S-ar putea să vă placă și
- Petrobras Netherlands BV Fpso Cidade de Ilhabela Topsides Ts267 Manifold D Piping Iso View A1 1:100 1 1Document1 paginăPetrobras Netherlands BV Fpso Cidade de Ilhabela Topsides Ts267 Manifold D Piping Iso View A1 1:100 1 1instrengÎncă nu există evaluări
- PEDWPITS999227Document1 paginăPEDWPITS999227instrengÎncă nu există evaluări
- PEDWPITS999230Document1 paginăPEDWPITS999230instrengÎncă nu există evaluări
- Petrobras Netherlands BV Fpso Cidade de Ilhabela Topsides Ts077 Pancake Main Structure Arrangement A1 1:75 1 1Document1 paginăPetrobras Netherlands BV Fpso Cidade de Ilhabela Topsides Ts077 Pancake Main Structure Arrangement A1 1:75 1 1instrengÎncă nu există evaluări
- Description of Revision Date (dd-MMM-yy)Document1 paginăDescription of Revision Date (dd-MMM-yy)instrengÎncă nu există evaluări
- Petrobras Netherlands BV Fpso Cidade de Ilhabela Topsides Ts077 Flare Ko Drum Module Equipment & Escape Route Layout A1 1:100 1 1Document1 paginăPetrobras Netherlands BV Fpso Cidade de Ilhabela Topsides Ts077 Flare Ko Drum Module Equipment & Escape Route Layout A1 1:100 1 1instrengÎncă nu există evaluări
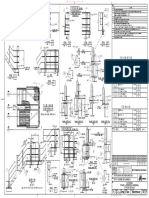
- Petrobras Netherlands BV Fpso Cidade de Ilhabela Topsides Ts077 Pancake Main Structure Construction Drawing 1 A1 1:75 1 1Document1 paginăPetrobras Netherlands BV Fpso Cidade de Ilhabela Topsides Ts077 Pancake Main Structure Construction Drawing 1 A1 1:75 1 1instrengÎncă nu există evaluări
- Petrobras Netherlands BV Fpso Cidade de Ilhabela Topsides Stairs, Ladders & Handrail Typical Details A1Document1 paginăPetrobras Netherlands BV Fpso Cidade de Ilhabela Topsides Stairs, Ladders & Handrail Typical Details A1instrengÎncă nu există evaluări
- Petrobras Netherlands BV Fpso Cidade de Ilhabela Topsides Stairs, Ladders & Handrail Typical Details A1Document1 paginăPetrobras Netherlands BV Fpso Cidade de Ilhabela Topsides Stairs, Ladders & Handrail Typical Details A1instrengÎncă nu există evaluări
- General Notes: Petrobras Netherlands BV Fpso Cidade de Ilhabela Topsides Piping Layout (Below El. +105.000) A0 1:50 1 1Document1 paginăGeneral Notes: Petrobras Netherlands BV Fpso Cidade de Ilhabela Topsides Piping Layout (Below El. +105.000) A0 1:50 1 1instrengÎncă nu există evaluări
- Pedwstts004001 006V2Document1 paginăPedwstts004001 006V2instrengÎncă nu există evaluări
- Project: FT Catcher Fpso Feed: Hvac - Heater Load CalculationDocument7 paginiProject: FT Catcher Fpso Feed: Hvac - Heater Load CalculationinstrengÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Banda Hoja de DatosDocument1 paginăBanda Hoja de DatosSergio Guevara MenaÎncă nu există evaluări
- FD100 CatalogoDocument4 paginiFD100 CatalogoKaren VásconezÎncă nu există evaluări
- Haldimann - Structural Use of Glass BookDocument221 paginiHaldimann - Structural Use of Glass BookKenny Tournoy100% (6)
- Griet DSP ProgramsDocument14 paginiGriet DSP ProgramsJaipaul CheernamÎncă nu există evaluări
- Unit 01 AssignmentDocument12 paginiUnit 01 Assignmentvipul unagarÎncă nu există evaluări
- Uponor Dop Klett CPR 20 Ic 251 V 001Document3 paginiUponor Dop Klett CPR 20 Ic 251 V 001jamppajoo2Încă nu există evaluări
- Vem BrochureDocument8 paginiVem BrochureVamshi Krishnam Raju NadimpalliÎncă nu există evaluări
- Oracle Exadata Technical Series: Smart ScanDocument59 paginiOracle Exadata Technical Series: Smart ScanVishnusivathej PotukanumaÎncă nu există evaluări
- Section 1: Identification: TurpentineDocument10 paginiSection 1: Identification: TurpentineRobertÎncă nu există evaluări
- KYK CatalogueDocument94 paginiKYK Cataloguepriya kumariÎncă nu există evaluări
- Pile Foundations in Engineering Practice by S - by Civildatas - Blogspot.inDocument784 paginiPile Foundations in Engineering Practice by S - by Civildatas - Blogspot.inTatiana RodríguezÎncă nu există evaluări
- 19 Element YagiDocument4 pagini19 Element YagiVanessa BileÎncă nu există evaluări
- The DSPRCDFMT Utility Version 2.0Document9 paginiThe DSPRCDFMT Utility Version 2.0rachmat99Încă nu există evaluări
- Computer Netwroks 15CS52: Venugopala Rao A S Assistant Professor (Senior) Dept of CSE, SMVITM BantakalDocument12 paginiComputer Netwroks 15CS52: Venugopala Rao A S Assistant Professor (Senior) Dept of CSE, SMVITM BantakalVenugopal RaoÎncă nu există evaluări
- Brother Dr420 Drum ResetDocument1 paginăBrother Dr420 Drum ResetJaime RiosÎncă nu există evaluări
- Physical Pharmacy Answer Key BLUE PACOPDocument34 paginiPhysical Pharmacy Answer Key BLUE PACOPprincessrhenetteÎncă nu există evaluări
- Scarifier 9 Piecies Tooth TypeDocument2 paginiScarifier 9 Piecies Tooth Typeangga setyawanÎncă nu există evaluări
- Career Cluster SurveyDocument6 paginiCareer Cluster Surveydaaiyahnaim100% (1)
- ABB LMU 574 - mcd80Document12 paginiABB LMU 574 - mcd80gadware2011bplÎncă nu există evaluări
- RAB PE20Tx1set Amo, 60HP (1) Cetakan 50kg (400 Balok 16 Can) + Ice Storage 50TDocument3 paginiRAB PE20Tx1set Amo, 60HP (1) Cetakan 50kg (400 Balok 16 Can) + Ice Storage 50THidayat SyamsiÎncă nu există evaluări
- Manual de Instruções John Deere D170 (56 Páginas)Document2 paginiManual de Instruções John Deere D170 (56 Páginas)Antonio CostaÎncă nu există evaluări
- Use of Multimeter TextDocument76 paginiUse of Multimeter Textprueba1100% (2)
- 02-Engine Mechanical System PDFDocument129 pagini02-Engine Mechanical System PDFSigit Indrawan100% (1)
- ZXMP S200 Commissioning Guide - R1.1Document47 paginiZXMP S200 Commissioning Guide - R1.1Achmad Abdil MansyuriÎncă nu există evaluări
- Oilon 4A Monox en StandardDocument16 paginiOilon 4A Monox en StandardWilbert Consuelo CotrinaÎncă nu există evaluări
- DUNAN Fan Coil UnitDocument14 paginiDUNAN Fan Coil UnitDjordjeÎncă nu există evaluări
- NAEC Approved Continuing Education 2018marchDocument26 paginiNAEC Approved Continuing Education 2018marchRuano Andreola StumpfÎncă nu există evaluări
- Unit 5 GeosyntheticsDocument315 paginiUnit 5 Geosyntheticskowshik1737551Încă nu există evaluări
- Azimuthal Instabilities in Annular Combustion ChambersDocument11 paginiAzimuthal Instabilities in Annular Combustion ChambersLarry SmithÎncă nu există evaluări
- Master Antenna Television System and Satellite SystemDocument6 paginiMaster Antenna Television System and Satellite SystemMHEP_DANIELÎncă nu există evaluări