S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- ESSAY ONE - Idiomaterial PhysicsDocument49 paginiESSAY ONE - Idiomaterial PhysicsMichael Lee Hill100% (2)
- Circular Motion - IB WorksheetDocument4 paginiCircular Motion - IB WorksheetJessica Guy0% (1)
- Landing Gear Design and DevelopmentDocument12 paginiLanding Gear Design and DevelopmentC V CHANDRASHEKARAÎncă nu există evaluări
- Contiguous Pile Design With StrutsDocument5 paginiContiguous Pile Design With StrutsHabib Ur RahmanÎncă nu există evaluări
- Moment Redistribution in BeamsDocument12 paginiMoment Redistribution in BeamsChukwuka WayemeruÎncă nu există evaluări
- Earthquakes and Faults LectureDocument41 paginiEarthquakes and Faults Lectureervynsana100% (1)
- Simulation of Fatigue Composite Ncode To Post2 PDFDocument31 paginiSimulation of Fatigue Composite Ncode To Post2 PDFylionkingxÎncă nu există evaluări
- CH 1 Introduction To Production and Operations Management NormanDocument40 paginiCH 1 Introduction To Production and Operations Management NormanC V CHANDRASHEKARAÎncă nu există evaluări
- Geotechnical Aspects of Dam SafetyDocument63 paginiGeotechnical Aspects of Dam SafetySanjay SibalÎncă nu există evaluări
- On The Approximate Analytical Solution To Non-Linear Oscillation SystemsDocument11 paginiOn The Approximate Analytical Solution To Non-Linear Oscillation SystemsC V CHANDRASHEKARAÎncă nu există evaluări
- Notes:: Finite Element Method by J. N. Reddy, 3Document1 paginăNotes:: Finite Element Method by J. N. Reddy, 3C V CHANDRASHEKARAÎncă nu există evaluări
- Computer Program FEM1DF15 (Ch7)Document33 paginiComputer Program FEM1DF15 (Ch7)C V CHANDRASHEKARAÎncă nu există evaluări
- Corporate FinanceDocument25 paginiCorporate Financenirob0160% (2)
- Circular MotionDocument2 paginiCircular MotionCarmelle Zia ReyesÎncă nu există evaluări
- The Poisson Bracket and Magnetic Monopoles PDFDocument9 paginiThe Poisson Bracket and Magnetic Monopoles PDFVIMALESH SINGH YADAVÎncă nu există evaluări
- Determining The Deformation and Strength Characteristics of Soil by The Plate Loading TestDocument13 paginiDetermining The Deformation and Strength Characteristics of Soil by The Plate Loading TestTarek KhallafÎncă nu există evaluări
- Worksheet For Trapezoidal Channel - 1: Project DescriptionDocument2 paginiWorksheet For Trapezoidal Channel - 1: Project DescriptionMax FerrolÎncă nu există evaluări
- Emwf - t185 QsDocument6 paginiEmwf - t185 QsSiva KumarÎncă nu există evaluări
- 01.mechanical Black BoxDocument6 pagini01.mechanical Black BoxZaeem Ul IslamÎncă nu există evaluări
- BennettDocument271 paginiBennettLew MingÎncă nu există evaluări
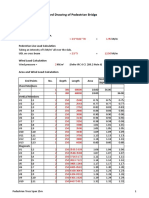
- Preparation of Standard Drawing of Pedestrian Bridge Span: 60 M Load CalculationsDocument19 paginiPreparation of Standard Drawing of Pedestrian Bridge Span: 60 M Load CalculationsRoshan KejariwalÎncă nu există evaluări
- Bond, Anchorage, and Development Length PDFDocument12 paginiBond, Anchorage, and Development Length PDFBlend DlerÎncă nu există evaluări
- Forced Response of Swirl Stabilized Flames in Hydrogen Enriched Gas TurbinesDocument129 paginiForced Response of Swirl Stabilized Flames in Hydrogen Enriched Gas TurbinesLi-An DingÎncă nu există evaluări
- Moment-Rotation Characterization of Cold-Formed Steel Beam in Box SectionDocument1 paginăMoment-Rotation Characterization of Cold-Formed Steel Beam in Box SectionXavier NietoÎncă nu există evaluări
- Two Hardening Mechanisms in Single Crystal Thin Films Studied by Discrete Dislocation PlasticityDocument14 paginiTwo Hardening Mechanisms in Single Crystal Thin Films Studied by Discrete Dislocation Plasticitykelsiu1Încă nu există evaluări
- Subject: Theory of Machines-II: Sample Multiple Choice QuestionDocument13 paginiSubject: Theory of Machines-II: Sample Multiple Choice QuestionSawai PareshÎncă nu există evaluări
- CFD Report: Submitted by Vipul Agrawal 2018H1410129H M.E Design EngineeringDocument12 paginiCFD Report: Submitted by Vipul Agrawal 2018H1410129H M.E Design EngineeringVipul AgrawalÎncă nu există evaluări
- Mechanical Properties of AluminiumDocument8 paginiMechanical Properties of AluminiumChandan KumarÎncă nu există evaluări
- Six Behavioral ObjectivesDocument4 paginiSix Behavioral Objectivesapi-349767644Încă nu există evaluări
- XI Physics Holiday AssignmentsDocument2 paginiXI Physics Holiday AssignmentsAnushka MishraÎncă nu există evaluări
- Analytic Solutions of A Two Dimensional Rectangular Heat Equation PDFDocument5 paginiAnalytic Solutions of A Two Dimensional Rectangular Heat Equation PDFreff1694Încă nu există evaluări
- 1975 R. I. Skinner J. M. Kelly A. J. Heine 1975 - Hysteretic Dampers For Earthquake-Resistant Structures PDFDocument10 pagini1975 R. I. Skinner J. M. Kelly A. J. Heine 1975 - Hysteretic Dampers For Earthquake-Resistant Structures PDFSaurabh TakÎncă nu există evaluări
- Experiment # 3: Objective:: Fig: 3.1 (Pelton Wheel Turbine)Document3 paginiExperiment # 3: Objective:: Fig: 3.1 (Pelton Wheel Turbine)waseemjuttÎncă nu există evaluări
- Flange CouplingDocument16 paginiFlange CouplingARUN VÎncă nu există evaluări
- Hybridization of Atomic Orbitals 8Document8 paginiHybridization of Atomic Orbitals 8Vikas SinghÎncă nu există evaluări