S-ar putea să vă placă și
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueDe la EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueÎncă nu există evaluări
- Bâtiment Zéro Énergie: L'énergie totale consommée par les services publics est égale à l'énergie renouvelable totale produiteDe la EverandBâtiment Zéro Énergie: L'énergie totale consommée par les services publics est égale à l'énergie renouvelable totale produiteÎncă nu există evaluări
- Présentataion+d avancement+de+ma+thèse+à+la+FS+30+01+2008Document23 paginiPrésentataion+d avancement+de+ma+thèse+à+la+FS+30+01+2008Farid Bou75% (4)
- Rapport Informatique Industrielle CHENILLARD 8 LEDDocument31 paginiRapport Informatique Industrielle CHENILLARD 8 LEDFICPI ENSET50% (2)
- Presentation Du Pic 16f877 PDFDocument22 paginiPresentation Du Pic 16f877 PDFKiadam Kitou100% (1)
- ProgCN 2Document13 paginiProgCN 2Rahmani AbdelazizÎncă nu există evaluări
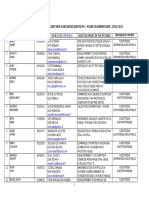
- Liste Bureau D EtudeDocument6 paginiListe Bureau D EtudeAnonymous DjA2T2I263% (8)
- Modélisation Cinématique Dune Machine CNC PDFDocument112 paginiModélisation Cinématique Dune Machine CNC PDFBentchikou Moh100% (2)
- 34 PDFDocument32 pagini34 PDFDhawi AymenÎncă nu există evaluări
- Commande de Deux Moteurs Pas À Pas Via Le Port Paralléle Avec DelphiDocument51 paginiCommande de Deux Moteurs Pas À Pas Via Le Port Paralléle Avec DelphiHachemi Bhe83% (12)
- MicrocontroleursDocument61 paginiMicrocontroleursJamila DebayaÎncă nu există evaluări
- Contrôle D'une Machine Asynchrone Par L'estimation de La VitesseDocument41 paginiContrôle D'une Machine Asynchrone Par L'estimation de La VitesseBenkhada Hamane100% (5)
- CoursmicroreduitDocument87 paginiCoursmicroreduitapi-3826166100% (2)
- Stratégies de Commande Et Techniques Intelligentes Appliquées Aux Machines de Type SynchroneDocument121 paginiStratégies de Commande Et Techniques Intelligentes Appliquées Aux Machines de Type SynchroneKesraoui Hichem100% (5)
- 03.ProgrammationISO GMTMM2 PDFDocument14 pagini03.ProgrammationISO GMTMM2 PDFBentchikou MohÎncă nu există evaluări
- ST-Link V2 USB Dongle Programmer - FRDocument18 paginiST-Link V2 USB Dongle Programmer - FRPI PICOÎncă nu există evaluări
- Route MemoireDocument121 paginiRoute MemoireAbdoulnassirou Bassongou100% (4)
- Pfe Ing ElnDocument66 paginiPfe Ing ElnZaki ZakavÎncă nu există evaluări
- Encadrement Master2 DEP GMDocument8 paginiEncadrement Master2 DEP GMkasulu josiasÎncă nu există evaluări
- Prog Iciem14 PDFDocument9 paginiProg Iciem14 PDFCarlo MilanoÎncă nu există evaluări
- Pfe Deua ElnDocument17 paginiPfe Deua Elnriad3122Încă nu există evaluări
- Pfe Ing ElnDocument66 paginiPfe Ing Elnsalah kajkoujÎncă nu există evaluări
- Elec Benderradji Hadda PDFDocument132 paginiElec Benderradji Hadda PDFHattab AbdellilahÎncă nu există evaluări
- Makhlouf PDFDocument124 paginiMakhlouf PDFSidahmed Larbaoui100% (1)
- Emsi Projets Ex 5a 2017 18Document7 paginiEmsi Projets Ex 5a 2017 18Zakaria MaazazÎncă nu există evaluări
- PFEs 2011 GDocument9 paginiPFEs 2011 GSaida BenmalekÎncă nu există evaluări
- TheseMogos PDFDocument199 paginiTheseMogos PDFAmine BenseddikÎncă nu există evaluări
- BibliographieDocument2 paginiBibliographieIslam MęĐjÎncă nu există evaluări
- Pfe EnimDocument32 paginiPfe EnimMohamed Radhouane50% (2)
- Liste Des Projets de Fin Detudes ElectroDocument15 paginiListe Des Projets de Fin Detudes ElectroAbdelghani ChenikiÎncă nu există evaluări
- Pfe Deua Ett PDFDocument15 paginiPfe Deua Ett PDFMbama Prince Gildas 2Încă nu există evaluări
- Brahimi MustaphaDocument81 paginiBrahimi MustaphaDjalti mohamedÎncă nu există evaluări
- Bel 5688Document147 paginiBel 5688YahiaRealÎncă nu există evaluări
- TP 11Document5 paginiTP 11m.boudraaÎncă nu există evaluări
- List of Accepted Papers Icsip 13Document11 paginiList of Accepted Papers Icsip 13Yassine Ben AhmedÎncă nu există evaluări
- Ms ELN Goual+AbbasDocument154 paginiMs ELN Goual+AbbasabfstbmsodÎncă nu există evaluări
- TP 1Document5 paginiTP 1m.boudraaÎncă nu există evaluări
- 2012 2 PDFDocument72 pagini2012 2 PDFالإخبارية DZÎncă nu există evaluări
- Contribution Optimisation de La Puissance ReactiveDocument136 paginiContribution Optimisation de La Puissance ReactiveRed Jokyle100% (1)
- ADOUANE MabroukDocument93 paginiADOUANE MabroukEgide Ilunga MpianaÎncă nu există evaluări
- Ship Construction 5EDocument8 paginiShip Construction 5EHanin BouzianeÎncă nu există evaluări
- AbdelliDocument211 paginiAbdelliRebahi FaresÎncă nu există evaluări
- Bib Elio Graph I QueDocument2 paginiBib Elio Graph I QueNate RiverÎncă nu există evaluări
- G: DFLDocument16 paginiG: DFLAmar MedjaldiÎncă nu există evaluări
- BibliographieDocument8 paginiBibliographiebillel meghniÎncă nu există evaluări
- Commande Des Machines Asynchrones Abdessamia ElgharbiDocument6 paginiCommande Des Machines Asynchrones Abdessamia Elgharbiabdogharbi5650Încă nu există evaluări
- Khadem MiloudDocument63 paginiKhadem MiloudDavi Nordel NgondzaÎncă nu există evaluări
- Art12-4 2Document9 paginiArt12-4 2Francis Logamou AdoumÎncă nu există evaluări
- Noudj Youcef - Achi Mohammed AmineDocument90 paginiNoudj Youcef - Achi Mohammed AmineNadj Rouag (Nadji)Încă nu există evaluări
- Art12-4 2Document9 paginiArt12-4 2Amina LaarabiÎncă nu există evaluări
- Commande Par Mode Glissant Flou D'une MADA-convertiDocument14 paginiCommande Par Mode Glissant Flou D'une MADA-convertirania achaichÎncă nu există evaluări
- Etude Et Réalisation D'un Onduleur de Tension Triphasé À MLIDocument59 paginiEtude Et Réalisation D'un Onduleur de Tension Triphasé À MLIzouhair qobiÎncă nu există evaluări
- Session GE - 01: M.Jilani KNANIDocument17 paginiSession GE - 01: M.Jilani KNANIArt Mohamed IdrissiÎncă nu există evaluări
- MODELISATION ET DIAGNOSTIQUE DE DEFAUTS DE COURT-CIRCUIT DE LA MACHINE SYNCHRONE A AIMANTS PERMANENTS - Par - KAPONGO KAFWILA - Bac III ELMDocument3 paginiMODELISATION ET DIAGNOSTIQUE DE DEFAUTS DE COURT-CIRCUIT DE LA MACHINE SYNCHRONE A AIMANTS PERMANENTS - Par - KAPONGO KAFWILA - Bac III ELMIdris KapongoÎncă nu există evaluări
- Cours 8 - Capteurs Et Actionneurs 2 Modélisation Et Commande Des Machines ElectriquesDocument2 paginiCours 8 - Capteurs Et Actionneurs 2 Modélisation Et Commande Des Machines ElectriquesMisterÎncă nu există evaluări
- Systemes Hybrides de GenerationDocument35 paginiSystemes Hybrides de Generation13121977100% (1)
- Ejee 2011 KhouchaDocument19 paginiEjee 2011 KhouchabilalÎncă nu există evaluări
- Soufiane SouiciDocument70 paginiSoufiane SouiciZineb HamzaÎncă nu există evaluări
- MESBAHI AbdelouahedDocument193 paginiMESBAHI AbdelouahedHamza Kabir KabirÎncă nu există evaluări
- EL KASSIR Fawzia-Web PDFDocument174 paginiEL KASSIR Fawzia-Web PDFYoussef JakeÎncă nu există evaluări
- Inj BAHA HAKIM PDFDocument143 paginiInj BAHA HAKIM PDFahmed zeraoulaÎncă nu există evaluări
- Mini Projet PV GEADocument24 paginiMini Projet PV GEAkun bayemiÎncă nu există evaluări
- Bilan Lec Khezzar EltDocument5 paginiBilan Lec Khezzar EltZakaria SamaiÎncă nu există evaluări
- Modelisation Et Commande AvancéeDocument76 paginiModelisation Et Commande Avancéelutterford18Încă nu există evaluări
- Sti2d Spe Ingenierie Innov Dev Durable 2022 Polynesie Sujet Officiel 48 61Document14 paginiSti2d Spe Ingenierie Innov Dev Durable 2022 Polynesie Sujet Officiel 48 61lealeg01Încă nu există evaluări
- Chapitre I PDFDocument16 paginiChapitre I PDFBentchikou Moh100% (1)
- Cours GPA668 E13 02 03 04 05 PDFDocument78 paginiCours GPA668 E13 02 03 04 05 PDFBentchikou MohÎncă nu există evaluări
- Mocn 2 PDFDocument46 paginiMocn 2 PDFBentchikou MohÎncă nu există evaluări
- Pas A Pas PDFDocument20 paginiPas A Pas PDFBentchikou MohÎncă nu există evaluări
- Mocn 2 PDFDocument46 paginiMocn 2 PDFBentchikou MohÎncă nu există evaluări
- Cours 5 MEC3530 A2013Document28 paginiCours 5 MEC3530 A2013Bentchikou MohÎncă nu există evaluări
- Commande de MoteurDocument19 paginiCommande de MoteurBentchikou MohÎncă nu există evaluări
- Mes5348 PDFDocument94 paginiMes5348 PDFBentchikou Moh100% (2)
- Les Axes Xyz PDFDocument8 paginiLes Axes Xyz PDFBentchikou MohÎncă nu există evaluări
- Chapitre 2 Signaux Deterministes Temps ContinuDocument14 paginiChapitre 2 Signaux Deterministes Temps ContinuBentchikou MohÎncă nu există evaluări
- Commande Dun Moteur Pasapas PDFDocument16 paginiCommande Dun Moteur Pasapas PDFBentchikou MohÎncă nu există evaluări
- Didactiques Feedback PDFDocument4 paginiDidactiques Feedback PDFBentchikou MohÎncă nu există evaluări
- Fac-T-LMD-M-Master Aautomatique Des SystèmesDocument29 paginiFac-T-LMD-M-Master Aautomatique Des SystèmesBentchikou MohÎncă nu există evaluări
- Bus Devices - F1213bDocument16 paginiBus Devices - F1213babderrahmaneÎncă nu există evaluări
- Rapport de Projet de Fin D'etude44Document43 paginiRapport de Projet de Fin D'etude44AMINE AZZAOUIÎncă nu există evaluări
- ELT Réseaux ElectriqueDocument49 paginiELT Réseaux ElectriqueTarak Benslimane0% (1)
- Cours V4Document104 paginiCours V4CHADDOUÎncă nu există evaluări
- Partie 4Document45 paginiPartie 4Hamza MhalÎncă nu există evaluări
- Rapport PFEDocument68 paginiRapport PFEChayma LahdhiriÎncă nu există evaluări
- Automatisme TLE MVT Tri 1Document8 paginiAutomatisme TLE MVT Tri 1Kevin Ipoumb100% (5)
- Amara WissamDocument107 paginiAmara Wissamwed babaÎncă nu există evaluări
- Compte Rendu Des Tps D'informatique Industrielle: Réalisé ParDocument12 paginiCompte Rendu Des Tps D'informatique Industrielle: Réalisé ParMoad MerzoukÎncă nu există evaluări
- CH III Le Microcontrôleur VERSION 2020 2021Document14 paginiCH III Le Microcontrôleur VERSION 2020 2021Nada DjenaneÎncă nu există evaluări
- Réaliser Par:: Mini-Projet 1Document32 paginiRéaliser Par:: Mini-Projet 1Chahla EssounniÎncă nu există evaluări
- Ab Pic 16F84Document46 paginiAb Pic 16F84Kamal PcÎncă nu există evaluări
- La Carte Arduino UNO PDFDocument3 paginiLa Carte Arduino UNO PDFben yahia mohamedÎncă nu există evaluări
- KRAMA Abdelbasset GOUGUI Abdelmoumen PDFDocument77 paginiKRAMA Abdelbasset GOUGUI Abdelmoumen PDFspeedov73Încă nu există evaluări
- Conception D'un SuiveurDocument17 paginiConception D'un SuiveurHaroun MissaouiÎncă nu există evaluări
- Cours 2 - La Carte Arduino UnoDocument2 paginiCours 2 - La Carte Arduino UnoMomo TlmsmohÎncă nu există evaluări
- Commande À Distance Par Courant Porteur 1 À 8 CanauxDocument11 paginiCommande À Distance Par Courant Porteur 1 À 8 Canauxneworld3175100% (1)
- Presentation Pic 16f84a - New1Document6 paginiPresentation Pic 16f84a - New1Davy Jean DrahaÎncă nu există evaluări
- Système de Diagnostic Automobile IntelligentDocument3 paginiSystème de Diagnostic Automobile IntelligentAhmed JguirimÎncă nu există evaluări
- Tronconneuse AutomatiqueDocument67 paginiTronconneuse AutomatiqueMarcelin BouadouÎncă nu există evaluări
- Notes AODocument4 paginiNotes AOAhmed KachkachÎncă nu există evaluări
- Master Pro Automatismes IndustrielsDocument58 paginiMaster Pro Automatismes IndustrielsÇastànô Môsës0% (1)
- 25 ExercicesDocument62 pagini25 ExercicesmahaÎncă nu există evaluări
- RobotiqueDocument26 paginiRobotiqueLaiLaLfkÎncă nu există evaluări
- SMI C1 IntroductionDocument17 paginiSMI C1 IntroductionsezonovaldesÎncă nu există evaluări