity / T - "Document13 paginiWear of Polymers: An Essay On Fundamental Aspects: Load Rigid Asperity / T - "Tamara Maria Ortiz MendezÎncă nu există evaluări
- PDF - PlasmaDocument5 paginiPDF - PlasmaRavi Kumar PanthangiÎncă nu există evaluări
- International Journal of Pharma and Bio Sciences: ReviewDocument10 paginiInternational Journal of Pharma and Bio Sciences: ReviewRajesh KumarÎncă nu există evaluări
- Dispersion of Modified Silica Nanoparticles for Superhydrophobic CoatingsDocument11 paginiDispersion of Modified Silica Nanoparticles for Superhydrophobic CoatingsAnujÎncă nu există evaluări
- Advanced Sepa.Document16 paginiAdvanced Sepa.mikialeÎncă nu există evaluări
- CP Modulus ReviewDocument21 paginiCP Modulus ReviewTheoÎncă nu există evaluări
- Polymer Rheology. Theory and Practice - Yuri G. YanovskyDocument308 paginiPolymer Rheology. Theory and Practice - Yuri G. YanovskyJose RdzÎncă nu există evaluări
- Besancon, Green - 2007 - Dewetting Dynamics in Miscible Polymer-Polymer Thin Film Mixtures-AnnotatedDocument9 paginiBesancon, Green - 2007 - Dewetting Dynamics in Miscible Polymer-Polymer Thin Film Mixtures-AnnotatedMarwa AliÎncă nu există evaluări
- Melburne C. LeMieux Et Al - Microtribological and Nanomechanical Properties of Switchable Y-Shaped Amphiphilic Polymer BrushesDocument12 paginiMelburne C. LeMieux Et Al - Microtribological and Nanomechanical Properties of Switchable Y-Shaped Amphiphilic Polymer BrushesHumdsÎncă nu există evaluări
- 1 s2.0 S0376738804000523 MainDocument9 pagini1 s2.0 S0376738804000523 MainchetanÎncă nu există evaluări
- Structure and Flow Properties of Polymeric Dendrimers: The ProblemDocument3 paginiStructure and Flow Properties of Polymeric Dendrimers: The ProblemMalik MalikÎncă nu există evaluări
- MacromolecularRapidCommunications2023 Vagias Et Al PUBLISHEDDocument7 paginiMacromolecularRapidCommunications2023 Vagias Et Al PUBLISHEDApostolos VagiasÎncă nu există evaluări
- Polymers: Polymer Conformation Under ConfinementDocument14 paginiPolymers: Polymer Conformation Under ConfinementVarnath ReddyÎncă nu există evaluări
- 20231121SF01 - PUMC Surface Modification and CapsuleDocument10 pagini20231121SF01 - PUMC Surface Modification and CapsuleMlx HoÎncă nu există evaluări
- 1.0 Introdcution Chi 2308 Surface and Colloid ChemistryDocument18 pagini1.0 Introdcution Chi 2308 Surface and Colloid Chemistryowegibrian479Încă nu există evaluări
- Technical Articles: Film andDocument9 paginiTechnical Articles: Film andLong HoàngÎncă nu există evaluări
- Transport Through Polymer Membranes: G The Polymer Is in Its GlassyDocument8 paginiTransport Through Polymer Membranes: G The Polymer Is in Its Glassyeni_cristianÎncă nu există evaluări
- Selective Adsorption of L1210....Document9 paginiSelective Adsorption of L1210....johnliu901029Încă nu există evaluări
- Gas Diffusion in Polymer Nanocomposites Role of Defects and Caves in FillersDocument13 paginiGas Diffusion in Polymer Nanocomposites Role of Defects and Caves in Fillerswan jianfengÎncă nu există evaluări
- Proceedings of The 5th Canmet/ACI International Conference On Superplasticizers and Other Chemical Admixtures in ConcreteDocument20 paginiProceedings of The 5th Canmet/ACI International Conference On Superplasticizers and Other Chemical Admixtures in ConcreteAbdelaziz HasnaouiÎncă nu există evaluări
- Muco AdhesiveDocument47 paginiMuco Adhesivemonika1983007Încă nu există evaluări
- Jurnal Sem Tem FixDocument9 paginiJurnal Sem Tem FixSri Wahyuning Puji Ayu LestariÎncă nu există evaluări
- Characterization of PolymersDocument30 paginiCharacterization of Polymerssuranjana26Încă nu există evaluări
- The Gospel of ThomasDocument19 paginiThe Gospel of ThomassirjsslutÎncă nu există evaluări
- Kyr English 1Document6 paginiKyr English 1Candace HarrisÎncă nu există evaluări
- Aleister Crowley - The Invocation of Thoth Cd4 Id370698676 Size8Document3 paginiAleister Crowley - The Invocation of Thoth Cd4 Id370698676 Size8TethÎncă nu există evaluări
- The Principia Discordia or How The West Was Lost 1st EdDocument74 paginiThe Principia Discordia or How The West Was Lost 1st EdSteven RichardsÎncă nu există evaluări
- Edward Kelley - The Angelic Alphabet Cd3 Id1930900068 Size55Document3 paginiEdward Kelley - The Angelic Alphabet Cd3 Id1930900068 Size55isis_anastasiaÎncă nu există evaluări
- Chromatography: Basic Concepts, Principles, Types and UsesDocument71 paginiChromatography: Basic Concepts, Principles, Types and UsesMhark ChavezÎncă nu există evaluări
- Sylhet Gas Fields Limited (SGFL) : Natural Gas Processing at Molecular Sieve Turbo Expander (MSTE) Plant of SGFLDocument80 paginiSylhet Gas Fields Limited (SGFL) : Natural Gas Processing at Molecular Sieve Turbo Expander (MSTE) Plant of SGFLRafsan Bin Sorwar100% (2)
- Chapter 4 Part 1Document93 paginiChapter 4 Part 1FakhrulShahrilEzanieÎncă nu există evaluări
- NPTEL Solid Catalyst ComponentsDocument254 paginiNPTEL Solid Catalyst Componentsjeas grejoyÎncă nu există evaluări
- A Study of Newly Schiff Base As Corrosion Inhibitor For Metal Corrosion in Acidic MediumDocument6 paginiA Study of Newly Schiff Base As Corrosion Inhibitor For Metal Corrosion in Acidic MediumEditor IJTSRDÎncă nu există evaluări
- Purification of AirDocument8 paginiPurification of Airchatakondu sudhakarÎncă nu există evaluări
- 造纸英语Document360 pagini造纸英语Bruce GÎncă nu există evaluări
- The Mechanisms of Lithium and Sodium Insertion in Carbon MaterialsDocument9 paginiThe Mechanisms of Lithium and Sodium Insertion in Carbon MaterialsragulaceÎncă nu există evaluări
- Steps in Catalytic ReactionDocument13 paginiSteps in Catalytic ReactionFachri AriefÎncă nu există evaluări
- Nova BookDocument208 paginiNova BookShailesh ShirguppikarÎncă nu există evaluări
- Syllabus For The M.SC Chemistry Entrance ExaminationDocument3 paginiSyllabus For The M.SC Chemistry Entrance ExaminationNisargaÎncă nu există evaluări
- PDFDocument20 paginiPDFThirunavuk KarasuÎncă nu există evaluări
- LJ Parameters For Propane PropeneDocument5 paginiLJ Parameters For Propane Propenesridhar pallaÎncă nu există evaluări
- Kinetics of Methanol Synthesis From Carbon Dioxide-Portha2017Document24 paginiKinetics of Methanol Synthesis From Carbon Dioxide-Portha2017fkgui2014Încă nu există evaluări
- Water and Wastewater References, Models, and Terminology: 3.1 Setting The StageDocument10 paginiWater and Wastewater References, Models, and Terminology: 3.1 Setting The StageAymene Salah BendrihemÎncă nu există evaluări
- Drying of Air by Fixed Bed Adsorption Using Molecular SievesDocument216 paginiDrying of Air by Fixed Bed Adsorption Using Molecular SievesKimberly BautistaÎncă nu există evaluări
- Purification of Anthocyanins From Red Cabbage Using Semi Interpenetrating Network Hydrogel Beads in A Packed Bed ColumnDocument9 paginiPurification of Anthocyanins From Red Cabbage Using Semi Interpenetrating Network Hydrogel Beads in A Packed Bed ColumnShankara NarayananÎncă nu există evaluări
- Crude Palm Oil Refining Process by Gibon 2007Document21 paginiCrude Palm Oil Refining Process by Gibon 2007AlexÎncă nu există evaluări
- Feldman e SeredaDocument10 paginiFeldman e SeredaKimberley HollandÎncă nu există evaluări
- Sd ArticleDocument44 paginiSd ArticleSimon ChovauÎncă nu există evaluări
- Purifying Biogas to Fuel TransportationDocument24 paginiPurifying Biogas to Fuel TransportationshazaÎncă nu există evaluări
- Chapter 6: An Introduction To The Chemistry of D-Block ElementDocument16 paginiChapter 6: An Introduction To The Chemistry of D-Block ElementseechaiÎncă nu există evaluări
- Es 201454 UDocument7 paginiEs 201454 UcutdianÎncă nu există evaluări
- Ange 201001517Document4 paginiAnge 201001517malka ShahidÎncă nu există evaluări
- On The Atomistic Theory of Nucleation RateDocument8 paginiOn The Atomistic Theory of Nucleation RateRicardo MarquezÎncă nu există evaluări
- Sedimentation Process PaperDocument46 paginiSedimentation Process PaperColai VlogsÎncă nu există evaluări
- Ө= 0°C, P*=429.6 Kpa: Geotech. & Geoenvir. Engrg. 123,324 (1997) ) Have Studied TheDocument1 paginăӨ= 0°C, P*=429.6 Kpa: Geotech. & Geoenvir. Engrg. 123,324 (1997) ) Have Studied TheKevin SanjayaÎncă nu există evaluări
- Homogeneous and Heterogeneous Catalysts For Multicomponent ReactionsDocument43 paginiHomogeneous and Heterogeneous Catalysts For Multicomponent Reactionswakanda foreverÎncă nu există evaluări
- Lignocellulosic Biomass-Based Engineered Biochar CompositesDocument20 paginiLignocellulosic Biomass-Based Engineered Biochar CompositesLeta DerejeÎncă nu există evaluări
- Green Diesel Production From Upgrading of Cashew Nut Shell Liquid PDFDocument11 paginiGreen Diesel Production From Upgrading of Cashew Nut Shell Liquid PDFDaniela J. TitusÎncă nu există evaluări