S-ar putea să vă placă și
- 2012-Assessment of Physico-Chemical Characteristics of Groundwater in ChennaiDocument5 pagini2012-Assessment of Physico-Chemical Characteristics of Groundwater in ChennaiPoorni JayaramanÎncă nu există evaluări
- A Study On The Landfill Leachate and Its Impact On The Groundwater Quality of The Greater AreaDocument17 paginiA Study On The Landfill Leachate and Its Impact On The Groundwater Quality of The Greater AreaFatin Al-Khuza'iÎncă nu există evaluări
- Ec8353 Edc Unit5Document108 paginiEc8353 Edc Unit5Poorni JayaramanÎncă nu există evaluări
- Share Tables - Ass 5-2Document2 paginiShare Tables - Ass 5-2Poorni JayaramanÎncă nu există evaluări
- Ec 1251 Electronics Circuits IIDocument17 paginiEc 1251 Electronics Circuits IIainugiri100% (1)
- Ec8353 Edc Unit3Document132 paginiEc8353 Edc Unit3Poorni JayaramanÎncă nu există evaluări
- Semiconductorsrawatdagreatt 141012001301 Conversion Gate01Document68 paginiSemiconductorsrawatdagreatt 141012001301 Conversion Gate01Poorni JayaramanÎncă nu există evaluări
- Clipper and ClamperDocument11 paginiClipper and ClamperPoorni Jayaraman100% (1)
- Unit 1Document74 paginiUnit 1Poorni JayaramanÎncă nu există evaluări
- Ee6403 DTSSP Even QB PDFDocument51 paginiEe6403 DTSSP Even QB PDFPoorni JayaramanÎncă nu există evaluări
- thm05 - Adhoc p2Document75 paginithm05 - Adhoc p2Poorni JayaramanÎncă nu există evaluări
- thm05 - Adhoc p2Document75 paginithm05 - Adhoc p2Poorni JayaramanÎncă nu există evaluări
- Analog-to-Digital Converter (ADC) and Digital-to-Analog Converter (DAC)Document23 paginiAnalog-to-Digital Converter (ADC) and Digital-to-Analog Converter (DAC)Preethi GopalanÎncă nu există evaluări
- Automotive SafetyDocument50 paginiAutomotive SafetyPoorni Jayaraman0% (1)
- Ipv 6 Icmpv 6Document65 paginiIpv 6 Icmpv 6Poorni JayaramanÎncă nu există evaluări
- PresentationDocument15 paginiPresentationPoorni JayaramanÎncă nu există evaluări
- Automated Mechanical Transmission Control SystemDocument6 paginiAutomated Mechanical Transmission Control SystemPoorni JayaramanÎncă nu există evaluări
- Analog-to-Digital Converter (ADC) and Digital-to-Analog Converter (DAC)Document23 paginiAnalog-to-Digital Converter (ADC) and Digital-to-Analog Converter (DAC)Preethi GopalanÎncă nu există evaluări
- Communication Skills PPT Effective Communication TechniquesDocument17 paginiCommunication Skills PPT Effective Communication Techniquescharles7777777Încă nu există evaluări
- Lecture 10: Error Control Coding IDocument40 paginiLecture 10: Error Control Coding ICường NguyễnÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- ElecsysDocument19 paginiElecsysShams ul hassanÎncă nu există evaluări
- Endat 2.2 - Bidirectional Interface For Position Encoders: Power SupplyDocument16 paginiEndat 2.2 - Bidirectional Interface For Position Encoders: Power SupplyPetio MineffÎncă nu există evaluări
- ACTILITY LoRaWANDocument17 paginiACTILITY LoRaWANWilkins CedanoÎncă nu există evaluări
- Veex TX130M+ (055-093)Document39 paginiVeex TX130M+ (055-093)Sandra Milena Niño UribeÎncă nu există evaluări
- UE19CS352 - CC - HLP - Lecture 5Document15 paginiUE19CS352 - CC - HLP - Lecture 5Manogna GvÎncă nu există evaluări
- HL CAS DVBStreamer EN LDocument2 paginiHL CAS DVBStreamer EN LKapil MalikÎncă nu există evaluări
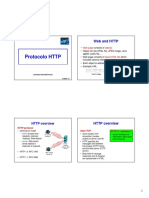
- HTTP ProtocolDocument16 paginiHTTP ProtocolHao NguyenÎncă nu există evaluări
- Computer Network NotesDocument4 paginiComputer Network NotesDevika DakhoreÎncă nu există evaluări
- RZ AmiDocument13 paginiRZ AmiCarlos Andres Arias LopezÎncă nu există evaluări
- Merlin Gerin, Telemecanique, SquareD - Cyberall GroupDocument334 paginiMerlin Gerin, Telemecanique, SquareD - Cyberall Groupernesto floresÎncă nu există evaluări
- 1.4.1.1 We Really Could Use A Map InstructionsDocument2 pagini1.4.1.1 We Really Could Use A Map InstructionsIyhhrhfhahnhz ZhulhihvhahnÎncă nu există evaluări
- 1 Introduction To Computer NetworkingDocument53 pagini1 Introduction To Computer Networkingmosesdivine661Încă nu există evaluări
- What Is LTE?: Section ADocument28 paginiWhat Is LTE?: Section AAnkur Samsung2Încă nu există evaluări
- Schneider PPT - Autorecloser - SectionalizerDocument53 paginiSchneider PPT - Autorecloser - SectionalizerThức Võ100% (2)
- Vlajic12 Albert BausiliDocument2 paginiVlajic12 Albert BausiliAlbert BausiliÎncă nu există evaluări
- 642 785Document56 pagini642 785Cristina JuravleÎncă nu există evaluări
- Controls Solutions - Facility Explorer-Portugues-R6Document20 paginiControls Solutions - Facility Explorer-Portugues-R6dcurtiÎncă nu există evaluări
- Cisco ASA ASDM ConfigurationDocument840 paginiCisco ASA ASDM Configurationnetgame76Încă nu există evaluări
- 1 GSM Principles and Call FlowDocument263 pagini1 GSM Principles and Call Flowjitu_rf100% (1)
- Cs-637 - Wireless CommunicationsDocument2 paginiCs-637 - Wireless CommunicationsBalaKrishna KesaniÎncă nu există evaluări
- Asynchronous vs Synchronous Serial Data CommunicationDocument6 paginiAsynchronous vs Synchronous Serial Data CommunicationVasthav KalluriÎncă nu există evaluări
- Reason RT430/RT434: GNSS Precision-Time ClockDocument101 paginiReason RT430/RT434: GNSS Precision-Time ClockElcio RomblespergerÎncă nu există evaluări
- Hitachi PLCDocument4 paginiHitachi PLCAnonymous T0KltPÎncă nu există evaluări
- CCNA Exploration Network Fundamentals Chapter 6Document37 paginiCCNA Exploration Network Fundamentals Chapter 6OlegÎncă nu există evaluări
- ZTEW300Document13 paginiZTEW300minhÎncă nu există evaluări
- Nfpa 72: National Fire Alarm CodeDocument8 paginiNfpa 72: National Fire Alarm CodeSabir NaseerÎncă nu există evaluări
- Student Projects in Computer Networking: Simulation vs CodingDocument6 paginiStudent Projects in Computer Networking: Simulation vs CodingAjeethÎncă nu există evaluări
- Low Latency Scheduling in MPTCPDocument15 paginiLow Latency Scheduling in MPTCPMohamed NaimiÎncă nu există evaluări